 2025, Vol. 42
2025, Vol. 42扩展功能
文章信息
- 罗强, 刘绍鎏, 臧晓冬, 陈舒逸, 陈信强.
- LUO Qiang, LIU Shaoliu, ZANG Xiaodong, CHEN Shuyi, CHEN Xinqiang
- 考虑纵横向异质性的车辆轨迹数据多步重构方法
- Multi-step reconstruction method for vehicle trajectory data considering longitudinal and lateral heterogeneity
- 公路交通科技, 2025, 42(5): 43-51
- Journal of Highway and Transportation Research and Denelopment, 2025, 42(5): 43-51
- 10.3969/j.issn.1002-0268.2025.05.005
-
文章历史
- 收稿日期: 2024-05-17





2. 广州大学 机械与电气工程学院, 广东 广州 510006;
3. 上海海事大学 物流科学与工程研究院, 上海 201306
2. School of Mechanical and Electrical Engineering, Guangzhou University, Guangzhou, Guangdong 510006, China;
3. Institute of Logistics Science and Engineering, Shanghai Maritime University, Shanghai 201306, China
随着数据采集与处理技术的发展,越来越多的车辆行驶轨迹数据被采集、存储和使用[1],如从轨迹数据中提取交通参数(如速度、加速度),用于微观交通流和车辆行驶安全状态的分析[2-3]。本团队也曾从无人机航拍视频中提取车辆轨迹数据,用于交通流状态的分析[4]。然而,原始轨迹数据中经常包含随机误差和异常值,不能直接利用,需要对其进行预处理以提高精度。
数据重构是利用滤波技术对车辆原始轨迹数据进行清洗、过滤和拟合等操作,以提高数据精度的一种方法。传统的重构方法主要是通过低通滤波器对轨迹数据进行简单的平均或平滑操作,降低数据中的高频噪声[4-6]。如张玺君[5]采用二维离散小波变化对出租车的轨迹数据进行降噪,提高了数据的信噪比;Venthuruthiyil[6]和李俊彦[7]分别采用局部加权多项式法和基于Savitzky-Golay滤波器的过滤法等对车辆轨迹进行重构,二者都对车辆轨迹数据精度有所提高;Wei[8]提出了一种基于粒子滤波的轨迹重构方法,通过稀疏探测方法对车辆的轨迹数据进行了重构。后来,为提升滤波器的降噪效果,赵庶旭[9]提出了一种基于反距离权重插值的重构法,更好地修补了轨迹数据的丢失值;唐进君[10]重新设计了粒子滤波的重采样过程,加强对车辆行驶主观行为的模拟,将数据重构准确率提升到94.8%;Dong[11]通过将轨迹数据分解为多个本征模态函数分量的方法,探寻不同时域下轨迹数据的主要分量,既消除了数据中的噪声又确保了数据的物理完整性;Xie[12]优化了基于粒子滤波技术的数据重构法,利用微观交通流模型和环路数据等对车辆轨迹数据进行了有效的重构。
随着机器学习的发展,轨迹数据重构方法又得到进一步改进。张玉虎[13]利用动态卷积算法对轨迹数据进行重构,能有效地捕获复杂的车辆移动特征;Wang[14]基于动态递归神经网络算法构建了轨迹数据重构方法,具有较强的鲁棒性;杨涛[15]在轨迹重构模型中考虑了智能网联车的影响,提升在交通流密度较大状态下的轨迹重构精度;肖竹[16]利用双向卷积算法重构了轨迹数据中缺失的位置信息。上述的方法都属于单步重构法,具有简单便捷的特点,但易导致轨迹重构过度,丢失轨迹原有特征。于是,研究者们利用多步轨迹重构法来解决此问题[17-18],如丁深圳[19]将拉格朗日与卡尔曼滤波理论相结合,对轨迹数据中异常值进行插值和降噪处理;Zhao[20]分别建立了异常识别、过滤和滤波平滑等三步重构法,对交叉口车辆轨迹数据进行了重构。
整体来说,多步重构法对车辆轨迹数据处理效果更佳[21]。但现有方法中缺乏对轨迹数据纵横向异质性的考虑,直接采用相同的滤波器对纵横向数据进行重构可能会导致数据过拟合。另外,虽然现有多步轨迹重构法考虑了异常值的识别与修正,但在降噪处理时未考虑到由车辆异常坐标值推导得到的速度与加速度已严重失真,因此,在进行降噪前需要对速度和加速度等参数进行重计算。
1 轨迹数据多步重构 1.1 数据集介绍近年来,较多的公开数据集被学者们利用,如NGSIM、HighD和CitySim数据集。不同的数据集在采集地点、时间和数据精度等方面均有差异。由于CitySim数据采集帧率高,包含多个国家不同天气和道路类型的航拍数据,具有更好的代表性。因此,本研究以CitySim数据集为数据基础,选用其中的路段上车辆轨迹作为研究对象。如图 1所示,该路段包含11个车道,其中车道0和9为进口匝道,车道2和11为出口匝道,车道1和10为集散车道,车道3~5、6~8为单向车道。本研究提取车道6~8上的车辆轨迹数据为研究对象,行车方向由南向北,路段长度为120 m。

