 2025, Vol. 42
2025, Vol. 42扩展功能
文章信息
- 张韫, 张波, 王剑楠, 申田, 刘明.
- ZHANG Yun, ZHANG Bo, WANG Jiannan, SHEN Tian, LIU Ming
- 基于动态时空特征周期性编码的公路交通流量预测模型
- Highway traffic flow prediction model based on periodic encoding with dynamic spatio-temporal features
- 公路交通科技, 2025, 42(3): 21-33
- Journal of Highway and Transportation Research and Denelopment, 2025, 42(3): 21-33
- 10.3969/j.issn.1002-0268.2025.03.003
-
文章历史
- 收稿日期: 2024-09-10




 ,
, 2. 陕西交通控股集团有限公司运营管理分公司, 陕西 西安 710000;
3. 陕西交控供应链管理集团有限公司, 陕西 西安 710000;
4. 西安理工大学 材料科学与工程学院, 陕西 西安 710048
2. Operation Management Branch of Shaanxi Transportation Holding Group Co., Ltd., Xi'an, Shaanxi 710000, China;
3. Shaanxi Transportation Holding Supply Chain Management Group Co., Ltd., Xi'an, Shaanxi 710000, China;
4. School of Materials Science and Engineering, Xi'an University of Technology, Xi'an, Shaanxi 710048, China
作为智能交通系统的重要组成部分,交通流预测在现代交通管理与规划中扮演着至关重要的角色。准确及时的交通流预测对于缓解交通拥堵、提升道路资源利用率、增强交通管理效能、强化交通安全、优化公共交通服务体系及加速推动智慧城市的建设与发展等方面,均展现出深远的战略意义与实际应用价值[1-2]。
交通流预测是一项复杂的时空数据挖掘任务,依赖于分布式传感网络实时采集的时域车流量数据,旨在对未来特定时间段(涵盖高峰期和非高峰期)内的交通流量进行估计。这一预测过程涉及对具有显著空间拓扑特征的路网历史数据和时间序列特征的交通流数据的深度分析,构成了一个典型的时空数据挖掘问题。作为时空网络数据预测问题,交通流预测需要准确建模交通数据中复杂的时空关系。在空间维度上,交通流预测需考虑路段间车流量的空间自相关性,这种相关性源于路网的物理连通性及其拓扑结构,尤其体现在邻接路段之间;在时间维度上,各路段的历史交通流数据不仅对其自身未来状态有预测价值,而且通过空间传播效应影响到拓扑相关路段的未来交通流态势。此外,气象条件变化和交通事故等随机事件会引入系统扰动,不仅改变交通流的演化轨迹,而且增加了预测模型的复杂性和不确定性。因此,交通流预测需要综合考虑时空依赖性、非线性动态特征、多变量耦合关系及随机扰动等因素,对预测算法的鲁棒性和泛化能力提出了较高要求。
主流的交通流预测方法主要分为基于统计学的方法、基于机器学习的方法、基于深度学习的方法这3类[2]。典型的统计学的交通流预测模型有差分自回归移动平均模型(ARIMA)[3]、自回归滑动平均模型(ARMA)[4]、卡尔曼滤波法[5]等。该类模型主要利用历史数据的统计特性对未来的交通流量进行预测,适用于相对稳定的交通模式,计算效率高,但存在难以捕捉复杂非线性关系、不能有效处理路网交通流空间依赖关系的问题。而基于机器学习的交通流预测模型,如支持向量回归[6]、K近邻[7]、人工神经网络[8]等方法,主要依赖于平稳性假设进行预测。这些假设只捕捉时间序列特征,忽略了交通流数据复杂的时空依赖关系,限制了其对复杂非线性交通流数据预测的有效性。基于机器学习的交通流预测模型由于能够有效处理交通流数据与参数之间的非线性关系,通常比传统统计方法具有更高的预测精度。基于深度学习的交通流预测模型因其强大的特征学习能力和非线性建模能力,成为当前主流的交通流预测模型,如长短期记忆网络(LSTM)[9]、门控循环单元(GRU)[10]、卷积神经网络(CNN)[11]和图神经网络(GCN)[12]等。
受日常通勤等人类活动周期性的影响和城市路网物理结构的影响,交通流呈现出显著的时域性和图拓扑结构特性。基于GCN的交通预测方法通常利用频谱GCN来捕捉交通数据的空间相关性,并依靠RNN、LSTM、GRU和注意力机制建模时间相关性。由于基于图神经网络(GCN)的交通流预测模型能有效捕捉路网的空间拓扑结构和复杂的时空依赖关系,在交通流预测方面展现出强大的性能。特别是基于时空图神经网络(ST-GNN)模型[13],其结合图拓扑结构和时间序列建模的能力,将道路的路网结构作为图,将路段、交叉口或传感器位置作为图的节点,将道路连接或空间相关性作为图的边。例如,STPGCN模型[14]将GCN与时空位置信息相结合,以提取交通信号的空间和时间依赖性;STIDGCN模型[15]设计了一种由空间和时间模块组成的交互式学习GCN框架,该模型提取从全局到局部不同层次的时空特征;ASTGCN[16]模型专门设计了时间注意力和空间注意力模块来捕捉交通数据的时空依赖性。
虽然,上述基于ST-GCN的交通流预测模型在提升交通流预测精度方面表现出较好的性能,但是,该类方法仍存在一定的局限性[17]。首先,现有的基于GCN的交通流预测模型多基于预定义的静态图拓扑结构捕获路网数据的时空相关性,由于路段的异质性,不同类型的道路(如主干道、支路)具有不同特征,且相互之间随时间推移呈现高度的动态相关性,加之节点之间的连接强度或类型可能不同,这种以静态方式提取路网数据空间相关性的方法限制了模型学习动态空间相关性的能力,无法有效处理交通事故等随机事件对模型的扰动;其次,对于交通流的周期性数据特征,现有的基于GCN的交通流预测模型仅利用一维卷积神经网络(1D-CNN)提取交通流数据的时域特征,由于其卷积核大小固定,难以捕捉长距离节点时域依赖关系,忽视了节点之间的相似性在不同周期下的动态关系,存在特征提取不充分的问题[18]。
针对上述问题,本研究提出一种基于动态时空特征周期性编码的公路交通流量预测方法,如图 1所示。该方法首先根据交通流数据的周期性特性,设计周期性交通流数据嵌入模块,捕捉隐藏在交通数据中的多尺度时间依赖特性。然后,针对路网的异质性特性,构建基于动态拓扑编码的空域特征提取模块,利用近邻空域拓扑编码和相似空域拓扑编码,增强模型提取路网数据动态空间相关性的能力。其次,为了进一步捕获不同时间尺度下路网节点交通流的时间依赖关系,构建基于注意力机制约束的时域特征编码模块;通过时域卷积网络模块、时域相关性模块和关键帧相关性模块,对节点之间短期、长期和关键帧之间的相关性进行提取,克服传统GCN难以捕捉长距离节点时域依赖关系的问题。最后,通过在真实数据集上对所提出模型进行预测精度对比分析和消融试验验证,进一步证明所提出模型的有效性。本研究方法的主要创新点如下:

