 2025, Vol. 42
2025, Vol. 42扩展功能
文章信息
- 陈宇峰, 游康祥, 王琰, 向郑涛, 周旭.
- CHEN Yufeng, YOU Kangxiang, WANG Yan, XIANG Zhengtao, ZHOU Xu
- 通信延迟对车联网交通流演化的影响
- Influence of communication delay on traffic flow evolution on Internet of vehicles
- 公路交通科技, 2025, 42(4): 17-23
- Journal of Highway and Transportation Research and Denelopment, 2025, 42(4): 17-23
- 10.3969/j.issn.1002-0268.2025.04.003
-
文章历史
- 收稿日期: 2023-10-27




 ,
, 2. 交通运输部公路科学研究院, 北京 100088
2. Research Institute of Highway, Ministry of Transport, Beijing 100088, China
随着全球经济快速发展和城市化进程加快,交通需求不断增大,汽车保有量急剧上升,交通拥堵、交通安全、交通污染等交通问题日益突出,严重影响人们出行效率[1-4]。传统交通控制和管理技术在缓解城市交通问题方面发挥的作用有限[5]。车联网(Internet of Vehicles,IOV)技术的兴起,使得智能交通系统(Intelligent Transport System,ITS)得到了迅速发展,为改善交通环境和推动可持续发展注入了新的机遇[6]。由于交通系统复杂度的不断提升,亟需加强ITS基础设施建设的同时还需要对交通流演化内在特性进行系统科学的研究,为ITS的建设和管理提供科学合理的解决方案[7]。
20世纪末,德国学者Kerner对德国高速公路大量实测交通数据进行分析,提出了三相交通流理论,将交通流细分为3种状态:自由流、同步流和宽运动堵塞,体现了交通流复杂的时空特性[8]。元胞自动机模型是一种重要的交通流微观模型,可以有效模拟交通流中车辆的微观运动状态。许多学者基于慢启动效应和前车速度效应对NS模型[9]不断改进,使其能够更好地模拟各种交通流现象。但这些模型在制定演化规则时都只考虑了自车和前车的速度和位置信息,并没有考虑获取更大范围内的交通信息,这些都受限于驾驶员的视觉感知范围。
在车联网环境中,驾驶员能够获取到车辆通信范围内的其他车辆速度、加速度、位置等重要交通信息,帮助驾驶员做出更好的决策,以提高驾驶安全性[10]。研究车联网环境下交通流建模具有重要意义和实用价值[11]。Zhao[12]考虑前车速度和刹车灯的影响,提出了十字路口车联网元胞自动机交通流模型,结果表明车辆速度提高,路口交通流量增加。Zhao[13]考虑联网车辆前后向控制的影响,提出了新的车联网元胞自动机交通流模型MVDE,并分析不同联网渗透率对交通流的影响,结果表明联网车辆比例越高,道路通行能力越好。蒋阳升[14]考虑智能网联车队队列行为特征,提出了智能网联车队混合异构交通流元胞自动机交通流模型,结果表明,车联网能提高车辆平均速度,缓解交通拥堵。Zhao[15]分析车联网环境下联网车辆和紧急车辆的特征,在刹车灯模型上进行改进,模拟结果表明,车联网能有效提高紧急车辆的通行速度。Wang[16]基于车辆历史交通信息记忆反馈信号,提出联网车辆和普通车辆异构车联网交通流模型,结果表明车辆记忆信息反馈信号强度一定程度上影响了交通流稳定性。张建旭[17]分析混有网联自动驾驶车辆和人工驾驶车辆的混合交通流在事故车辆影响下的交通流特征,结果表明当事故发生时,瓶颈区通行能力随自动驾驶车辆渗透率的增大而提升,车联网下事故预警机制能有效提高事故发生路段瓶颈区的通行能力。王正武[18]为提高网联混合交通流环境下高速公路基本路段通行能力,提出了一种网联自动驾驶车辆优先车道管理策略,仿真结果表明,网联自动驾驶车辆渗透率越高,道路通行能力越好。
上述车联网下的元胞自动机交通流模型都是在理想通信状态下建立的,默认车辆能准确感知到各种环境下的交通信息。但由于车辆节点的高移动性、拓扑结构的不断变化和外界环境干扰[19],容易引起通信链路的频繁断开。车辆之间通信存在的延迟问题[20]会使得车辆感知道路交通信息滞后,严重影响交通流稳定性。目前的研究考虑通信延迟对车联网交通流的影响研究还较少。因此,本研究主要开展通信延迟对车联网交通流演化的影响分析。
考虑联网车辆和普通车辆感知交通信息的差异性以及通信延迟对交通信息获取的影响,本研究在刹车灯模型[21]基础上,提出了车联网环境下考虑通信延迟影响的改进刹车灯模型,并分析了不同联网车辆渗透率下交通流的变化以及通信延迟对车联网交通流稳定性和演化复杂性的影响。结果表明:联网车辆渗透率的增加能有效提高车辆速度和道路通行能力;车联网通信延迟会导致车辆速度降低,交通流量下降,引起交通流状态从同步流向宽运动堵塞相变的临界密度值减小,交通流稳定性下降。
1 系统模型在联网车辆与普通车辆混合交通流中,考虑联网车辆可以通过车与车通信(Vehicle to Vehicle,V2V)进行信息共享,获取到更大范围的交通信息。联网车辆对交通环境的变化更敏感,可以避免不必要的加速和减速,交通流更稳定。而普通车辆只能通过视觉获取前车的行驶状态,因此联网车辆的期望间距要比普通车辆大,随机慢化概率和减速系数比普通车辆低。在联网车辆对交通信息获取时要考虑车联网通信延迟的影响,通信延迟对获取期望间距的影响如图 1所示。图 1(a)表示前车n+1与前前车n+2之间的实际间距为dn+1。图 1(b)表示车辆n对dn+1的获取受到通信延迟的影响,导致车辆感知的间距信息滞后,获取的间距变小,从而影响车辆n当前时步的速度更新。