|
| 图 1 路段示意图 Fig. 1 Schematic diagram of road section |
| |
1.2 轨迹预处理
CitySim数据集中车辆轨迹数据字段信息如表 1所示。
| 变量名 | 描述 | 单位 |
| carId | 车辆唯一标识符 | — |
| frameNum | 自检测开始时间 | frames |
| carCenterXft | 车辆中心点x坐标 | Feet |
| carCenterYft | 车辆中心点y坐标 | Feet |
| headXft | 车辆边界前中心点的x坐标 | Feet |
| headYft | 车辆边界前中心点的y坐标 | Feet |
| tailXft | 车辆边界后中心点的x坐标 | Feet |
| tailYft | 车辆边界后中心点的y坐标 | Feet |
为满足后续分析的需求,先利用以下方法对原始数据集进行预处理:
(1) 只提取车道6~11上的车辆轨迹数据,其中车道6~8上的轨迹数据为研究对象,车道9~11上的轨迹数据作为与研究对象有交互性的对象数据。
(2) 轨迹数据的单位转换,根据车辆纵横坐标计算横向与纵向速度,计算式如(1)与式(2)所示。

|
(1) |

|
(2) |
式中,vxti(t),vyti(t),Xti(t),Yti(t)分别为t时刻车辆i的横向与纵向速度、横向与纵向坐标;Δt为相邻两点的时间间隔;dftm为位移单位转换常数(取0.304 8);tfpts为时间单位转换常数(取1/30)。
(3) 为确保轨迹数据的连续性,剔除总帧数较少的轨迹。以车辆编号81的车辆为例,绘制经过预处理后车辆横纵向速度,如图 2和3所示。

|
| 图 2 横向速度变化 Fig. 2 Lateral velocity variation |
| |

|
| 图 3 纵向速度变化 Fig. 3 Longitudinal velocity variation |
| |
从图 2和3中可知,预处理的数据仍有较多噪声,需要进一步地降噪和重构。为了更好地提高数据的精度,本研究先用多步轨迹重构法识别和修正异常值,再利用滤波方法消除轨迹数据中的噪声[22]。
在多步轨迹重构中,异常值通常是利用速度或加速度数据中的离群点进行识别,将异常值对应的轨迹数据进行局部修复。但是如果仅通过单一异常值的识别结果来修正纵横坐标,会导致过度处理而失去数据的原有特征。同时,车辆速度与加速度的计算精度很大程度取决于其纵横坐标的精度,直接利用异常的坐标值计算的速度与加速度存在较大的误差。
因此,基于上述问题的分析,本研究构建一种改进的多步轨迹重构法,具体步骤为:
(1) 对车辆纵横向速度进行简单预处理后,先利用小波分析法识别纵横向轨迹中异常值,后采用三次样条插值法分别修正纵横向坐标,以平衡异常值的修复和轨迹特征的保留。
(2) 基于车辆纵横坐标重新计算纵横向的速度和加速度,提高速度与加速度的精度。
(3) 采用对称指数移动平均法对车辆纵向速度、加速度和坐标数据中的随机噪声进行降噪,运用Savitsky-Golay滤波法对车辆横向速度、加速度和坐标数据中的随机噪声进行降噪。
(4) 采用K-近邻算法匹配目标车辆周边车辆的信息,通过计算目标车与相邻车辆之间的间距检查其完整性,采用五次样条插值法对非物理车距进行坐标局部重建。
(5) 利用步骤(3)中的滤波器对重建非物理车距后的轨迹数据进行降噪,去除步骤(4)中导致的随机噪声。
(6) 重复步骤(4)与步骤(5)直至所有车辆之间的间距均符合物理约束。
1.3 异常值识别与修正从图 2和图 3可见,81号车辆的纵横向速度出现多次突变, 可采用常用的异常值识别与修复方法对其进行局部修正,如傅里叶变换、连续小波变换和离散小波变换等。傅里叶变换可识别信号的完整时间域,但因无法捕捉局部特征导致难以识别突变信号;连续小波变换适用于信号的时频分析,但涉及多个尺度和位置的卷积操作,计算复杂度较高;离散小波变换则是连续小波的离散版本,能捕捉信号的高、低频部分,同时计算效率高,适合大规模数据处理。经过比较,本研究选择离散小波变换,实现信号的多尺度分解。信号重构的函数表达式如下:
|
(3) |
|
(4) |
|
(5) |

