 2025, Vol. 42
2025, Vol. 42扩展功能
文章信息
- 韩钰波, 徐菱, 杨国勇, 邱杨.
- HAN Yubo, XU Ling, YANG Guoyong, QIU Yang
- 考虑停车时长的区域停车泊位分配模型
- Regional berth allocation model considering parking duration
- 公路交通科技, 2025, 42(5): 26-35
- Journal of Highway and Transportation Research and Denelopment, 2025, 42(5): 26-35
- 10.3969/j.issn.1002-0268.2025.05.003
-
文章历史
- 收稿日期: 2023-05-30




 ,
, 2. 成都西南交通大学 设计研究院有限公司, 四川 成都 610031
2. Southwest Jiaotong University Chengdu Design Institute Co., Ltd., Chengdu, Sichuan 610031, China
由于机动车数量逐步增加及土地资源限制规划,城市中心区域车辆停放问题日益凸显。2021年国家发展改革委等部门发布的《发改委等部门关于推动城市停车设施发展意见的通知》指出,虽然中国城市停车设施在近年来持续完善,但仍存在供给能力短缺与治理水平低下等问题,且其建设管理关乎现代城市的发展和人民美好生活需要的实现。因此,缓解停车设施供需矛盾,加强城市停车管理,改善城市停车环境刻不容缓。据《住房城乡建设部关于加强城市停车设施管理的通知》显示,现存城市停车设施存在“重建设、轻管理”的问题,有效的停车设施得不到高效利用。如在交通高峰期,由于没有相宜的诱导信息,车辆在停车场内常常因无效寻泊而更换停车场,即驾驶员通常需要耗费大量时间来寻找合适的停车位[1]。此外,出入停车场的车辆也会增加路网交通量,进而加剧交通拥堵及空气污染等与交通相关的问题[2]。由此可知,采用合适的停车管理与控制手段,提高停车资源的利用效率,是缓解此类问题的重要解决思路。
为缓解因车辆寻泊引起的交通问题,平衡区域停车资源,学者们围绕停车需求的分配诱导方面展开大量研究,并取得了一些有益的成果。针对停车诱导方法的研究[3],需要解决的问题可归结为:停车成本最小化[4-5]、停车资源利用均衡[6]、用户成本平衡[7]及驾驶员偏好对停车行为的影响[8]等内容。同时多种研究方法也被运用到分配模型构建中,如林小围[9]运用合作博弈理论改进非合作停车博弈纳什均衡问题,通过形成车辆联盟解决停车总成本最小的车位分配问题。Yu[10]提出基于多属性决策的最佳停车位选择模型,完成驾驶员停车成本最优的目标,并采用综合指标验证其可行性。此外,针对解决多目标的停车分配问题,何胜学[11]在停车需求给定的条件下,以停车分布与期望差值最小和用户均衡分配为目标建立停车设施分配双层规划模型,实现停车需求分布及道路交通流量的均衡。Leurent[12]建立包含区域路网的停车供需模型,以静态环境中流量均衡条件为基础,研究停车场占用率及路线选择成本对停车场决策的影响。段满珍[13]基于对驾驶员停车倾向的研究,以区域内停车场空闲率均衡和驾驶员步行距离最小为目标建立了停车场分配模型。
还有部分学者关注于驾驶员心理意愿层面的停车诱导研究,例如,季彦婕[14]运用灰熵的思想设计最优泊位选择模型,研究在泊位选择时驾驶员所考虑的主要因素,并将场内泊位分配转换为多属性决策问题。刘婧[15]在抽样调查的基础上分析停车寻位时间影响因素,并构建停车寻位时间多项Logit模型,以模拟驾驶员在不同场景下寻找车位过程。卢凯[16]提出考虑驾驶员心理意愿的虚拟停车成本计算方法,并以步行距离、停车费用最小化为目标建立停车位动态分配诱导模型,有效减少了停车寻泊成本。Chaniotakis[17]建立停车位选择模型,在设置驾驶员停车选择偏好试验的基础上,研究偏好的异质性及不确定停车可用性对停车位置选择的影响。