|
| 图 1 交通流预测模型框架 Fig. 1 Architecture of traffic flow prediction model |
| |
(1) 设计周期性交通流数据嵌入模块,利用基于时间分解的交通流数据划分急时空数据嵌入编码,捕捉隐藏在交通流数据中的多尺度时空依赖关系。
(2) 提出基于动态拓扑编码的空域特征提取模块,通过近邻空域拓扑编码及相似空域拓扑编码构建动态拓扑编码的空域图卷积,克服传统GCN模型使用预定义的邻接矩阵聚合节点空域特征,忽略路网异质性的问题。
(3) 提出基于注意力机制约束的时域特征编码模块,通过时域卷积网络模块,时域相关性模块和关键帧相关性模块,提取不同时间尺度下的时间依赖关系,克服传统GCN仅使用一维卷积提取时域特征造成长距离节点时域关系提取受限的问题。
1 问题定义与描述(1) 交通路网
本研究根据交通路网数据的拓扑特性,将其表示为图结构G=(υ, E, A),其中,υ为由路网数据采集器构成的节点集,|υ|=N为节点的数量,E为连接路网节点的边集合,A=(αij)N×N∈RN×N为编码路网节点之间连接关系的邻接矩阵,αij为组成邻接矩阵A的元素,R为特征向量空间。对于任意的节点υi, υj∈υ,如果(υi, υj)∈E,则αij=1,否则,αij=0。
(2) 交通信号
交通信号Xt, n, c∈RT×N×C表示在任意t时刻节点n所采集的交通数据,其中,1≤t≤T,1≤n≤N,1≤c≤C。T为交通时间序列,N为交通路网采集器的数量,C为采集器所采集的交通数据类型,包括车流量、车流速度、车流密度等信息。本研究仅涉及交通流量预测,因此,C=1。Xt, n∈R1为t时刻节点n的交通流数据,Xt=[Xt, 1, …, Xt, n, …, Xt, N]∈RN×1为t时刻整个交通路网的交通流数据。
(3) 交通流预测
对于给定的交通路网G和其历史Th时间步长内的交通流数据X(t-Th+1)∶t=[Xt-Th+1, …, Xt-1, Xt]∈RTh×N×1,交通流预测的目标是构建一个交通流预测模型P(·) 来对未来TP时间步长内的交通流状态进行预测Y(t+1)∶(t+TP)=[Yt+1, Yt+2, …, Yt+TP]∈RTP×N×1,表示为:

|
(1) |
本研究所提出的动态时空特征周期性编码的交通流量预测模型主要由4部分组成(见图 1)。交通流数据首先经过周期性交通流数据嵌入模块,通过基于时间分解的交通流数据划分,将原始数据处理为近期序列Xr,日周期序列Xd,周周期序列Xw的三通道时空数据,同时,通过时空数据嵌入编码对交通路网节点进行编码,捕捉并赋予其随时间步长演变的动态时空位置特征;然后,将三通道时空数据分别经过动态拓扑编码的空域特征编码模块,捕获交通路网节点的空域特征以及节点在不同时间周期下的动态相关性;其次,通过基于注意力机制约束的时域特征编码模块,进一步捕获节点之间短期、长期和关键帧之间的相关性;最后,利用自适应融合模块,对不同时间周期下的时空特征进行融合,同时,计算交通流量预测值与真实值之间的平均绝对误差作为模型的损失函数对网络进行训练,在此,为了缓解模型训练过程中的梯度消失问题,将残差连接添加到空域特征提取模块的输入和时域特征编码模块的输出。
2.1 周期性交通流数据嵌入模块 2.1.1 基于时间分解的交通流数据划分受日常通勤等人类活动周期性的影响,交通流数据呈现出显著的周期动态相关性,此特性在日周期和周周期尺度上均有显著表现。因此,在构建交通流预测模型时,显式地将数据的周期性特征嵌入到交通流预测模型中对于提升模型预测性能至关重要。为了充分捕捉隐藏在交通流数据中的多尺度时间动态相关性,本研究基于时间分解,将交通流数据划分为近期序列、日周期序列和周周期序列[19]。
(1) 近期序列
近期序列Xr定义为预测目标前Tr个连续时间步长的交通流数据,表示为:

|
(2) |
(2) 日周期序列
日周期性数据Xd定义为预测目标前1 d同一时间段的交通流数据,表示为:

|
(3) |
式中,τ为1 d时间(24 h)内采集器采集的总次数;Td为日周期序列的时间步长。
(3) 周周期序列
周周期性数据Xw定义为预测目标前1周同一时间段的交通流数据,表示为:

|
(4) |
式中Tw为周周期序列的时间步长。
2.1.2 时空数据嵌入编码为了准确编码路网各节点在不同时间步下的动态特征,本研究对周期性交通流数据进行时空嵌入位置编码。首先,将原始数据Xr, Xd, Xw通过线性变换层映射到高维空间,得到相应的特征向量 