|
(6) |
式中,f(t)为重构的信号;Aj(t)和Dj(t)分别为第j层的近似分量和细节分量;j为离散小波变换的层数;cj, k和dj, k分别为近似分量和细节分量的小波系数。
在任意层数上,车辆轨迹(信号)被分解为近似和细节分量,然后近似分量再分解为下一层的近似和细节分量,重复该步骤到目标层,如图 4所示。受物理条件限制,车辆轨迹的信号能量不会集中在特定的小波系数上。因此,可以将信号能量作为识别异常值的特征,这个过程称为小波分析。本研究通过细节分量的小波系数与阈值的比较确定异常值的位置,阈值的定义如式(7)所示。
|
(7) |

|
| 图 4 离散小波变换重构轨迹流程 Fig. 4 Trajectory reconstruction process of discrete wavelet transform |
| |
式中,μj和σj分别为第j层小波系数的均值和标准差;z值为1.96(在95%的置信水平下)。
为保证异常值位置识别的准确性,避免对纵横坐标的过度拟合,本研究以纵横向速度作为小波变换的数据源,通过纵横向速度分别确定纵横向坐标中异常值的位置。对于小波基函数的选择,采用Symlet8母小波对纵横向分别进行离散小波变换,得到纵横向坐标异常值的位置。
本研究针对异常值修正采用三次样条插值法进行轨迹局部重建,通过低次多项式在小区间内逼近数据,拟合出一条光滑的曲线。由于CitySim数据集的采集帧率为30帧/s,重建范围设定为15个数据点,即对异常值位置前后各15个数据点进行重建。对于无法满足15个数据点的轨迹边界异常点,采用全局非异常值拟合曲线进行重建。
1.4 交通参数的重计算速度和加速度是两个重要参数。如果直接通过位置坐标的一阶和二阶导数计算,误差将被成倍放大,尤其在采集帧率为30帧/s的情况下,误差可能放大30倍和300倍。在如此大的误差下进行降噪和拟合效果不佳。因此,在完成异常值识别与修正后,需根据相应公式重新计算并更新车辆的横向和纵向速度,使用相应公式重新计算加速度。
|
(8) |
|
(9) |
式中,Xti(t),Yti(t),axti(t),ayti(t)分别为t时刻车辆i的横向与纵向坐标、横向与纵向加速度;Δt为相邻两点的时间间隔。
1.5 轨迹数据降噪经过上述处理后轨迹数据中仍可能存在较多的低频噪声,需要进一步降噪。由于轨迹数据在横向与纵向的噪声分布程度不同,纵向噪声远多于横向,因此需针对纵横向特点采用不同的降噪方法。
(1) 采用对称指数移动平均法sEMA对纵向轨迹数据进行降噪处理,如式(10)所示。
|
(10) |
式中,xα(ti)和$\widetilde{x}_\alpha\left(t_i\right)$分别为车辆α在ti时刻的原始和平滑后的轨迹点;Nα为车辆α的轨迹点总数;Δ为平滑核宽度;D为平滑窗口宽度。Δ与D的计算表达式如式(11)与(12)所示。

