 2025, Vol. 42
2025, Vol. 42扩展功能
文章信息
- 潘芋燕, 张斌, 郭继孚, 陈艳艳, 赵慧雄.
- PAN Yuyan, ZHANG Bin, GUO Jifu, CHEN Yanyan, ZHAO Huixiong
- 基于交通流基本图的过饱和交通状态道路阻抗函数
- Road impedance function for oversaturated traffic state based on fundamental diagram
- 公路交通科技, 2025, 42(2): 1-12
- Journal of Highway and Transportation Research and Denelopment, 2025, 42(2): 1-12
- 10.3969/j.issn.1002-0268.2025.02.001
-
文章历史
- 收稿日期: 2022-09-30




 ,
, 2. 河北省公安厅交通科研所, 河北 石家庄 050052;
3. 北京交通发展研究院, 北京 100073
2. Traffic Research Institute of Hebei Provincial Public Security Department, Shijiazhuang, Hebei 050052, China;
3. Beijing Transport Institute, Beijing 100073, China
研究现有运营道路基础设施及未来投资的交通基础设施研究时,交通规划是其重要的组成部分。典型的交通规划4阶段包括:(1)交通发生与吸引;(2)交通分布;(3)交通方式划分;(4)交通量分配。其中最后一步交通量分配是通过道路阻抗函数来量化交通流量对出行时间成本的影响[1-2]。道路阻抗模型是描述出行者从出发地到目的地所经过路段上的交通量和交通延误之间的函数关系,它是静态交通分配的重要组成部分,是描述城市交通网络状态的重要参数[3]。对道路阻抗函数的研究,实质上需要确定行程时间与道路交通量[4]、道路行驶条件之间的相互关系。此外,道路阻抗函数的拟合精确度及适用性可直接影响到道路组织诱导方案、交通分配方案和交通控制方案的质量[5]。因此,研究符合道路交通流属性及交通网络状态的道路阻抗函数至关重要。
目前广泛采用的道路阻抗函数是美国联邦公路局提出的BPR函数[6],它适用于估计高速公路上交通流的运行情况。为了提高BPR函数的估计精确度,在实际应用中,国内外学者及工程师对其进行了各种修正和探索。Davidson[7]基于排队论提出改进的阻抗函数,该模型认为当道路交通量达到道路容量的时候,出行时间应该为无穷大;Akcelik[8]进一步修正Davidson阻抗函数,并利用坐标转换方法推导出了该模型与基于时间相关的函数表达形式;此外,Spiess[9]针对BPR函数中参数β过高以及当V/C≤1时函数的精度过低的问题,提出了Conical道路阻抗函数,并总结了标准道路阻抗函数应具备的7个条件。Zhou等[10]提出了一个基于排队模型的流量延误函数,该模型将宏观与中观模型建立联系,并且能够对饱和状态下的动态排队关系进行建模。
国内学者根据实测数据对传统道路阻抗函数进行了改进研究,提出了符合中国道路交通运行特性的阻抗函数。王炜[11]通过建立车速-流量关系提出适用于不同设计车速的模型,并解决了超饱和状态下的高峰小时交通流预测问题。王树盛[12]推导了路段流量和路段行程时间之间的关系式,并对模型进行指数抛物线拟合,结果表明该模型可替代传统BPR函数。姜桂艳等[13]建立了3种BPR函数修正模型,并通过仿真试验发现改进的BPR修正模型明显优于传统的BPR函数。此外,王素欣[14]、王文静[15]、汤莉莉[16]均对传统BPR函数进行改进研究。王飞[17]建立长短时记忆神经网络预测方法对传统BPR函数进行改进。姚志洪等[18]基于经典BPR函数,提出了考虑自动驾驶车辆的混合交通流路段阻抗函数模型。温惠英等[19]提出了利用路段行程时间波动性建立道路阻抗函数,该方法利用全有/全无方法进行交通分配。此外,陈旭等[20]总结出目前道路阻抗研究中存在的问题,并指出未来研究适用于自动驾驶的阻抗函数具有重要意义。