|
(5) |
式中,
由于道路网络中的交通流状态呈现出复杂的空间-时间相关性,一条路段的交通状态受到其他路段的异质性影响,且这种影响随时间呈现高度动态相关性。对于交通网络而言,节点之间的相关性随着时间的推移而动态变化,简单地将GCN应用于交通网络捕获邻域节点的相似特征,忽略了不同时间周期下节点之间的相似性,无法对节点之间的动态相关性进行有效捕捉[21]。因此,本研究提出基于动态拓扑编码的空域特征提取模块(SFM-DTE),如图 2所示。该模块主要分为3部分:(1)近邻空域拓扑编码模块:用于捕捉拓扑结构上邻近节点的空间相关性;(2)相似空域拓扑编码模块:用于捕捉非邻近但具有相似功能属性区域节点的空间相关性;(3) 基于动态拓扑编码的空域图卷积:通过自适应动态捕获节点之间的动态相关性,获得道路路网的空域特征表示。

|
| 图 2 基于动态拓扑编码的空域特征提取模块 Fig. 2 Spatial feature extraction module based on dynamic topological encoding |
| |
2.2.1 近邻空域拓扑编码
为了提取近邻节点空间的相关性,本研究首先构造近邻图拓扑结构Ga=(υ, E, Aa)对路网中一定范围内的道路交通状态之间的相互影响进行编码。
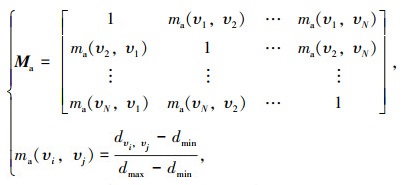
|
(6) |
式中,Ma为邻接节点的关联矩阵,用以编码邻接空间中节点的相互关联关系;dυi,υj为节点υi和节点υj之间的距离;dmax和dmin为近邻图拓扑结构中节点之间的最大距离和最小距离。
由于不同节点之间的相互作用不同,图拓扑结构无法获得隐藏在真实路网空间节点之间的依赖关系,这些关系可能表现为两节点间虽无直接(显式)链路相连,却通过间接路径或共同邻居节点等机制相互影响,即存在非直接连接的相互依赖性。因此,本研究基于注意力机制[22],计算邻接空间中节点间的关联关系,捕获节点间隐藏的空间依赖关系。首先根据式(7)计算查询向量Q和键向量K,然后,根据式(8)计算节点间的关联关系。此外,为了捕获不同尺度路网节点间的空间依赖关系,使用多头注意力对Siatt进行联结,如式(9)所示。最后,根据式(10)获得注意力约束的邻接空间关联关系矩阵。

|
(7) |
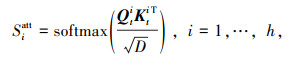
|
(8) |

|
(9) |

|
(10) |
式中,h=4为多头注意力的数量;WQ, WK, WA∈RD×D为可训练的参数矩阵;concat(·)为级联操作;⊗为Hadamard乘积。
2.2.2 相似空域拓扑编码由于不同路段可能呈现相似的交通流动态特性,许多在空间位置上距离很远的节点呈现出相似的功能属性。因此,为了更精确地量化不同路段之间的交通状态相似度,本研究考虑交通流的传播性,基于历史路网信息,构建相似空间图拓扑结构Gsim=(υ, E, Asim),用于捕捉远距离节点对当前节点的影响。首先,利用皮尔逊相关系数计算空域任意节点之间的相似性,如式(11)所示。
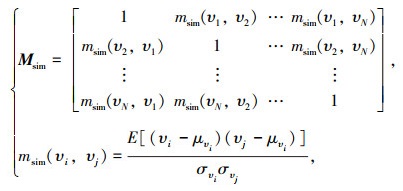
|
(11) |
式中,msim(·)为皮尔逊相关系数,其值越大,反映2个节点之间的历史交通模式越相似;Msim为基于皮尔逊相关系数的邻接空间矩阵。
2.2.3 基于动态拓扑编码的空域图卷积为了克服具有固定邻接矩阵的GCN仅捕获局部邻域空间特征的局限性,本研究基于近邻空域拓扑编码和相似空域拓扑编码,构建基于动态拓扑编码的空域图卷积对该路段和其相邻路段的交通流信息进行聚合操作。通过注意力机制约束,根据路网情况,自适应动态调整节点之间的动态相关性,获得道路路网的空域特征表示。本研究分别将经过时空数据嵌入编码的三通道交通流数据作为SFM-DTE模块的输入,基于动态拓扑编码的空域图卷积层表示为:
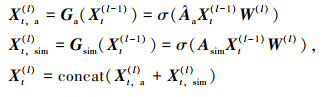
|
(12) |
式中,Xt(l)和Xt(l-1)分别为图卷积网络第l层和l-1层的节点特征;Xt(0)=[XjE], j=r, d, w,例如,j=r, Xt(0)=[Xt, 1E, …, Xt, nE, …, Xt, NE];W(l)为投影矩阵;σ(·)为非线性激活函数;


交通流数据作为衡量特定时段交通状态的重要指标,其在时间维度方面,不同时间尺度下的路网节点交通流变化呈现出显著的周期性和相似性变化规律。此外,当前时刻的交通状态依赖于历史时刻的交通状态,具有一定的时域相关性,这些特征为交通流预测提供了重要的依据。然而,现有的大多数基于GCN的交通流预测模型仅利用一维卷积神经网络提取交通流数据的时域特征,由于其卷积核大小固定,造成时间维度感受野受限,进而限制了模型捕捉长期时域依赖特征的能力。为此,本研究提出基于注意力机制约束的时域特征编码模块(TFM-AC),如图 3所示,该模块由3部分组成:时域卷积网络(TCN)模块、时域相关性特征提取模块(TCM)、关键帧时域相关性特征提取模块(KTM)。该模块通过对3个尺度的时域特征进行拼接,提取不同尺度下交通流序列中的长短期时域特征,同时,基于注意力机制约束,过滤周期性数据中的冗余信息。

|
| 图 3 注意力机制约束的时域特征编码模块 Fig. 3 Temporal feature encoding module based on attention constraints |
| |
2.3.1 时域卷积网络模块
时域输入特征X(t-Th+1)t-1l,如式(13)所示。本研究根据传统的时域卷积网络模块(TCN)操作,利用核函数为Kt的卷积convKt提取时间序列的短期特征。