|
(11) |

|
(12) |
式中,dt为时间离散化系数(取1/30);T为实时平滑宽度。根据文献[23]对T值进行标定,分别为:Tx=0.5 s, Tv=1 s, =Ta=4 s,对应位置、速度和加速度实时平滑时平滑宽度T的取值。根据不同轨迹数据类型及数据点位置进行对称平滑,当距离轨迹边界超过3倍平滑核宽度的数据点,平滑窗口宽度取值为3Δ;对于轨迹边界点,通过式(12)计算平滑窗口宽度,保证平滑窗口的对称性。
(2) 采用Savitsky-Golay滤波对横向轨迹数据进行降噪,通过最小二乘法进行局部拟合和重构,从而有效去除不必要的噪声,同时保留原始轨迹特征,特别适用于噪声较少的横向轨迹数据。该滤波有两个关键参数需确定:窗口长度和多项式阶数。窗口长度越大,数据越平滑,但可能导致过拟合;多项式阶数越大,曲线与真实曲线的拟合程度越高。经过多次测试,本研究选定窗口长度为15,阶数为3,分别对横向位置、速度和加速度进行降噪和拟合。
1.6 轨迹数据一致性检测该步骤通过检测目标车辆与周围车辆之间的间距是否符合物理约束来进行。由于无法直接从数据集中获取周围车辆信息,因此需对其进行匹配。经过比较分析,本研究选择K-近邻算法(KNN)来实现周围车辆数据的匹配,并采用曼哈顿距离或欧式距离作为KNN中的距离函数,如式(13)所示。
|
(13) |
式中,dij为车辆轨迹样本之间的距离。xiμ,xjμ分别为车辆i与j在μ时刻的坐标信息。p=1时,距离函数为曼哈顿距离;p=2时,距离函数为欧式距离。
在车辆轨迹数据中,以纵横坐标为输入,采用欧式距离作为轨迹样本间的距离函数。超参数K值决定最近邻车辆的匹配数量,需考虑本车道及左右车道前后车的车辆信息(见图 5)。K值需权衡匹配精度与运行效率,通过测试表明,K值超过12后匹配精度提升减缓,且运行效率明显下降,因此K值取12。当目标车辆处于道路首尾边界时,K值为实际具有交互行为的车辆数。

|
| 图 5 相邻车辆之间相对位置 Fig. 5 Relative positions of adjacent vehicles |
| |
完成相邻车辆匹配后,通过横向坐标判断车辆位置,获取同一时间帧内目标车辆的周围车辆信息,再依据式(14)判断目标车辆与周围车辆的间距是否符合物理约束。

|
(14) |
式中,X(t),Xlead(t)分别为目标车辆和其相邻的前车在t时刻的横向坐标;L,Llead分别为目标车和前车的车长;hmin为检测阈值(取1 m)。
通过一致性检测定位不符合物理约束的数据点,使用五次样条插值法对目标车辆的坐标进行局部重建,范围为15个数据点。重建后,按1.2小节步骤3~6处理,直至所有车辆间距符合物理约束。
2 轨迹数据重构结果本研究中轨迹数据重构分为两大步骤:一是对轨迹数据异常识别和修正;二是对轨迹数据进行降噪处理与一致性验证。在异常值识别与修正中,采用横向速度与纵向速度的异常值位置修正横向坐标与纵向坐标,之后重新对速度和加速度进行计算,仍以车辆81的轨迹数据为例,绘制修正异常值前后的轨迹对比图,如图 6~8所示。

|
| 图 6 异常值修正前后的轨迹对比 Fig. 6 Trajectory comparison before and after outlier correction |
| |

|
| 图 7 异常值修正前后的横向速度对比 Fig. 7 Lateral velocity comparison before and after outlier correction |
| |

|
| 图 8 异常值修正前后的纵向速度对比 Fig. 8 Longitudinal velocity comparison before and after outlier correction |
| |
图 6为车辆原始轨迹数据与进行了异常值修正后的轨迹数据对比图,由图中曲线可知修正后的轨迹数据能有效保证原有轨迹的特征,但仍存在不少噪声。图 7、8分别为由原始轨迹和修正后轨迹数据计算得到横纵向速度的对比情况,从图中可知车辆横向速度数据修正效果显著,在200帧或300帧附近噪声较少;而对于纵向速度,原始纵向速度变化敏感,数据质量差,在修正异常值后部分波动消失,数值质量虽然得到了一定的提高,但仍有较多噪声,需要进一步的降噪处理。
采用对称指数移动平均法与Savitsky-Golay滤波器分别对横向和纵向的车辆轨迹参数(如位置坐标、加速度等)进行降噪平滑处理,对比效果图如图 9所示。