|
| 图 1 通信延迟对获取期望间距的影响 Fig. 1 Influence of communication delay on obtaining desired headway |
| |
基于上述考虑,本研究在Xiang模型的基础上,提出了一个考虑通信延迟影响的改进刹车灯模型,其更新规则如下。
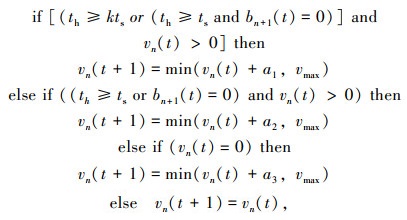
(1) 加速规则:
|
(1) |
式中,k为常数;vn (t)为车辆n在上一时步的速度;vn (t+1)为车辆n在当前时步的速度;th=dn/vn (t)表示当前车辆与前车的时间间距, 其中dn=xn+1 (t)-xn (t)-lveh为车辆n与前车n+1在上一时步的间距;ts=min(vn(t), h)为当前车辆与前车的安全时间间距;h为刹车灯的影响范围;bn+1 (t)为车辆n+1在上一时步的刹车灯状态,bn+1 (t)=1和bn+1 (t)=0分别为刹车灯的亮和灭。
(2) 确定性减速规则:

|
(2) |
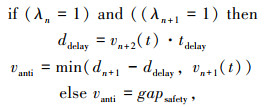
式中,dneff=dn+max(vanti-gapsafety, 0)为当前车辆与前车的有效间距;gapsafety为控制参数,保证车辆间安全距离,避免发生碰撞;vanti为前车当前时步的期望速度,与前车上一时步的速度和前车与前前车的间距有关,vanti的计算如式(3)所示。
|
(3) |
式中,λn=1为当前车辆是联网车辆;(λn+1=1为前车是联网车辆;vn+2 (t)为前前车在上一时步的速度;tdelay为车联网通信延迟时间,由传播延迟、传输延迟和处理延迟组成;ddelay为由于车联网通信延迟引起的滞后间距。
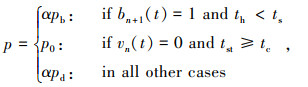
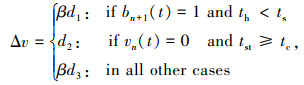
(3) 确定随机慢化概率p和相应的减速系数Δv:
|
(4) |
|
(5) |
|
(6) |
|
(7) |
|
(8) |
式中,ω为联网车辆与普通车辆在随机慢化概率和减速系数之间的差异系数;α和β为Xiang模型中防止车辆出现过度减速现象的系数,其中α1 < α2,β1 < β2。
(4) 随机慢化规则:
|
(9) |
(5) 确定刹车灯状态:

|
(10) |
(6) 确定停车时间:

|
(11) |
(7) 位置更新规则:

|
(12) |
模拟仿真采用周期性边界条件,道路长度设置为10 000个元胞,在传统NS模型[9]中,每辆车占据1个元胞,考虑到现实生活中车辆间会保留一定安全距离,因此元胞长度设为7.5 m。在刹车灯模型中元胞的划分更加细化,每个元胞长度为1.5 m,每辆车占据5个元胞。相应参数设置与Xiang模型[21]相同,具体仿真参数设置如表 1所示。为了避免试验的偶然性,对于每个密度重复模拟60次,密度的间隔为0.01,每次模拟共60 000时步,此时交通流已经演化为稳定状态,采样范围为50 000~60 000时步。
| 参数名称 | 参数值 | 参数名称 | 参数值 | |
| vmax | 20 cell·s―1 | P0 | 0.5 | |
| h | 6 cell | pd | 0.1 | |
| gapsafety | 7 cell | d1 | 2 | |
| α1 | 0.5 | d2 | 1 | |
| α2 | 1 | d3 | 1 | |
| β1 | 0.5 | a1 | 3 | |
| β2 | 1 | a2 | 2 | |
| tdelay | 0~1 s | a3 | 1 | |
| pb | 0.94 | ω | 0.25 |
2.2 联网渗透率对交通流的影响
如图 2所示为联网车辆渗透率λ= {0, 0.5, 1}时速度和流量与车辆密度的关系。当车辆密度很小时,车辆速度接近最大速度vmax。随着车辆密度的增加,车辆速度开始缓慢下降,但是交通流量保持上升,到达道路交通容量后流量开始下降。通过对比不同联网渗透率下车辆速度和交通流量的变化可以看出,联网渗透率的增加能有效提高车辆的平均速度和道路交通容量,同时车辆速度保持最大值到出现速降的车辆密度值变大,交通流量最大值显著提高。当λ=0时,车辆速度在车辆密度为0.04时开始下降,当车辆密度到达0.15时,交通流量达到最大值2.5后开始下降。当λ=0.5,车辆速度在车辆密度为0.07时开始下降,当车辆密度达到0.2时,交通流量到达最大值3.16然后随车辆密度开始下降。当联网渗透率λ=1时,即道路上全为联网车辆,车辆在自由流状态下速度保持最大车速直到车辆密度为0.23时开始下降,此时交通流量达到最大值4.58,然后随密度增加开始下降。

|
| 图 2 车辆联网渗透率变化时交通流基本图 Fig. 2 Traffic flow fundamental diagrams when connected vehicle penetration rate changes |
| |
2.3 车联网通信延迟对交通流的影响
如图 3(a)所示给出全联网车辆状态下车联网通信延迟tdelay= {0.1 s, 0.3 s, 0.5 s, 0.8 s}时交通流基本图。随着车联网通信延迟的增大,车辆平均速度从最大值出现速降的车辆密度阈值减小,交通流量最大值也随之降低,道路通行能力变差。图 3(b)给出车辆密度从0.18~0.25时通信延迟影响下交通流变化的局部图,可以看出,当tdelay=0.1 s,车辆密度达到0.23,车辆速度才开始下降,此时交通流量达到最大值4.55。当tdelay=0.3 s,车辆密度为0.22时,车辆速度开始下降,交通流量到达最大值4.38。当tdelay=0.5 s,在车辆密度为0.21时达到了交通流量最大值4.17然后下降。当tdelay=0.8 s时,此时车辆密度仅在0.19时车辆速度就开始下降,流量达到最大值3.85。

|
| 图 3 通信延迟变化时交通流基本图 Fig. 3 Traffic flow fundamental diagrams when communication delay changes |
| |
2.4 车联网通信延迟对交通流演化的影响
为了研究不同车联网通信延迟下交通流演化的复杂性,记录每个车辆密度下的流量序列,使用标准差系数来反映流量样本的稳定性。标准差系数是样本的标准差和样本平均值的比值。标准差系数越小,流量样本的波动程度越小,流量就越稳定。反之流量样本波动越大,流量越不稳定。图 4(a),4(b),4(c)分别为tdelay=0.3 s,tdelay=0.5 s,tdelay=0.8 s时流量样本标准差系数的变化。