|
(13) |
由于交通流数据在时间维度上,不同时间步间的依赖关系不同,为了捕获不同节点随时间变化的全局动态相关特性,本研究首先利用自注意力机制计算输入数据的时间相关性矩阵,然后基于此进行输入数据重要性选择,提取交通流数据的全局上下文时域关系。对于时域输入特征X(t-Th+1)t-1l而言,其基于时间相关性的全局特征提取定义为:
|
(14) |
式中,WQ, WK, WV∈RD×D为可训练的参数矩阵;Ylong为基于时间相关性提取的全局时域特征。
2.3.3 关键帧相关性模块(KTM)为了有效捕获连续帧中未连接节点之间的时域依赖关系,本研究设计基于关键帧的上下文时域特征提取模块,其首先将时域输入数据X(t-Th+1)t-1l划分为若干个非重叠的时间窗区域X(t-Th+1)t-1l=[Xcat1, Xcat2, …,Xcati],其中,Xcat1=[X1, X2, …, Xi, …, Xn]∈RTcatj×Ncat×1j由n个连续时间内的N个节点组成,Xi∈Rn×N×1,然后按照式(16)对拼接特征Xcati进行时域自注意力计算,提取连续帧中不同节点之间的时间依赖关系。

|
(15) |

|
(16) |
式中,n=3为时间窗区域包含的帧数;
最后,按照式(17)对时域卷积网络模块、时域相关性模块和关键帧时序相关性模型提取的时域特征进行融合,利用所设计三分支模块,对节点之间短期、长期和关键帧之间的相关性进行提取,捕获时域数据的时域特征YT。

|
(17) |
如图 1所示,本研究为了考虑不同周期序列对预测结果的影响,利用2.2节和2.3节提出的空域特征编码模块和时域特征编码模块设计了3个结构相同的平行子网络分别对近期、日周期和周周期交通流序列的时空相关性进行特征提取,最后,利用加权求和的方式融合3个组件的输出,得到最终的预测结果。首先,对3个平行子网络的输出特征YTj, j∈r, d, w进行卷积操作,利用卷积操作将YTr∈RTr×N×1, YTd∈RTd×N×1, YTw∈RTw×N×1的维度转换为与预测目标Y∈RT0×N×1一致的维度,然后通过可学习权重矩阵Wr∈RT0×N×1, Wd∈RT0×N×1, Ww∈RT0×N×1对平行网络的数据进行融合,得到预测结果