|
| 图 9 异常值修正和重构处理下各参数对比 Fig. 9 Comparison of various parameters with outlier correction and reconstruction |
| |
从图 9(a)中异常值修正和重构的轨迹对比可知,轨迹重构处理后的整体走势与修正异常值轨迹相同,但其在保留原始轨迹特征的同时较好地抑制了数据的剧烈抖动情况。图 9(b)~(e)分别展示了在轨迹数据进行异常值处理和重构两种处理后,从轨迹数据中获取的纵横向速度、纵横向加速度的对比效果,从图中的比较可知,轨迹重构能够大幅提高原始轨迹数据的质量。
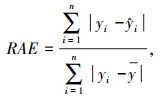
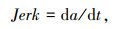
为更好地量化轨迹重构效果,采用相对均方根误差(Relative Root Mean Square Error,RRMSE)和相对绝对误差(Relative Absolute Error,RAE)作为评价指标,采用Jerk分析验证轨迹重构的降噪效果,计算式如下:
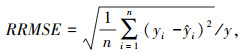
|
(15) |
|
(16) |
|
(17) |
式中,n为样本数量;yi为重构轨迹数据值;$\hat{y}_i$为初始轨迹数据值;y为初始轨迹数据值的平均值;a为加速度;da/dt为加速度的导数。
RRMSE用于衡量重构轨迹与原始轨迹之间的归一化均方根误差,对异常值较为敏感;RAE用于反映重构轨迹相对于原始轨迹的误差比例,对异常值敏感性较低。这两个指标的值越小,表明重构效果越好。利用这两个指标评估车辆81的重构轨迹在纵横向坐标特征上的保留程度,如表 2所示。
| 指标 | RRMSE值 | RAE值 |
| 横向坐标 | 0.010 57 | 0.000 46 |
| 纵向坐标 | 0.016 29 | 0.000 86 |
由表 2可知,RRMSE和RAE的值都较小,说明重构轨迹能够较好地捕捉原始轨迹的特征与动态走势,将误差保持在较低水平。另外,Jerk作为加速度的导数,能够反映加速度随时间变化情况,通过统计Jerk的最大值、最小值和Jerk值高于阈值±15 m/s3的百分比等来衡量轨迹数据重构的降噪效果,结果如表 3所示。
| 指标 | Jerk分析指标 | 原始轨迹 | 重构轨迹 |
| 横向 加速度 |
Jerk最大值/(m·s―3) | 552.68 | 32.65 |
| Jerk最小值/(m·s―3) | ―653.16 | ―32.78 | |
| Jerk> |15| m/s3的占比/% | 91.16 | 10.84 | |
| 纵向 加速度 |
Jerk最大值/(m·s―3) | 502.43 | 5.87 |
| Jerk最小值/(m·s―3) | ―452.19 | ―4.00 | |
| Jerk>|15| m/s3的占比/% | 88.35 | 0.00 |
从表 3可以看出,原始轨迹的纵横向加速度在3项Jerk分析指标上均超出物理约束,表明原始轨迹数据中存在大量噪声。重构轨迹在纵横加速度的3项Jerk分析指标都显著降低,其中横向加速度的Jerk分析指标基本在物理界限±15 m/s3范围内,仅有极少部分超过界限;纵向加速度数据Jerk均在物理界限范围内。通过Jerk指标的对比分析可知,车辆轨迹重构算法可以对轨迹数据进行有效降噪。
通过上述对比分析可知,本研究构建的多步轨迹重构方法显著提升了原始数据的精度,降低了降噪计算成本。分别对纵向和横向轨迹数据采用不同的降噪方法,使得噪声捕捉更为精准,重构效果得到有效提升。
3 结论针对现有方法缺乏对轨迹数据纵横向异质性的考虑,本研究提出了一种考虑轨迹数据纵横向异质性的多步轨迹重构方法,解决了现有方法在处理纵横向数据时可能出现的过拟合问题。选取81号车辆的轨迹数据进行重构以测试效果,得到如下结论:
(1) 通过小波变化和三次样条插值法分别对异常轨迹数据进行识别和局部重建,能够在保证原有轨迹的特征下,修正异常轨迹数据,但轨迹总体仍存在噪声。
(2) 分别利用对称指数移动平均法对纵向轨迹和Savitsky-Golay滤波对横向轨迹进行重构处理,可以在保留原有轨迹特征的基础上,更好抑制轨迹数据的剧烈抖动,提高轨迹数据的质量。
(3) 采用相对均方根误差和相对绝对误差量化重构轨迹对原始轨迹特征的保留程度,采用Jerk分析验证轨迹重构的降噪效果,结果表明重构轨迹与原始轨迹纵横坐标的RRMSE值和RAE值都较低,重构轨迹能够在整体上准确地捕捉原始轨迹的特征与动态走势,将误差保持在较小的水平。
综上,本研究提出的多步重构方法在处理轨迹数据的纵横向异质性时表现出了优越的性能。通过重新计算交通参数并采用不同的降噪方法,该方法能够更加精准地捕捉并处理轨迹数据中的噪声,有效提升了数据质量。这一方法为车辆轨迹数据的重构和降噪提供了新的思路,能够为交通模拟、车辆行为分析等领域的应用提供更加可靠的数据支持。
| [1] |
JANG J, JO Y, SHIN M, et al. Camera orientation estimation using motion-based vanishing point detection for advanced driver-assistance systems[J].
IEEE Transactions on Intelligent Transportation Systems, 2021, 22(10): 6286-6296.
DOI:10.1109/TITS.2020.2990983 |
| [2] |
齐龙, 郝艳军, 徐婷, 等. 多车道高速合流区车辆换道识别及轨迹分析[J]. 公路交通科技, 2024, 41(2): 173-181. QI Long, HAO Yanjun, XU Ting, et al. Lane changing identification and trajectory analysis in confluence areas of multi-lane expressways[J]. Journal of Highway and Transportation Research and Development, 2024, 41(2): 173-181. DOI:10.3969/j.issn.1002-0268.2024.02.018 |