通过对现有研究分析可知,多数文献在进行停车诱导时,偏向于关注停车场的占用率或道路网络流量均衡,但是针对在目的地确定及停车时长可预估情形下多个驾驶员的区域最优停车泊位分配问题,尚未有学者对此深入探讨。鉴于此,本研究创新性地考虑区域内多个停车场的泊位均衡分配,引入泊位停放属性值用以刻画停车场内不同泊位停车过程的便利程度,进而结合车辆预计停放时间设置车辆停放指标(即停车时长指数)。根据管理平台与驾驶员的泊位选择目标与层次关系,建立区域停车泊位分配双层规划模型,并综合探讨在已知路网建筑基本信息与驾驶员需求信息的情况下,多个停车需求的优化分配效果,及不同优化目标函数对分配结果的影响,分别说明只考虑单一目标的不足之处,验证了提供最优分配方案对区域停车诱导的优势。
1 区域停车泊位分配模型 1.1 基本假设(1) 出于步行时间考虑,驾驶员在选择停车场时存在一个可接受的最大步行距离,所以将目的地附近一定范围内的区域设置为诱导区域,超出目的地诱导区域范围的停车场将被限制分配[5]。诱导区域内驾车到达不同停车场的行驶时间相差较小,与场外驾车总时间相比基本可以忽略不计,故假设在某一较短时间段内申请停车诱导的驾驶员同时到达诱导区域,且到达不同停车场的行驶时间相同。
(2) 管理平台汇集了各停车场的车位实时占用信息,并在接收分配信号后对车位进行一段时间的保留。
(3) 每位驾驶员在发出停车需求中提供自己的出行目的地和预估停车时长,假设他们在提交需求信息时都充分考虑自身的出行计划,预留适当缓冲时间,严格遵守提交系统的时间信息,并在泊位分配后一定会接受平台诱导建议,前往目标停车泊位。
1.2 符号说明本研究构建模型所使用到符号变量如表 1所示。
| 符号 | 定义 | |
| 集合 | I | 分配周期内请求泊位分配的驾驶员集合,I=(1, 2, …, i, …, Q) |
| J | 诱导区域内停车场的集合,J=(1, 2, …, j, …, N) | |
| D | 驾驶员所到目的地的集合,D=(1, 2, …, d, …, M) | |
| Kj | 第j个停车场停车泊位的集合,Kj=(1, 2, …, k, …, Nj) | |
| ΔT | 停车泊位进行一次分配的时间周期,即将停车泊位诱导分配的时间段分割为若干相等的较短时间周期,每个周期内发出停车需求的驾驶员统一分配 | |
| R | 停车诱导区域的半径 | |
| oi | 驾驶员i的预计车辆停放时长 | |
| 参数 | Md | 去往第d个目的地的请求停车数量 |
| Nj | 第j个停车场停车泊位的数量 | |
| Ljd | 第j个停车场到第d个目的地的距离,取所有路径中的最短距离 | |
| ljk(inlet) | 第j个停车场内第k个停车泊位距离停车场入口的距离,取所有路径中的最短距离 | |
| l(exit)jk | 第j个停车场内第k个停车泊位距离停车场人行出口(一般为电梯口)的距离,取所有路径中的最短距离 | |
| Sjk | 第j个停车场内第k个泊位距离停车场入口的转弯数量,取到达的最小值 | |
| 变量 | xijk | 驾驶员i选择属于停车场j的停车泊位k时的决策变量 |
| Xijk | 驾驶员选择停车泊位的决策集 | |
1.3 基本定义
构建区域停车泊位分配模型时,应充分考虑停车管理平台匹配泊位的规划目标和驾驶员选择泊位的心理意愿,通过对已有研究的总结[13-14],结合本研究所需模型期望达到的效果,确定将停车时长指数与驾驶员停车消耗时间作为泊位分配的关键影响因素。
1.3.1 停放参数(1) 停放属性值
定义停车场j内停车泊位k的停放便利程度量化值为停放属性值Ajk,其取值大小主要受到停车泊位至入口的距离,停车泊位至人行出口的距离与转弯数3个主要因素的影响。此外,设定停放属性值与各个影响因素数值均呈现正相关,其取值越大意味着停车便利性越低。停放属性值的计算式为:

|
(1) |
式中,rk1,rk2,rk3分别为停车泊位k标准化后的决策矩阵值;w1,w2,w3分别为停车泊位距离入口的距离,停车泊位距离电梯口的距离和转弯数的权重值,可采用熵值法进行标定。
(2) 停车时长指数
驾驶员i的停车时长指数Yijk的定义为车辆停放时长oi与停放属性值Ajk的比值,即$Y_{i j k}=\frac{o_i}{A_{j k}}$,与驾驶员i的预计停车时间及停车泊位停放便利程度相关。一般来说,车辆停放时间越长,停车过程越便利,对应的停车时长指数值会越大。
1.3.2 驾驶员停车耗费时间对于存在两个以上目的地临近且目的地诱导区域有多个停车场的情况,车辆进入诱导区域后可以选择区域内的任何一个停车场进行停车,但每个停车场至不同目的地的距离不同,即停车后步行时间也有所差别,所以管理员在进行泊位诱导时应综合考虑车辆进入诱导区域后停入泊位消耗的时间与驾驶员从泊位步行到目的地所用时间。
(1) 从停车场入口到目标泊位所用的时间
|
(2) |
式中,tB, ijk为驾驶员i在停车场j内行驶至停车位k的行程时间;va为驾驶员在停车场内的行驶速度,取5 km/h;ts为单个弯道的附加效用时间。
(2) 停车入位时间:停车者将车辆停入到泊位所用的时间。从车辆到达泊位开始到车辆完全停入泊位,受空闲泊位两侧的停车环境的影响,有以下5种情况, 即两侧泊位都空闲、一侧为建筑物一侧泊位空闲、一侧泊位空闲一侧泊位被占用、一侧为建筑物一侧泊位被占用、两侧泊位都被占用。对停车难度进行量化,量化值与停车难度成正相关,具体情况如图 1所示,第1层是泊位占用情况,阴影代表被量化的泊位;第2层为停车难度量化值。
|
(3) |

|
| 图 1 停车难度赋值 Fig. 1 Parking difficulty assignment |
| |
式中,tP, ijk为停车入位时间;α为停车时间转换系数;p为停车难度量化指标。
(3) 场内步行时间:指驾驶员从停车泊位到达停车场人行出口所用的时间,地面停车场的驾驶员人行出口为车辆出口,地下停车场的驾驶员人行出口为电梯间,同时不考虑驾驶员在电梯内的行走及电梯等候和运行时间。
|
(4) |
式中,tR, ijk为驾驶员i在停车场j从停车泊位k步行至停车场出口的步行时间;vb为驾驶员的步行速度;一般取平均值1 m/s。
(4) 停车场到目的地的步行时间

|
(5) |
式中,tD, ijk为驾驶员i从停车场j步行至目的地D的步行时间。
综上可知,驾驶员i的停车耗费时间可以计算为:

|
(6) |
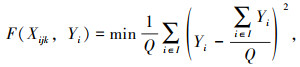
在停车场的所有空闲停车泊位中,靠近出入口且车辆到达的最佳路线较少转弯(泊位的停放属性值较小)时,易于停入车辆且停车入位花费时间较少,驾驶员也对其有更高的停车需求。停放时长是在车辆入位时可变的一种属性,驾驶员在停车时可根据出行目的进行时间范围预估[18]。若对不同停放时长的车辆进行无差别泊位分配,则可能会出现长时停放车辆占用停放属性值较小的泊位,导致后续短时停放车辆花费更多的入位时间,而短时停放车辆的更新频率较大,这样将会造成整体停车耗费时间增多以及停车场内部车辆运行混乱。而当驾驶员出行目的地诱导区域内存在停车场占用率过高时,停车管理平台通常会制订泊位均衡利用管控措施,诱导车辆前往目标停车泊位。对于管理平台来说,更倾向于将短时停放车辆诱导至停放属性值较小的泊位,将长时停放车辆诱导至停放属性值较大的泊位,以提高停车泊位的利用率和周转率,缓解停车场内部混乱的运行情况,从而达到停车场良好的管理效果。根据以上设定建立上层规划模型为:
|
(7) |

|
(8) |

|
(9) |

|
(10) |
建立以驾驶员总的停车耗费时间最短为目标的下层规划模型:

|
(11) |

|
(12) |
|
(13) |
|
(14) |
|
(15) |
在双层规划模型中,式(7)为上层规划模型的目标函数,表示平台为提出请求的Q名驾驶员分配停车泊位的停车时长指数差值应尽量小,以保证停车位置分布尽量均衡。式(8)为分配方案中驾驶员停车时长指数应满足的计算式。式(9)为对于提出申请的任一驾驶员,其预计停车时长应大于0。式(10)为分配方案中目的地的诱导范围约束。式(11)为下层规划模型的目标函数,表示提出请求的Q名驾驶员接受系统分配的停车诱导,实现停车耗费总时间最短,反映了下层决策者的最大受益。式(12)为决策变量xijk=1或0,xijk=1表示驾驶员i分配到停车场j的停车泊位k,xijk=0表示驾驶员i没有分配到停车场j的停车泊位k。式(13)为系统分配的停车泊位数等于去往各目的地的请求停车数量总和。式(14)为每个停车泊位最多可分配给一个驾驶员。式(15)为每个驾驶员被分配到的泊位数有且只有一个。
2 模型算法设计考虑到本研究所提的双层规划模型是典型的NP-hard问题,为此本章将采用粒子群优化(Particle Swarm Optimization,PSO)算法完成对模型的求解。粒子群算法具有群体智能、迭代格式简单、占用内存空间小及可快速收敛到最优解所在的区域等优点[19],在求解大规模问题尤其是NP-hard问题等方面得到广泛应用。具体算法步骤为:
Step 1停车数据初始化。根据停车场提供的基本位置信息,计算各停车场泊位停放属性值Ajk。通过停车场分配平台,获取实时泊位占用情况;根据平台中接收的请求停车数据,记录当前所需泊位分配车辆所有的停车时长信息。
Step 2利用粒子群算法求解下层规划的最优解 
Step 2.1粒子群初始化及更新函数修改。对粒子群个数C、每个粒子的位置Xz和速度Vz进行初始化赋值,并令迭代次数t=1。其中,假设每一个粒子的位置对应一个发出需求的驾驶员可选停车泊位决策集,粒子的每一维取值代表驾驶员选择的决策变量,根据上文定义被限定为0-1整数变量。因此可将泊位分配模型的方案优化过程转换为求解0-1整数规划问题,为保证粒子位置更新值符合限定条件,调用Sigmoid函数对粒子速度进行处理[20],从而将PSO算法的位置更新函数修改为:

|
(16) |
式中,Xz(ijk)(t)为迭代次数为t时第z个粒子的位置向量;Vz(ijk)(t)为迭代次数为t时第z个粒子的速度向量,
Step 2.2适应度值评价。采用惩罚函数对下层规划的等式约束(式(12)、式(13)、式(15))和不等式约束(式(14)) 进行处理,并结合目标函数(式(11))构成粒子的适应度函数,进而运用适应度函数计算每个粒子的适应度值f(Xz(ijk)(t))。
Step 2.3个体最优位置更新。比较每一个粒子当前的适应度值f(Xz(ijk)(t))和其个体最优值f(Pbestz(t)),若适应度值优于个体最优值,则将个体最优Pbestz(t)替换为Xz(ijk)(t)。
Step 2.4全局最优位置更新。比较粒子当前的个体最优值f(Pbestz(t))和全局最优值f(Gbestz(t)),若个体最优值优于全局最优值,则将全局最优Gbestz(t)替换为Pbestz(t)。
Step 2.5粒子更新。为兼顾PSO算法的收敛速度和收敛精度,借助时变思想运用随粒子位置迭代而线性递减的方式计算惯性权重和学习因子[14],进而更新粒子速度,结合Sigmoid函数对粒子位置进行更新。
Step 2.6判断结束条件。令t=t+1,若满足结束条件,退出程序并输出初始最优泊位分配方案;若不满足结束条件,返回Step 2.2。
Step 3求解上层规划的最优解。将泊位分配方案代入上层规划目标函数中,根据停车驾驶员的停车时长oi和停车属性值Ajk计算停车时长指数Yijk,进而基于约束条件计算上层规划目标函数值,若其优于最优分配方案,则更新当前方案,同理 
Step 4判断算法结束条件。判断目标函数值是否满足预期目标或达到迭代次数,若满足转到Step 5,否则根据目标函数值的差异程度重新调整上层决策方案,给出新的分配方案Xijk,返回Step 3继续计算。
Step 5给出符合条件的最优分配方案,算法结束。
具体求解流程图如图 2所示。

|
| 图 2 模型求解流程 Fig. 2 Model solution flow |
| |
3 算例分析 3.1 算例设计
现考虑某一区域具有6个停车吸引目的地D1~D6,诱导区域半径R=350 m,其中存在8个停车设施,其位置示意图如图 3所示。驾驶员在进入诱导区域后,根据系统分配信息将车辆停入对应停车泊位中。定义A,B,C这3种布局形式的停车设施,其中A, C为地下停车场,B为地面停车场,已知停车场基本配置信息如表 2所示,泊位分配时间周期ΔT=3 min,在ΔT初始时刻各布局形式的停车场空闲泊位分布情况如图 4所示。由于篇幅限制,假设在ΔT初始时刻停车场A1~A2,B1~B3,C1~C3分别与上述的3种停车设施A,B,C有相同的停车场类型及空闲泊位分布情况,各目的地与各停车场的距离如表 3所示。