|
(18) |

|
(19) |
为了评估本研究所提出模型的性能,采用3个真实的公路交通数据集PEMS04,PEMS07,PEMS08进行性能分析,如表 1所示。该数据集来源于美国加州运输绩效测量系统(PeMS)收集的加利福尼亚州的3个地区。试验选择3个数据集中的交通流量特征进行预测任务,路网中的探测器以30 s一次的频率收集路面信息,采用每隔5 min汇总一次,每个检测器1 h包含12个交通流样本数据,每天共计288个时间点数据。PEMS04包含2018年1月1日至2月8日旧金山地区307个检测器采集的交通流数据样本,PEMS07包含2017年5月1日至8月31日旧金山地区883个检测器采集的交通流数据样本,PEMS08包含2016年7月1日至8月31日圣贝纳迪诺地区170个检测器采集的交通流数据样本。交通流数据每5 min汇总一次,并以Z-Score方法对交通流数据统一进行标准化并作为模型的输入,其中,将道路拓扑信息表示为GCN网络的邻接矩阵。
| 数据集 | PEMS04 | PEMS07 | PEMS08 |
| 节点个数/个 | 307 | 883 | 170 |
| 时间点/个 | 16 992 | 28 224 | 17 856 |
| 采样间隔/min | 5 | 5 | 5 |
| 开始时间 | 2018年1月 | 2017年5月 | 2016年7月 |
| 结束时间 | 2018年2月 | 2017年8月 | 2016年8月 |
| 数据类型 | 交通流 | 交通流 | 交通流 |
| 采样地点 | 美国旧金山市 | 美国旧金山市 | 美国圣贝纳迪诺县 |
本研究按照文献[1, 11, 17-18, 20],选用平均绝对误差(MAE)、均方根误差(RMSE)与平均绝对百分比误差(MAPE)作为试验验证指标衡量预测结果与真值之间的差异。具体定义为:
|
(20) |
式中,
本研究按照文献[1, 11, 24-26]的数据集划分方法,将PEMS04,PEMS07,PEMS08这3个数据集按照6∶2∶2的比例划分为训练集、验证集和测试集。使用前1 h,即Th=12的交通流数据对未来1 h(即Tp=12)的交通流数据进行预测。所有试验均在PyTorch框架下Python 3.6.2环境下进行,使用了2个带有CUDA 11.1的Nvidia GTX 2080Ti GPU。该模型使用Adam优化器进行训练,利用平均绝对误差作为损失函数进行模型训练,epochs设置为100,初始学习率设置为0.03。空域特征编码模块和时域特征编码模块的层数L=3, D=16;TCN模块中Kt=3;KTM模块中n=3。
3.3 主流对比模型(1) GRU-ED[10],即基于编解码的门控递归神经网络模型。该模型通过利用多个GRU单元的卷积层构建编解码模型实现交通流的预测。
(2) LSTM[9],即长短期记忆网络。该模型利用多层LSTM将输入序列映射到固定维度,实现时域特征的提取和交通流的预测。
(3) ST-GCN[13],即时空图卷积神经网络。该模型构建空域图卷积和时域门控卷积层提取交通流数据的空间和时间依赖关系。
(4) DCRNN[11],即扩散卷积递归神经网络。该模型通过构建有向图,利用双向随机游走膨胀卷积提取空域特征,通过编解码框架提取时域特征。
(5) DSANet[23],即对偶自注意力神经网络模型。该模型利用对偶的自注意力机制捕捉空间依赖关系,利用核函数大小为3的卷积提取时间相关性。
(6) ASTGCN[16],即基于注意力的时空图卷积网络。该模型通过构建时空注意力机制,捕捉交通流数据中的动态相关性,同时利用时空图卷积提取交通流数据的时空特征。
(7) AGCRN[24],即自适应图卷积递归网络。该模型提出自适应图卷积,利用节点自适应参数学习和数据自适应图生成模块捕获交通流数据的时空相关性。
(8) STG-NCDE[25],即时空图神经控制微分方程模型。该模型将神经控制微分方程引入时域数据处理中,利用NCDEs学习交通流数据的时域和空域特征。
(9) STGODE[26],即时空图常微分方程网络模型。该模型利用常微分方程提取时空特征,同时,设计语义邻接矩阵和时域膨胀卷积捕获交通流数据的长期时间依赖关系。
3.4 与主流算法的对比分析 3.4.1 与主流算法预测精度对比分析本研究所提出算法与9种主流对比算法在公路交通数据集PEMS04,PEMS07,PEMS08上的交通流预测性能对比结果如见表 2所示。本研究算法在12步(即未来1 h)预测的结果优于其对比算法,在PEMS04获得18.33的MAE,30.48的RMSE和12.37%的MAPE;在PEMS07数据集上获得19.68的MAE,33.40的RMSE和8.23%的MAPE;在PEMS08数据集上获得14.31的MAE,23.71的RMSE和9.38%的MAPE。
| 模型 | PEMS04 | PEMS07 | PEMS08 | ||||||||
| MAE | RMSE | MAPE/% | MAE | RMSE | MAPE/% | MAE | RMSE | MAPE/% | |||
| FC-LSTM | 26.81 | 40.74 | 22.33 | 29.71 | 45.32 | 14.14 | 22.19 | 33.59 | 18.74 | ||
| GRU-ED | 23.68 | 39.27 | 16.44 | 27.66 | 43.49 | 12.20 | 22.0 | 36.22 | 13.33 | ||
| DCRNN | 22.74 | 36.58 | 14.75 | 23.64 | 36.52 | 12.28 | 18.18 | 28.18 | 11.23 | ||
| ST-GCN | 21.16 | 34.89 | 13.83 | 25.33 | 39.34 | 11.21 | 17.50 | 27.09 | 11.29 | ||
| DSANet | 22.79 | 35.77 | 16.03 | 31.36 | 49.11 | 14.43 | 17.14 | 26.96 | 11.32 | ||
| ASTGCN | 22.42 | 34.25 | 15.87 | 21.22 | 34.10 | 9.05 | 15.07 | 24.80 | 9.51 | ||
| AGCRN | 19.83 | 32.26 | 12.97 | 22.37 | 36.55 | 9.12 | 15.95 | 25.22 | 10.09 | ||