| [3] |
马军, 刘大海, 薛梦婕, 等. 基于车辆跟踪的高速公路全天候违停检测算法[J]. 公路交通科技, 2024, 41(11): 78-85. MA Jun, LIU Dahai, XUE Mengjie, et al. Expressway all-weather illegal parking detection algorithm based on vehicle tracking[J]. Journal of Highway and Transportation Research and Development, 2024, 41(11): 78-85. DOI:10.3969/j.issn.1002-0268.2024.11.009 |
| [4] |
CHEN X Q, LIN Z B, YANG Y S, et al. High-resolution vehicle trajectory extraction and denoising from aerial videos[J].
IEEE Transactions on Intelligent Transportation Systems, 2021, 22(5): 3190-3202.
DOI:10.1109/TITS.2020.3003782 |
| [5] |
张玺君, 袁占亭, 张红, 等. 交通轨迹大数据预处理方法研究[J]. 计算机工程, 2019, 45(6): 26-31. ZHANG Xinjun, YUAN Zhanting, ZHANG Hong, et al. Research on pre-processing methods for traffic trajectory dig data[J]. Computer Engineering, 2019, 45(6): 26-31. |
| [6] |
VENTHURUTHIYIL S P, CHUNCHU M. Rajectory reconstruction using locally weighted regression: A new methodology to identify the optimum window size and polynomial order[J].
Transportmetrica A: Transport Science, 2018, 14(10): 881-900.
DOI:10.1080/23249935.2018.1449032 |
| [7] |
李俊彦, 宋焕生, 张朝阳, 等. 基于视频的多目标车辆跟踪及轨迹优化[J]. 计算机工程与应用, 2020, 56(5): 194-199. LI Junyan, SONG Huansheng, ZHANG Chaoyang, et al. Multi-objective vehicle tracking and trajectory optimization based on video[J]. Computer Engineering and Applications, 2020, 56(5): 194-199. |
| [8] |
WEI L, WANG Y P, CHEN P. A particle filter-based approach for vehicle trajectory reconstruction using sparse probe data[J].
IEEE Transactions on Intelligent Transportation Systems, 2020, 22(5): 2878-2890.
|
| [9] |
赵庶旭, 屈睿涛, 王婧雯. 基于改进的反距离权重插值的车辆轨迹重构方法[J]. 公路交通科技, 2018, 35(10): 133-139. ZHAO Shuxu, QU Ruitao, WANG Jingwen. A vehicle trajectory reconstruction method based on improved inverse distance weight interpolation[J]. Journal of Highway and Transportation Research and Development, 2018, 35(10): 133-139. DOI:10.3969/j.issn.1002-0268.2018.10.018 |
| [10] |
唐进君, 王凯, 叶峻青. 基于多准则粒子滤波算法的车辆轨迹重构[J]. 铁道科学与工程学报, 2022, 19(8): 2407-2416. TANG Jinjun, WANG Kai, YE Junqing. Vehicle trajectory reconstruction based on multi-criteria particle filtering algorithm[J]. Journal of Railway Science and Engineering, 2022, 19(8): 2407-2416. |
| [11] |
DONG S X, ZHOU Y, CHEN T Y, et al. An integrated empirical mode decomposition and butterworth filter based vehicle trajectory reconstruction method[J].
Physica A: Statistical Mechanics and its Applications, 2021, 583: 126295.
DOI:10.1016/j.physa.2021.126295 |
| [12] |
XIE X, VAN L H, VERBRAECK A. A generic data assimilation framework for vehicle trajectory reconstruction on signalized urban arterials using particle filters[J].
Transportation Research Part C: Emerging Technologies, 2018, 92: 364-391.
|
| [13] |