|
| 图 4 不同通信延迟下流量样本的标准差系数 Fig. 4 Standard deviation coefficients of traffic samples with different communication delays |
| |
在车辆密度较小或者较大时,流量样本的标准差系数都很小,此时流量样本很稳定。在中间车流密度时,由于交通流演化的复杂性,流量样本的标准差系数产生较大的震荡。从图中可以看出,3组通信延迟条件下流量样本开始出现波动的车流密度不同,其中k1=0.22,k2=0.21,k3=0.19。从数据分析可以看出当车联网通信延迟越大时,交通流状态更早的从同步流演化为宽运动堵塞,交通流量下降的更早。当密度为0.27时,此时标准差系数最大,流量样本最不稳定。为了进一步说明这一性质,图 5给出车辆密度为0.27,tdelay=0.3时流量样本值的分布。

|
| 图 5 流量样本值分布 Fig. 5 Flow sample values distribution |
| |
从图 5可以看出流量样本值集中在3.18和3.51左右,可以推断两个样本的交通流演化出现两种稳定状态。图 6分别给出两个样本的时空图,其中图 6(a)和图 6(b)分别流量样本值为3.51和3.18时的时空图。样本值为3.51时,交通流演化为多个窄运动堵塞。而样本值为3.18时,交通流演化为一个宽运动堵塞,这与我们的推断结果一致,体现了通信延迟影响下交通流演化的复杂性。