| STG-NCDE | 19.21 | 31.09 | 12.76 | 20.53 | 33.84 | 8.80 | 15.45 | 24.81 | 9.92 | ||
| STGODE | 20.84 | 32.82 | 13.77 | 22.59 | 37.54 | 10.14 | 16.81 | 25.97 | 10.62 | ||
| 本研究算法 | 18.33 | 30.48 | 12.37 | 19.68 | 33.40 | 8.23 | 14.31 | 23.71 | 9.38 | ||
(1) 在基于循环神经网络的交通流预测模型方面,LSTM和GRU-ED的性能明显弱于基于图卷积神经网络模型的预测性能。其中,ST-GCN,ASTGCN,AGCRN等模型的MAE,RMSE和MAPE均低于LSTM,GRU-ED,这是由于基于循环神经网络的模型仅利用深度神经网络模型捕获交通流数据的时域特征,忽略节点之间的空间相关性,这进一步证明空域特征对于提升交通流预测模型的性能至关重要。
(2) 在基于GCN的交通流预测模型方面,虽然DCRNN使用预定义的图拓扑结构提取节点间的空间相关性,但其性能低于基于自适应的GCN的预测模型,其中,DCRNN的MAE和RMSE在PEMS04数据集上值比ASTGCN分别高0.32和2.06,同时,DCRNN的MAE,RMSE和MAPE在PEMS04数据集上值比AGCRN分别提高2.91, 4.32,1.85%,比STG-NDCE分别提高3.53,4.32,1.99%。这表明预定义的图拓扑结构无法捕捉节点之间的长时间相关性,严重影响了交通流预测模型的预测性能。此外,ST-GCN,ASTGCN,AGCRN等模型虽然具有较好的性能,但其通过静态图拓扑结构提取节点的空间依赖关系,忽略交通流数据的动态变化。而本研究提出的模型在时空特征建模过程中,通过设计基于动态拓扑编码的空域特征提取模块和基于注意力机制约束的时域特征编码模块,构建自适应的邻接矩阵,增强模型提取路网数据动态时空相关性的能力,因此,本研究所提出模型的预测精度高于上述算法。
(3) 在基于注意力机制的交通流预测模型方面,虽然DSANet网络采用对偶自注意力机制捕捉节点的空间依赖关系,但其仅用1D-CNN提取时间特征,其预测性能低于ST-GCN,ASTGCN,AGCRN等基于GCN的模型,这一结果进一步说明图拓扑结构模型具有强大的时空特征提取能力。然后,与基于注意力机制的图卷积网络模型相比,如ASTGCN,AGCRN,基于GCN的预测模型的性能显著弱于基于注意力机制的图卷积网络模型。这是由于传统的基于GCN的模型随着时空卷积层的层数增多,使用静态邻接矩阵建模邻域时空依赖关系的GCN会出现过平滑问题,其对于距离相同的节点赋予一样的权值,因此,模型空域相关性建模能力有限。此外,基于TCN的模型使用1D-CNN捕获时间特征,受卷积核大小的限制,模型捕获长期时间相关性的能力受限。而本研究方法在空域特征建模过程中,通过近邻空域拓扑编码和相似空域拓扑编码,捕获节点的动态相关性,同时,利用注意力机制,提取节点间隐藏的空间依赖关系;在时域特征建模过程中,设计三分支的时域卷积网络模块、时域相关性模块和关键帧时域相关性模块,对节点之间短期、长期和关键帧之间的相关性进行提取,克服传统TCN仅利用1D-CNN捕获局部时域特征局限性的问题。
(4) 在基于微分方程控制的GCN交通流预测模型方面(见表 2),STG-NCDE和STGODE模型的预测性能优于ST-GCN,ASTGCN,AGCRN等模型,这是因为STG-NCDE和STGODE模型将常微分方程引入到GCN模型中提取节点的时空特征,由于微分方程能够有效处理时域信号的动态变化,其对于模型性能的提升具有一定的作用。然而,与基于注意力机制的图卷积模型相比,STGODE在PEMS04数据集上的MAE,RMSE,MAPE比AGCRN提高1.01,0.56,0.80%。与本研究所提出方法相比,STG-NCDE和STGODE的预测性能均弱于本研究方法。这进一步说明注意力机制能够有效提取节点的时空上下文信息,从而进一步提升GCN模型的预测性能。
综上所述,本研究模型是基于注意力机制的图卷积网络模型,该模型通过设计周期性交通流数据嵌入模块,显式地将数据的周期性特征嵌入到交通流预测模型中,同时,基于动态拓扑编码的空域特征提取模块,利用注意力机制,自适应动态捕获节点之间的动态相关性,获得道路路网的空域特征表示;此外,利用注意力机制约束的时域特征编码模块,提取不同尺度下交通流序列中的长短期时域特征。因此,所提出模型不仅能够捕捉拓扑结构上邻近节点的时空相关性,而且能提取非邻近但具有相似功能属性区域节点的时空间相关性,增强模型提取路网数据动态时空相关性的能力,提升模型的预测性能。
3.4.2 与主流算法预测步长对比分析为了进一步分析所提出方法的交通流预测性能,本研究在PEMS04数据集上以10 min为步长,分析所提出算法与对比算法在预测未来1 h的交通流预测指标差异,如图 4所示,随着时间步长的增加,本研究算法的预测性能下降较小,LSTM随着时间步长的增加,其预测误差显著增长,这是因为该类模型仅提取交通流数据的时域特征,忽略节点之间的空域特征,其长期预测精度远低于其他时空建模的方法。DCRNN由于利用RNN提取长短期时空数据特性,其预测性能显著高于LSTM,但随着时间步长的增加,其预测性能显著下降。与本研究算法进行对比,DCRNN随着时间步长的增加,由于RNN提取长期时域相关性的能力有限,其性能仍然低于本研究方法。此外,ST-GCN虽然利用GNN提取交通流数据的空域特征,但因其仅利用1D-CNN提取时域相关性,受卷积核大小的限制,其无法有效处理长期信息,其长期预测性能远低于基于注意力机制的预测模型,如ASTGCN和AGCRN等方法,由于注意力机制能够有效提取全局信息,因此该类模型相应的具有较好的预测性能。STG-NCDE和STGODE模型在短期预测方面表现良好,但随着时间步长的增加,与基于注意力机制的图卷积模型相比,其预测性能下降速度较快,这一现象进一步证明注意力机制在时空上下文信息提取方面具有良好的性能。由于本研究方法是基于注意力机制的图卷积网络模型,该模型不仅利用GCN动态提取节点的时空特征,同时利用注意力机制捕获节点的长期相关性,提高了模型的预测性能,因此,相对其他算法,本研究方法具有较高的长期预测性能。