张玉虎, 郑皎凌, 蒲良, 等. 卡口数据驱动的车辆轨迹重构方法研究[J]. 重庆理工大学学报(自然科学版), 2022, 36(8): 193-202. ZHANG Yuhu, ZHENG Jiaoling, PU Liang, et al. A general dynamic sequential learning framework for vehicle trajectory reconstruction using automatic vehicle location or identification data[J]. Journal of Chongqing University of Technology: Natural Science, 2022, 36(8): 193-202. |
| [14] |
WANG Y P, AN C C, OU J S, et al. A general dynamic sequential learning framework for vehicle trajectory reconstruction using automatic vehicle location or identification data[J].
Physica A: Statistical Mechanics and its Applications, 2022, 608: 128243.
DOI:10.1016/j.physa.2022.128243 |
| [15] |
杨涛, 马玉琴, 刘梦, 等. 智能网联环境下信号交叉口车辆轨迹重构模型[J]. 西南交通大学学报, 2024, 59(5): 1148-1157. YANG Tao, MA Yuqin, LIU Meng, et al. Vehicle trajectory reconstruction model of signalized intersection in connected automated environments[J]. Journal of Southwest Jiaotong University, 2024, 59(5): 1148-1157. |
| [16] |
肖竹, 钱鑫, 蒋洪波, 等. 基于双向RNN的私家车轨迹重构算法[J]. 通信学报, 2020, 41(12): 171-181. XIAO Zhu, QIAN Xin, JIANG Hongbo, et al. Bidirectional RNN-based private car trajectory reconstruction algorithm[J]. Journal of Communications, 2020, 41(12): 171-181. |
| [17] |
FARD M R, MOHAYMANY A S, SHAHRI M. A new methodology for vehicle trajectory reconstruction based on wavelet analysis[J].
Transportation Research Part C: Emerging Technologies, 2017, 74: 150-167.
|
| [18] |
VENTHURUTHIYIL S P, CHUNCHU M. Vehicle path reconstruction using recursively ensembled low-pass filter (RELP) and adaptive tri-cubic kernel smoother[J].
Transportation Research Part C: Emerging Technologies, 2020, 120: 102847.
|
| [19] |
丁深圳, 陈旭梅, 傅泽新, 等. 协同自适应巡航控制环境下车辆轨迹数据重构方法[J]. 公路交通科技, 2023, 40(8): 154-162. DING Shenzhen, CHEN Xunmei, FU Zexin, et al. A method for vehicle trajectory data reconstruction in cooperative adaptive cruise control environment[J]. Journal of Highway and Transportation Research and Development, 2023, 40(8): 154-162. DOI:10.3969/j.issn.1002-0268.2023.08.021 |
| [20] |
ZHAO J, YANG X, ZHANG C. Vehicle trajectory reconstruction for intersections: An integrated wavelet transform and Savitzky-Golay filter approach[J].
Transportmetrica A: Transport Science, 2024, 20(2): 1-24.
|
| [21] |
MONTANINO M, PUNZO V. Trajectory data reconstruction and simulation-based validation against macroscopic traffic patterns[J].
Transportation Research Part B: Methodological, 2015, 80: 82-106.
|
| [22] |
CHEN S, CHENG K, YANG J, et al. Driving behavior risk measurement and cluster analysis driven by vehicle trajectory data[J].
Applied Sciences, 2023, 13(9): 5675.
|
| [23] |
THIEMANN C, TREIBER M, KESTING A. Estimating acceleration and lane-changing dynamics from next generation simulation trajectory data[J].
Transportation Research Record, 2008, 2088(1): 90-101.
|