|
| 图 6 交通流演化时空图 Fig. 6 Spatio-temporal map of traffic flow evolution |
| |
3 结论
根据联网汽车和普通车辆交通流演化规则不同,分析不同联网车辆渗透率对交通流的影响,联网车辆渗透率的增加能有效提高车辆速度和道路通行能力。车联网通信延迟会导致车辆平均速度降低,交通流量下降,其中,最大交通流量在通信延迟为0.8 s时比通信延迟为0.1,0.3 s和0.5 s时分别下降18.18%,13.76%和8.31%。引起交通流状态从同步流向宽运动堵塞相变的阈值密度减小,交通流稳定性下降。本研究仅考虑了通信延迟影响下的单车道车联网交通流建模,未来的研究工作将考虑更为复杂的交通场景。并将改进的交通流模型放入真实车联网仿真场景中,结合实测通信延迟进一步分析对于车联网交通流的影响。
| [1] |
刘斌, 赵天舒, 张冉霞. 基于改进PCA-Logistic模型对个人汽车保有量预测[J]. 公路交通科技, 2020, 37(8): 136-143. LIU Bin, ZHAO Tianshu, ZHANG Ranxia. Prediction of private car ownership based on improved PCA-Logistic model[J]. Journal of Highway and Transportation Research and Development, 2020, 37(8): 136-143. |
| [2] |
邵长桥, 郑加菊. 基于运行效率的交通拥堵度量和评价方法[J]. 北京工业大学学报, 2022, 48(4): 401-407. SHAO Changqiao, ZHENG Jiaju. Congestion measurement and evaluation based on traffic operational efficiency[J]. Journal of Beijing University of Technology, 2022, 48(4): 401-407. |
| [3] |
RAZA A, ALI M U, ULLAH U, et al. Evaluation of a sustainable urban transportation system in terms of traffic congestion: A case study in Taxila, Pakistan[J].
Sustainability, 2022, 14(19): 12325.
DOI:10.3390/su141912325 |
| [4] |
ALSAAWY Y, ALKHODRE A, SEN A A, et al. A comprehensive and effective framework for traffic congestion problem based on the integration of IoT and data analytics[J].
Applied Sciences, 2022, 12(4): 2043.
DOI:10.3390/app12042043 |
| [5] |
CAO Z P, LU L L, CHEN C, et al. Modeling and simulating urban traffic flow mixed with regular and connected vehicles[J].
IEEE Access, 2021, 9: 10392-10399.
DOI:10.1109/ACCESS.2021.3050199 |
| [6] |
NAIR G S, BHAT C R. Sharing the road with autonomous vehicles: perceived safety and regulatory preferences[J].
Transportation Research Part C: Emerging Technologies, 2021, 122: 102885.
DOI:10.1016/j.trc.2020.102885 |
| [7] |
李力, 王飞跃. 地面交通控制的百年回顾和未来展望[J]. 自动化学报, 2018, 44(4): 577-583. LI Li, WANG Feiyue. Ground traffic control in the past century and its future perspective[J]. Acta Automatica Sinica, 2018, 44(4): 577-583. |
| [8] |
HU X J, QIAO L Q, HAO X T, et al. Research on the impact of entry points on urban arterial roads in the framework of Kerner's three-phase traffic theory[J].
Physica A: Statistical Mechanics and Its Applications, 2022, 605: 127962.
DOI:10.1016/j.physa.2022.127962 |
| [9] |
NAGEL K, SCHRECKENBERG M. A cellular automaton model for freeway traffic[J].
Journal de Physique I, 1992, 2(12): 2221-2229.
DOI:10.1051/jp2:1992262 |
| [10] |
ZHAO W M, NGODUY D, SHEPHERD S, et al. A platoon based cooperative eco-driving model for mixed automated and human-driven vehicles at a signalised intersection[J].
Transportation Research Part C: Emerging Technologies, 2018, 95: 802-821.
DOI:10.1016/j.trc.2018.05.025 |
| [11] |
徐桃让, 姚志洪, 蒋阳升, 等. 智能网联车环境下考虑反应时间影响的基本图模型[J]. 公路交通科技, 2020, 37(8): 108-117. XU Taorang, YAO Zhihong, JIANG Yangsheng, et al. Fundamental diagram model of considering reaction time in environment of intelligent connected vehicles[J]. Journal of Highway and Transportation Research and Development, 2020, 37(8): 108-117. |
| [12] |
ZHAO H T, LIU X R, CHEN X X, et al. Cellular automata model for traffic flow at intersections in Internet of vehicles[J].
Physica A: Statistical Mechanics and its Applications, 2018, 494: 40-51.
DOI:10.1016/j.physa.2017.11.152 |
| [13] |
ZHAO H T, LIN L, XU C P, et al. Cellular automata model under Kerner's framework of three-phase traffic theory considering the effect of forward-backward vehicles in Internet of vehicles[J].
Physica A: Statistical Mechanics and its Applications, 2020, 553: 124213.
DOI:10.1016/j.physa.2020.124213 |
| [14] |
蒋阳升, 王思琛, 高宽, 等. 混入智能网联车队的混合交通流元胞自动机模型[J]. 系统仿真学报, 2022, 34(5): 1025-1032. JIANG Yangsheng, WANG Sichen, GAO Kuan, et al. Cellular automata model of mixed traffic flow composed of intelligent connected vehicles'platoon[J]. Journal of System Simulation, 2022, 34(5): 1025-1032. |
| [15] |
ZHAO H T, ZHAO X, LU J C, et al. Cellular automata model for urban road traffic flow considering Internet of vehicles and emergency vehicles[J].
Journal of Computational Science, 2020, 47: 101221.
DOI:10.1016/j.jocs.2020.101221 |
| [16] |
WANG T, CHENG R J, WU Y. Stability analysis of heterogeneous traffic flow influenced by memory feedback control signal[J].
Applied Mathematical Modelling, 2022, 109: 693-708.
DOI:10.1016/j.apm.2022.05.026 |
| [17] |
张建旭, 胡帅, 金宏意. 人机混驾交通流事故预警换道决策及特性分析[J]. 公路交通科技, 2023, 40(11): 212-221, 236. ZHANG Jianxu, HU Shuai, JIN Hongyi. Lane-change decision and characteristic analysis on accident warning of mixed traffic flow with human-dirving and autonomous vehicle[J]. Journal of Highway and Transportation Research and Development, 2023, 40(11): 212-221, 236. |
| [18] |
王正武, 陈涛, 向健, 等. 网联混合流高速公路车道管理及通行能力分析[J]. 公路交通科技, 2024, 41(2): 191-202. WANG Zhengwu, CHEN Tao, XIANG Jian, et al. Expressway lane management and traffic capacity analysis under mixed flow and connected environment[J]. Journal of Highway and Transportation Research and Development, 2024, 41(2): 191-202. |
| [19] |
NILSSON M G, GUSTAFSON C, ABBAS T, et al. A measurement-based multilink shadowing model for V2V network simulations of highway scenarios[J].
IEEE Transactions on Vehicular Technology, 2017, 66(10): 8632-8643.
DOI:10.1109/TVT.2017.2709258 |
| [20] |
FANG Y K, MIN H G, WU X, et al. On-ramp merging strategies of connected and automated vehicles considering communication delay[J].
IEEE Transactions on Intelligent Transportation Systems, 2022, 23(9): 15298-15312.
DOI:10.1109/TITS.2022.3140219 |
| [21] |
XIANG Z T, LI Y J, CHEN Y F, et al. Simulating synchronized traffic flow and wide moving jam based on the brake light rule[J].
Physica A: Statistical Mechanics and its Applications, 2013, 392(21): 5399-5413.
|