|
| 图 4 本研究所提模型与主流模型的预测性能对比 Fig. 4 Prediction performance of proposed model v.s. other state-of-the-art models |
| |
3.5 消融试验分析
为了进一步分析本研究所设计模型的不同组成模块对预测结果的影响,在PEMS04数据上进行消融试验,通过分析包含不同组件模型的预测性能,分析各模块对预测结果的影响。将包含不同模块的模型分别命名如下。
(1) w/o PEM:为了验证周期性交通流数据嵌入模块对模型预测性能的影响,本研究去掉周期性交通流数据嵌入模块(PEM),对交通流原始数据不进行周期性划分和时空数据嵌入编码,仅利用原始数据进行预测。
(2) w/o SFM-DTE:使用GCN代替基于动态拓扑编码的空域特征提取模块(SFM-DTE)进行空域特征捕捉,使得模型只能依赖固定的邻接矩阵提取交通路网的邻域节点特征。
(3) w/o TFM-AC:使用TCN取代注意力机制约束的时域特征编码模块(TFM-AC),使得模型无法提取动态和长期的节点时间依赖关系。
(4) w/o ASTF:去掉本研究所设计的自适应周期时空特征融合模块(ASTF),仅采用直接相加的方式对3个周期序列输出的结果进行融合。
本研究以PEMS04为例对所提出算法进行消融试验对比(见图 5),分别给出了各模型的平均MAE,RMSE,MAPE值,每个试验重复5次,每次迭代200 epoch。由图可见,w/o PEM的性能相比本研究算法,其MAE,RMSE,MAPE分别升高0.82,1.36,0.33%,这表明周期性交通流数据嵌入模块在能够有效挖掘交通流数据的周期动态相关性,对提升模型预测性能具有重要作用。相比于其他模型,w/o SFM-DTE模型的性能下降最快,仅使用GCN代替基于动态拓扑编码的空域特征提取模块进行空域特征提取,模型不能有效提取节点的空域动态相关性,只能依赖固定的邻接矩阵聚合邻近节点特征,忽视了相似功能属性区域节点的影响,极大地限制了模型的路网空间特征提取能力,因此该模型的预测性能较差。w/o TFM-AC模型由于仅利用TCN提取节点的时域特征,相比本研究模型而言,其不能利用TCM和KTM模块提取节点的全局时间相关性和基于注意力机制捕获的上下文时域相关性,使得模型无法提取动态和长期的节点时间依赖关系,因此,其MAE,RMSE,MAPE相比本研究模型而言,分别增加了4.8,5.05,3.66%,这表明本研究所设计的注意力机制约束的时域特征编码模块在时域特征提取方面的优越性。w/o ASTF相比本模型而言,其MAE,RMSE,MAPE分别增加了1.38,1.21,3.02%,进一步说明本研究所设计的自适应周期时空特征融合模块能够有效地对近期、日周期和周周期交通流序列的时空相关性进行融合,有效地提高了模型的预测精度。