|
| 图 3 道路网络示意图 Fig. 3 Schematic diagram of road network |
| |
| 停车场 | 进口数 | 出口数 | 电梯数 | 总泊位数 | 空闲泊位数 |
| A | 1 | 1 | 4 | 170 | 18 |
| B | 1 | 1 | 0 | 131 | 12 |
| C | 1 | 1 | 6 | 316 | 20 |

|
| 图 4 停车场泊位分布示意图 Fig. 4 Schematic diagrams of berth distribution in parking lots |
| |
| 目的地编号 | 停车场编号 | |||||||
| A1 | A2 | B1 | B2 | B3 | C1 | C2 | C3 | |
| D1 | 176 | 973 | 156 | 550 | 1195 | 78 | 356 | 1 092 |
| D2 | 351 | 742 | 242 | 252 | 482 | 196 | 355 | 462 |
| D3 | 969 | 786 | 685 | 374 | 88 | 691 | 751 | 32 |
| D4 | 69 | 1 117 | 459 | 605 | 1 106 | 332 | 357 | 987 |
| D5 | 263 | 553 | 395 | 147 | 823 | 139 | 81 | 653 |
| D6 | 892 | 349 | 773 | 336 | 556 | 605 | 536 | 273 |
车辆在停车场内的行驶速度为5 km/h≈1.4 m/s,由于停车场内空间有限故按车辆最小转弯半径计算单个弯道的附加效用时间ts,汽车长度取4 m,由简单经验公式计算可得最小转弯半径为rmin=9.6 m,车辆方向最大转角取90°,计算可得ts=11 s。
假设在ΔT内有6位驾驶员(编号为1~6)分别前往停车吸引目的地D1~D6,其预计停车时长为2, 2, 4,4,6,6 h,在系统发布泊位分配信息后,每位驾驶员前往目标停车泊位时偏向于选择最优行驶路径,且行驶过程中不会被其他车辆所影响。
3.2 区域泊位分配结果粒子群算法的相关参数设定为:粒子群规模C=30,最大迭代次数Tmax=100,最大速度Vmax=6,每一个粒子的初始速度Vz(ijk)(1)=Vmaxrand,初始位置Xz(ijk)(1)=round(rand)。利用Matlab软件编写算法程序对优化模型进行初始解计算,可以得到不同停车诱导方案的驾驶员停车耗费总时间最小值(下层规划目标值)及相应的停车时长指数方差(上层目标函数值),PSO算法收敛迭代图如图 5所示,泊位分配方案的优化结果如表 4所示。

|
| 图 5 PSO算法收敛迭代图 Fig. 5 Graph of convergence iteration with PSO algorithm |
| |
| 泊位分配结果 | 停车场 | 泊位编号 | 泊位分配结果 | 停车场 | 泊位编号 | |
| 车辆1 | C1 | P10 | 车辆4 | A1 | P6 | |
| 车辆2 | B1 | P5 | 车辆5 | C2 | P10 | |
| 车辆3 | B3 | P5 | 车辆6 | A2 | P6 | |
| 上层目标函数值 | 82.4 | 下层目标函数值/s | 1 278 | |||
由图 5可知,在算法迭代次数达到30次左右时,适应度函数趋于稳定状态。进一步,对本研究提出的模型算法所求得的最优方案与应用遍历法求解所得方案(如表 4所示)进行对比,可知最终结果一致,证明该算法不仅可以有效计算上文构建模型而且存在良好的收敛速度及求解效率。
对照表 3和表 4可知,对于接收到的所有停车请求,存在得到诱导范围内所有停车泊位分配方案的可能性。以车辆3为例,当缺少考虑停车时长的均衡分配方案引导时,驾驶员出于自身利益角度,会选择至其目的地D3场外步行距离较近的停车场C3,此时上层规划函数值计算可得为100,明显高于最优分配方案结果。通过增加区域泊位占用均衡的目标函数,限制车辆停放位置要求,进而影响分配平台对不同目的地停车需求的调控和泊位诱导,使不同停车时长的车辆占用泊位情况尽可能均等分布。
总的来说,本研究提出的双层规划模型可进行有效的停车泊位诱导,实现驾驶员在停车过程中消耗时间最短的决策者最大受益目标及区域停车场协调管理的系统最大受益目标。针对诱导区域内存在多个停车场的情况,并非单纯将驾驶员分配到与目的地距离最近的停车场,而是兼顾场内不同泊位的停车消耗时间差异,依据车辆的预计停放时长考虑区域内所有空闲泊位统筹分配,将停放时长较短的车辆诱导至停车过程较便利的泊位,进而提高上述泊位的周转率和利用率,对区域内停车场泊位占用情况进行均衡管理。
3.3 优化目标函数对结果影响分析本小节研究了设置上下层规划函数对泊位分配结果的影响,在其他约束条件不变只优化单一目标函数情况下,进行新的泊位分配方案计算,并与上文所构建的双层规划模型计算所得方案进行对比分析,得到结果如图 6所示。