对交通流基本图的研究始于Rakha等 [21]提出的直线型关系模型,该模型具有开创性意义。此后对于交通流三参数的关系研究有Greenber提出对数关系模型、Underwood提出指数模型、Edie提出分段指数模型、Drew、Pipes提出曲线族模型。此外Rakha[22]提出适用于城市快速路的且易于标定的四参数单一结构模型,该模型实现了宏观与微观交通流模型之间的转换。Ni等[23]结合物理和人为因素,提出宏观稳态控制、微观纵向控制的交通流模型。Cheng等[24]提出适用于广泛交通密度下的S形3参数交通流模型(S3模型)。此外,美国HCM手册[25]也对速度-密度-流量关系曲线进行了大量研究。选取合适的交通流模型对真实观测数据进行拟合,可以得到道路交通流的关键参数,这对过饱和交通情况的建模及分析具有重要意义。
综上所述,目前对道路阻抗函数的研究主要分为两类,第一类是通过改进传统BPR函数的模型参数和表达式等方式,建立更精确的道路阻抗函数。第二类是基于实测数据对已有的道路阻抗函数进行模型参数校正,以使其更符合本地交通流实际运行状态。随着交通拥堵的日益加剧,研究道路拥挤情况下的阻抗函数具有重要实际意义,岳昊等[26]、王殿海等[27]均对拥堵交通流建模做了相关研究。但是,现有文献缺乏将道路宏观交通流模型与道路阻抗函数相结合的研究。因此,本研究在已有研究成果的基础上,基于适用于拥堵情况下的交通流基本图,提出了改进的道路阻抗函数。该道路阻抗函数能够准确地分析交通延误并反映拥堵交通流的实际运行规律。此外,利用实测交通数据对道路阻抗函数进行模型验证,并与现有的经典道路阻抗函数进行对比试验,以评估所提出模型适用性及精确度。
1 经典BPR道路阻抗函数分析为量化道路阻抗对出行者出行路径选择的影响,把握交通量在路网上的分配,缓解因供需不匹配导致的拥堵问题,众多学者对道路阻抗函数进行了深入研究,取得了较多成果。以BPR函数为代表的一系列道路阻抗模型早已广泛应用于交通分配和路网规划中。
1.1 BPR函数1964年美国联邦公路局对大量高速路路段进行交通调查,并基于此总结了路段行程时间和道路流量之间的函数关系,提出了BPR函数,该模型对道路阻抗的实质把握非常准确且具有良好的数学性质,在国际上应用最为广泛,其数学表达式如式(1)所示:
|
(1) |
式中,tt为车辆通过路段的行程时间;t0为车辆通过路段的自由流行程时间;V为路段的交通流量;C为路段的通行能力;α, β为待标定参数,美国联邦公路局建议取α=0.15, β=4。
BPR函数模型参数较少,易于校正,且具有良好的数学性质(如单调性和可导性)。但是由于BPR函数适用于高速公路,在标定时未考虑到交叉口对道路的影响,因此在应用到城市道路时需要做模型改进。此外,BPR函数无法捕捉车辆排队的形成、传播以及消散的演化过程,当V/C介于0.8到1.0之间时,会高估行程时间;当V/C大于1.0时,会低估行程时间。