|
| 图 5 在PEMS04数据集上的消融试验结果 Fig. 5 Ablation experiment results on PEMS04 dataset |
| |
3.6 模型计算时间对比分析
为了进一步评估所提出模型的计算时间,本研究在PEMS04数据集上对所提出模型及代表性主流算法的每个epoch训练时间和推理时间进行对比分析,如表 3所示,所有试验在同一个试验环境下执行。由表 2可见,DCRNN,ST-GCN和ASTGCN的训练时间较长,这是因为,DCRNN模型是基于递归神经网络的模型,其递归结构在训练过程中耗时较多,因此,该模型的训练时间较长。ST-GCN和ASTGCN都是基于全卷积结构的图网络,其全卷积操作增加了模型计算的时间。AGCRN利用节点自适应参数学习和构建图网络,其具有较快的计算速度,但其交通流预测性能受限。STGODE和STG-NCDE都基于常微分进行建模,其计算时间相对较长。本研究算法由于在时空特征提取中引入注意力机制进行上下文信息捕捉,因此,其训练时间相对较长,但其推理时间仅为4.9 s。此外,在推理阶段,模型的参数是固定的,不再需要进行梯度更新或优化,故而本研究所提出模型的推理时间仍基本满足大规模路网数据集上的实际应用需求。在未来工作中,本研究将进一步优化所提出模型,通过分布式训练,数据并行处理、模型剪枝等措施开发轻量级交通流预测模型架构,使得模型在保证一定预测精度的同时,具有较低的计算复杂度,更适合于大规模路网和数据集的应用场景。
| 模型 | 训练/(s·epoch-1) | 推理/s |
| DCRNN | 177.1 | 13.4 |
| ST-GCN | 285.9 | 56.4 |
| ASTGCN | 208.7 | 52.0 |
| AGCRN | 6.5 | 1.1 |
| STGODE | 35.2 | 4.1 |
| STG-NCDE | 118.6 | 12.3 |
| 本研究算法 | 45.9 | 4.9 |
4 结论
为了有效提取交通流数据的动态时空相关性和长距离时间依赖关系,本研究提出基于动态时空特征周期性编码的公路交通流量预测方法,通过在3个真实公路交通流数据上的对比分析。
(1) 在PEMS04,PEMS07,PEMS08这3个真实交通流数据上对本研究所提出方法与其他9种主流的交通流预测模型进行试验对比,通过预测精度对比分析和预测步长对比分析,验证了本研究所提出模型具有良好的预测性能。
(2) 相比于基于循环神经网络建模的LSTM,本研究在3个数据集上的MAE,RMSE,MAPE平均降低8.79,10.69,8.41%,这说明空域特征的融入对于提升模型的预测性能具有重要作用。与ASTGCN相比,本研究模型具有更优的预测精度,揭示了周期性数据的时空嵌入编码能够有效挖掘隐藏在交通流数据中的多尺度时空动态相关性。相比于基于GCN建模的STGCN,本研究方法具有更好的预测性能,其不仅利用基于动态拓扑编码的空域特征提取模块,克服传统GCN模型使用预定义的邻接矩阵聚合节点空域特征,忽略路网异质性的问题。同时利用所构建的基于注意力机制约束的时域特征编码模块,克服传统GCN仅使用1D- CNN,长距离节点时域关系提取受限的问题。
(3) 在PEMS04数据集上的消融试验进一步证明本研究模型各模块对预测结果的影响,不仅验证了周期性交通流数据嵌入模块在挖掘交通流数据周期动态相关性方面的有效性,而且揭示了基于动态拓扑编码的空域特征提取模块在捕获路网数据动态空间相关性方面的优势,同时,验证了注意力机制约束的时域特征编码模块能够有效提取路网节点之间的长短期依赖关系,此外,也证明了自适应周期时空特征融合模块对于提升模型的预测精度具有一定的作用。
| [1] |
冯凤江, 杨增刊. 基于图卷积和注意力机制的高速公路交通流预测[J]. 公路交通科技, 2023, 40(9): 215-223. FENG Fengjiang, YANG Zengkan. Expressway traffic flow forecast based on graph convolution and attention mechanism[J]. Journal of Highway and Transportation Research and Development, 2023, 40(9): 215-223. DOI:10.3969/j.issn.1002-0268.2023.09.025 |
| [2] |
姚俊峰, 何瑞, 史童童, 等. 基于机器学习的交通流预测方法综述[J]. 交通运输工程学报, 2023, 23(3): 44-67. YAO Junfeng, HE Rui, SHI Tongtong, et al. Review on machine learning-based traffic flow prediction methods[J]. Journal of Traffic and Transportation Engineering, 2023, 23(3): 44-67. |
| [3] |
李文勇, 李俊卓, 王涛. 基于Box-Cox指数变换改进的ARIMA模型交通流预测方法[J]. 武汉理工大学学报(交通科学与工程版), 2020, 44(6): 974-977. LI Wenyong, LI Junzhao, WANG Tao. Improved ARIMA model traffic flow prediction method based on Box-Cox exponential transformation[J]. Journal of Wuhan University of Technology (Transportation Science & Engineering), 2020, 44(6): 974-977. DOI:10.3963/j.issn.2095-3844.2020.06.006 |
| [4] |
KUMAR S V, VANAJAKSHI L. Short-term traffic flow prediction using seasonal ARIMA model with limited input data[J].
European Transport Research Review, 2015, 7(3): 2101-2109.
|
| [5] |
KUMAR S V. Traffic flow prediction using Kalman filtering technique[J].
Procedia Engineering, 2017, 187: 582-587.
|
| [6] |
FENG X X, LING X Y, ZHENG H F, et al. Adaptive multi-kernel SVM with spatial-temporal correlation for short-term traffic flow prediction[J].
IEEE Transactions on Intelligent Transportation Systems, 2019, 20(6): 2001-2013.
|
| [7] |
霍豪, 沈金星, 郑长江. 基于KNN算法的公交到站时间预测[J]. 交通运输工程与信息学报, 2020, 18(4): 76-82, 102. HUO Hao, SHEN Jinxing, ZHENG Changjiang. Bus arrival time prediction based on KNN algorithm[J]. Journal of Transportation Engineering and Information, 2020, 18(4): 76-82, 102. DOI:10.3969/j.issn.1672-4747.2020.04.010 |
| [8] |
RASKAR C, NEMA S. Metaheuristic enabled modified hidden Markov model for traffic flow prediction[J/OL]. Computer Networks, 2022, 206: 108780. (2022-04-07)[2024-09-01]. https://doi.org/10.1016/j.comnet.2022.108780.
|
| [9] |
SUTSKEVER I, VINYALS O, QUOC V L. Sequence to sequence learning with neural networks[C]//Proceedings of the 28th International Conference on Neural Information Processing Systems (Volume 2). Cambridge, USA: MIT Press, 2014: 3104-3112.
|
| [10] |
CHUNG J, GULCEHRE C, CHO K, et al. Empirical evaluation of gated recurrent neural networks on sequence modeling[C]//Proceedings of NIPS 2014 Deep Learning and Representation Learning Workshop. Montreal: NIPS, 2014.
|
| [11] |
LI Y G, YU R, SHAHABI C, et al. Diffusion convolutional recurrent neural network: Data-driven traffic forecasting[C]//Proceedings of the 6th International Conference on Learning Representations (ICLR). Vancouver: ICLR Organizing Committee, 2018.
|
| [12] |
JIANG W W, LUO J Y, HE M, et al. Graph neural network for traffic forecasting: The research progress[J].
ISPRS International Journal of Geo-Information, 2023, 12(3): 1-35.
|
| [13] |
YU B, YIN H T, ZHU Z X. Spatio-temporal graph convolutional networks: A deep learning framework for traffic forecasting[C]//Proceedings of the 27th International Joint Conference on Artificial Intelligence. New York: ACM, 2018: 3634-3640.
|
| [14] |
ZHAO Y J, LIN Y F, WEN H M, et al. Spatial-temporal position-aware graph convolution networks for traffic flow forecasting[J].
IEEE Transactions on Intelligent Transportation Systems, 2023, 24(8): 8650-8666.
DOI:10.1109/TITS.2022.3220089 |
| [15] |
LIU A Y, ZHANG Y Y. Spatial-temporal dynamic graph convolutional network with interactive learning for traffic forecasting[J].
IEEE Transactions on Intelligent Transportation Systems, 2024, 25(7): 7645-7660.
DOI:10.1109/TITS.2024.3362145 |
| [16] |
GUO S N, LIN Y F, FENG N, et al. Attention based spatial-temporal graph convolutional networks for traffic flow forecasting[C]//Proceedings of the AAAI Conference on Artificial Intelligence, Washington, D.C. : AAAI, 2019: 922-929.
|
| [17] |
雷斌, 李佳璐, 张鹏, 等. 基于多图时空图卷积模型的城市交通流长时预测[J]. 公路交通科技, 2024, 41(4): 204-213. LEI Bin, LI Jialu, ZHANG Peng, et al. Long term prediction on urban traffic flow based on multi-source spatio-temporal graph convolutional neural network model[J]. Journal of Highway and Transportation Research and Development, 2024, 41(4): 204-213. DOI:10.3969/j.issn.1002-0268.2024.04.021 |
| [18] |
LI Q, YANG X, WANG Y, et al. Spatial-temporal traffic modeling with a fusion graph reconstructed by tensor decomposition[J].
IEEE Transactions on Intelligent Transportation Systems, 2024, 25(2): 1749-1760.
DOI:10.1109/TITS.2023.3314134 |
| [19] |
梁秀霞, 夏曼曼, 何月阳, 等. 基于时空多头图注意力网络的交通流预测[J]. 电子学报, 2024, 52(2): 500-509. LIANG Xiuxia, XIA Manman, HE Yueyang, et al. Traffic flow prediction based on spatio-temporal multi-head graph attention network[J]. Acta Electronica Sinica, 2024, 52(2): 500-509. |
| [20] |
CHEN Y, ZHOU X K, ZHENG X Z, et al. Graph attention network with spatial-temporal clustering for traffic flow forecasting in intelligent transportation system[J].
IEEE Transactions on Intelligent Transportation Systems, 2023, 24(8): 8727-8737.
DOI:10.1109/TITS.2022.3208952 |
| [21] |
LI C H, ZHAO L L, ZHANG Z G. MTGCN: Multi-graph fusion based temporal-spatial convolution for traffic flow forecasting[C]//Proceedings of the IEEE 3rd International Conference on Computer Communication and Artificial Intelligence (CCAI). New York: IEEE, 2023: 75-80.
|
| [22] |
LIU Z, LIIN Y T, CAO Y, et al. Swin transformer: Hierarchical vision transformer using shifted windows[C]//Proceedings of 2021 IEEE/CVF International Conference on Computer Vision (ICCV). New York: IEEE, 2021: 9992-10002.
|
| [23] |
HUANG S T, WANG D L, WU X H, et al. DSANet: Dual self-attention network for multivariate time series forecasting[C]//Proceedings of the 28th ACM International Conference on Information and Knowledge Management. New York: Association for Computing Machinery, 2019: 2129-2132.
|
| [24] |
BAI L, YAO L, LI C, et al. Adaptive graph convolutional recurrent network for traffic forecasting[C]//Proceedings of the 34th Neural Information Processing Systems (NeurIPS). Montreal: NIPS, 2020: 17804-17815.
|
| [25] |
CHOI J, CHOI H, HWANG J, et al. Graph neural controlled differential equations for traffic forecasting[C]//Proceedings of the AAAI Conference on Artificial Intelligence. Washington, D.C. : AAAI, 2022(36): 6367-6374.
|
| [26] |
FANG Z, LONG Q Q, SONG G J, et al. Spatial-temporal Graph ODE networks for traffic flow forecasting[C]//Proceedings of the 27th ACM SIGKDD Conference on Knowledge Discovery & Data Mining. New York: Association for Computing Machinery, 2021: 364-373.
|