|
| 图 6 优化单一目标函数与优化双层规划对比 Fig. 6 Optimizing single objective function v.s. optimizing bi-level programming |
| |
由图 6可以看出:
(1) 在优化双层规划时,随着驾驶员请求数量的增加,停车消耗总时间的增加量呈现振荡现象,原因是各驾驶员发出的停车请求存在不同到达目的地,故其最优分配方案所对应的停车消耗时间存在差异,这与实际情况相符;停车时长指数方差在接收的请求数量少时增长较快,后续逐渐平稳,其原因在于驾驶员请求数量越多分配方案的场内空闲泊位协调效果越明显。
(2) 在仅优化下层规划目标函数时,驾驶员停车消耗总时间增量与优化双层规划相比变化幅度非常小,原因在于利用双层规划模型求解的过程中,通过粒子群算法求解下层规划确定初始泊位分配方案,根据算法流程,最终分配方案是在此基础上进一步优化所得,故两种优化目标计算结果的差值相比于请求数量增加带来的停车消耗总时间增量微乎其微,在图中难以体现。但是,停车时长指数方差增长程度较大,随着停车需求的扩大,只优化下层目标函数产生的影响逐渐减小,说明若平台只考虑驾驶员利益进行泊位分配将会导致区域泊位占用情况不均衡,后续可能出现短时停放车辆频繁停入场内停放属性值较大泊位的情况,进而造成停车场内部运行混乱,不利于区域停车场的系统管理。
(3) 在只优化上层目标函数时,虽然停车时长指数趋于稳定状态,但驾驶员停车消耗总时间增加量整体大于优化双层规划所得结果,这说明若平台只考虑区域泊位占用整体均衡,会对驾驶员利益产生损害,在实际情景下容易造成驾驶员拒绝平台引导方案自行选择停车位的结果。
3.4 泊位分配规则对结果影响分析在上述研究中,平台以诱导区域为范围限制条件,确定驾驶员可选空闲泊位集,设计综合考虑驾驶员选择因素与区域整体均衡的分配规则进行泊位分配。但在实际情况下,鉴于驾驶员的直观感受及所得资源信息匮乏,其更倾向于选择与所到目的地距离最近的停车场,无法在缺少平台分配信息引导的情况下,将车辆停放至可接受步行距离范围内的其他停车场。下文以限制车辆只能就近停放作为基准对比方案分配规则,与本研究提出的分配模型进行对比分析。由于车辆驾驶员总是希望停车过程花费较短的时间,假设其会选择场内停车消耗时间最短的泊位停放车辆,通过计算,得到不同驾驶员请求规模下限制车辆就近停放(对比方案)与设置诱导区域范围(原模型方案)时泊位分配方案的结果对比,如图 7所示。

|
| 图 7 限制车辆就近停放与设置诱导区域的结果对比 Fig. 7 Restricting vehicles parking nearby v.s. setting guidance area |
| |
由图 7可以看出,与无引导信息情况下车辆就近停放方式相比,设置诱导区域范围虽然在请求泊位分配需求较少时总停车耗费时间节省较少,但随着请求数量增加总时间的差值会越来越大,且区域占用泊位的分布情况更加均匀,不会出现因长时停放车辆占用外部停车便利程度较高的泊位,而导致短时停放车辆频繁进出停车场内部造成场内交通运行混乱的情况。虽然原方案与对比方案的方差变动趋势相似,但优化程度在可接受范围内,这说明设置目的地诱导区域能在一定程度上满足平台对区域内空闲泊位的统筹管理,实现优化停车场运行状态的目标。
4 结论本研究探讨了区域内多停车场停车泊位的系统分配问题,根据以往的研究成果分析,增加车辆停放时长为另一影响泊位分配的因素。从管理者角度出发使停车场内不同位置的泊位占用情况均衡,并考虑所有请求泊位分配的驾驶员停车过程耗费总时间最短,建立了可预估停车时长情况下区域泊位分配的双层优化模型,研究了目标函数、分配规则对泊位分配结果的影响,主要结论如下。
(1) 停车管理平台运用考虑车辆停放时长的泊位分配方法,在兼顾驾驶员时间效益的同时,可以有效提高停车便利泊位的利用性。
(2) 如果仅以驾驶员停车耗费总时间最短为优化目标,驾驶员的时间效率最高,但停车时长指数波动较大,存在后续高峰时段场内车辆运行混乱的可能;而仅以区域泊位占用分布均衡为优化目标,则可能导致驾驶员对分配方案的接受率下降。
(3) 对比无诱导信息的驾驶员选择方案,所建模型可实现驾驶员停车耗费时间与区域泊位占用位置均衡同时优化,随着停车需求增加,停车耗费时间增加量的差值比率呈现上升趋势,而停车时长指数波动情况趋于稳定状态,两者间的差距在可接受优化范围内变动。
在本研究的基础上,可进一步深入的研究方向包括:基于共享停车平台的泊位分配、考虑超时停车的预约泊位分配以及考虑个体停车偏好的动态泊位分配等。
| [1] |
焦志强, 靳文舟, 郝小妮. 综合效益最优的路边停车价格研究[J]. 公路交通科技, 2017, 34(9): 109-115. JIAO Zhiqiang, JIN Wenzhou, HAO Xiaoni. Study on curbside parking price based on optimal comprehensive benefit[J]. Journal of Highway and Transportation Research and Development, 2017, 34(9): 109-115. DOI:10.3969/j.issn.1002-0268.2017.09.015 |
| [2] |
任姿蓉, 程琳, 杜明洋, 等. 考虑出行者到达时间无差异带的瓶颈模型[J]. 公路交通科技, 2024, 41(4): 194-203. REN Zirong, CHEN Lin, DU Mingyang, et al. A bottleneck model considering indifference-zone of traveler's arrival time[J]. Journal of Highway and Transportation Research and Development, 2024, 41(4): 194-203. DOI:10.3969/j.issn.1002-0268.2024.04.020 |
| [3] |
PEL A J, CHANIOTAKIS E. Stochastic user equilibrium traffic assignment with equilibrated parking search routes[J].
Transportation Research Part B: Methodological, 2017, 101: 123-139.
DOI:10.1016/j.trb.2017.03.015 |
| [4] |
王艳, 陈群. 多目的地多停车场系统动态停车分配模型[J]. 运筹与管理, 2021, 30(7): 119-127. WANG Yan, CHEN Qun. Dynamic parking allocation model in a multidestination multiple parking lot system[J]. Operations Research and Management Seience, 2021, 30(7): 119-127. |
| [5] |
何胜学. AVP条件下的共享停车供需匹配模型及自适应演化算法[J]. 公路交通科技, 2022, 39(3): 117-124. HE Shengxue. Shared parking demand-supply match model and self-adaptive evolutionary algorithm with autonomous valet parking[J]. Journal of Highway and Transportation Research and Development, 2022, 39(3): 117-124. DOI:10.3969/j.issn.1002-0268.2022.03.015 |
| [6] |
DU Y, YU S, MENG Q, et al. Allocation of street parking facilities in a capacitated network with equilibrium constraints on drivers' traveling and cruising for parking[J].
Transportation Research Part C: Emerging Technologies, 2019, 101: 181-207.
DOI:10.1016/j.trc.2019.02.015 |
| [7] |
陈群, 史峰, 姚加林, 等. 区域内停车场停车量分配优化[J]. 西南交通大学学报, 2009, 44(2): 280-283, 288. CHEN Qun, SHI Feng, YAO Jialin, et al. Bi-level programming model for parking assignment among parking lots in a local area[J]. Journal of Southwest Jiaotong University, 2009, 44(2): 280-283, 288. |
| [8] |
梁伟, 胡坚明, 张毅, 等. 基于个体偏好的停车泊位优选建模与实证分析[J]. 清华大学学报(自然科学版), 2017, 57(1): 100-106. LIANG Wei, HU Jianming, ZHANG Yi, et al. Modeling and empirical analyses of parking space choices based on individual preferences[J]. Journal of Tsinghua University (Science and Technology), 2017, 57(1): 100-106. |
| [9] |
林小围, 周晶, 卢珂, 等. 基于合作博弈的停车位分配模型[J]. 系统管理学报, 2019, 28(1): 62-66, 85. LIN Xiaowei, ZHOU Jing, LU Ke, et al. Parking slot assignment model based on cooperative game theory[J]. Journal of Systems & Management, 2019, 28(1): 62-66, 85. |
| [10] |
YU S Y, LI B P, ZHANG Q, et al. An optimal parking space search model based on fuzzy multiple attribute decision making[C]//Proceedings of the 10th World Congress on Intelligent Control and Automation. New York: IEEE, 2012: 4350-4355.
|
| [11] |
何胜学, 高蕾. 停车需求分布的双层规划模型及算法[J]. 交通运输系统工程与信息, 2019, 19(1): 83-88, 96. HE Shengxue, GAO Lei. Bi-level programming model and algorithm of parking demand distribution[J]. Journal of Transportation Systems Engineering and Information Technology, 2019, 19(1): 83-88, 96. |
| [12] |
LEURENT F, BOUJNAH H. A user equilibrium, traffic assignment model of network route and parking lot choice, with search circuits and cruising flows[J].
Transportation Research Part C: Emerging Technologies, 2014, 47: 28-46.
|
| [13] |
段满珍, 曹会云, 董博, 等. 面向个体需求的停车场分配模型[J]. 交通运输系统工程与信息, 2016, 16(6): 153-159. DUAN Manzhen, CAO Huiyun, DONG Bo, et al. Parking lots distribution model for the individual demand[J]. Journal of Transportation Systems Engineering and Information Technology, 2016, 16(6): 153-159. |
| [14] |
季彦婕, 王炜, 邓卫. 停车场内部泊车行为特性分析及最优泊位选择模型[J]. 东南大学学报(自然科学版), 2009, 39(2): 399-403. JI Yanjie, WANG Wei, DENG Wei. Micro-level paring behaviors within parking facilities and optimal parking space choice model[J]. Journal of Southeast University(Natural Science Edition), 2009, 39(2): 399-403. |
| [15] |
刘婧, 关宏志, 贺玉龙, 等. 大城市中心区停车寻位研究[J]. 公路交通科技, 2016, 33(1): 135-139. LIU Jing, GUAN Hongzhi, HE Yulong, et al. Research of searching for parking lot at big city center[J]. Journal of Highway and Transportation Research and Development, 2016, 33(1): 135-139. DOI:10.3969/j.issn.1002-0268.2016.01.021 |
| [16] |
卢凯, 林茂伟, 邓兴栋, 等. 停车总成本最小的停车位动态分配与诱导模型[J]. 华南理工大学学报(自然科学版), 2018, 46(9): 82-91, 98. LU Kai, LIN Maowei, DENG Xingdong, et al. A dynamic allocation and guidance model for parking spaces with minimum total parking costs[J]. Journal of South China University of Technology (Natural Science Edition), 2018, 46(9): 82-91, 98. |
| [17] |
CHANIOTAKIS E, PEL A J. Drivers' parking location choice under uncertain parking availability and search times: A stated preference experiment[J].
Transportation Research Part A: Policy and Practice, 2015, 82: 228-239.
|
| [18] |
李彬, 牛万龙, 胡纪龄, 等. 基于大数据分析的高速公路分车型拥堵态势评估[J]. 公路交通科技, 2024, 41(8): 40-54. LI Bin, NIU Wanlong, HU Jiling, et al. Expressway congestion state assessment due to different vehicle types based on big data[J]. Journal of Highway and Transportation Research and Development, 2024, 41(8): 40-54. DOI:10.3969/j.issn.1002-0268.2024.08.005 |
| [19] |
PEDERSEN M E H, CHIPPERFIELD A J. Simplifying particle swarm optimization[J].
Applied Soft Computing, 2010, 10(2): 618-628.
|
| [20] |
TIAN D P, ZHAO X F, SHI Z Z. Chaotic particle swarm optimization with sigmoid-based acceleration coefficients for numerical function optimization[J].
Swarm and Evolutionary Computation, 2019, 51: 100573.
DOI:10.1016/j.swevo.2019.100573 |