1.2 V/C分析道路阻抗函数中的V/C是实际的交通流量与相应路段的饱和通行能力的比值,通常又称为饱和度。当饱和度小于1时,通过实测数据进行速度-V/C关系拟合,可以准确反映出道路欠饱和交通状态的情况。而当饱和度大于1时,道路阻抗函数中的V/C表示超过道路通行能力时的交通需求与供给之间的关系,而在实测数据中,无法直接观测到V/C大于1的情况。因此,在实际的交通研究工作中,研究人员通过实测数据,对V/C进行图形及数学拟合将V/C超过1的情况可视化。美国弗洛里达州交通部门[28]和中国学者王素欣等[14]采用数据对称的方法来表述过饱和交通状态下的道路需求与行程时间及速度之间的关系。学者Kucharski和Drabicki[29]提出了用K/Kc来替代V/C的密度替换方法估计道路行程时间和道路需求之间的关系。此外,Huntsinger和Rouphail[30]借鉴计算过饱和信号交叉口需求的方法,提出需求排队的方法,进一步得到行程时间和道路流量之间的关系。
以上文献研究通过不同方法计算了过饱和交通系统的道路阻抗,但是已有文献中缺乏将道路交通流模型与道路阻抗函数相结合的研究,因此本研究从交通流基本图入手,通过公式推导,构建了适用于过饱和交通系统的道路阻抗函数关系。
2 基于交通流模型的道路阻抗函数构建 2.1 过饱和交通系统分析城市快速路交通拥堵的主要特征表现为,当车流经过交通瓶颈,由于受到通行能力的限制,车流速度降低并低于交通状态划分阈值临界速度vc,从自由流状态开始变为拥堵流状态,从而在交通瓶颈及上游区域形成过饱和交通系统。如图 1(a)所示,从时空角度刻画车辆经过交通瓶颈的轨迹,车辆通过拥堵段的总行程时间包括自由流行程时间与延误时间。在过饱和交通系统中,交通流参数有如图 1(b)所示的基本图关系。上半部分A区域为欠饱和状态,此时车辆之间相互干扰较少,随着交通流量增加,车辆之间干扰变大,车速下降,形成下半部分饱和交通流B区域。欠饱和交通状态和饱和交通状态划分的阈值为临界速度vc。在拥堵状态下,道路检测器观测到的车流量并非道路真实需求,实际的道路需求远远大于检测到的路段流量,即为过饱和交通系统C区域,与之相对应的行程时间和延误分别为图 1(c)和图 1(d)。随着道路上流量的增加,道路的行程时间和延误逐渐增大。

|
| 图 1 过饱和交通系统中时空轨迹及速度、行程时间、延误与流量之间关系 Fig. 1 Relation of spatio-temporal trajectory and speed, travel time, and delay with flow in oversaturated state |
| |
2.2 基于交通流基本图的道路阻抗函数构建
交通流基本图不但可以用于宏观交通控制[31],也可以用于中观交通参数识别,其中流量-密度-速度之间关系如图 2所示,其中vf为自由流速度;vc为临界速度;kc为临界密度;kj为堵塞密度;c为通行能力。

|
| 图 2 交通流基本图中流量-密度-速度之间关系 Fig. 2 Flow-density-speed relation in fundamental diagram |
| |
本研究选取Cheng等[24]提出的S形交通流模型(S3模型),该模型可以描述各种交通密度下的交通流,尤其适用于过饱和拥堵交通系统,模型如式(2)所示:
|
(2) |
式中,v为速度;k为密度;vf为自由流速度;kc为临界密度;m为参数。
进一步,我们根据q=kv守恒定律,可以推导得到流量-密度关系如式(3)所示:
|
(3) |
当道路密度k达到临界密度kc时,此时道路流量达到通行能力c,如图 2所示,我们可以推导得到式(4):
|
(4) |
假设道路路段长为L,则进一步可以推导得到式(5):
|
(5) |
式中,t0为自由流行程时间;t为行程时间;q为流量;c为通行能力。
对式(5)进行化简可以得到计算行程时间与道路流量之间关系的公式,如式(6)所示:
|
(6) |
式(6)所反映的路段流量与行程时间之间的关系可以用图 3表示,其中m取值为2,曲线分为两部分,以V/C=1.0为拐点,图中上半部分对应式(6)中的加号部分,图中下半部分点对应式(6)中减号部分。

|
| 图 3 路段流量与行程时间之间的分段关系 Fig. 3 Piecewise relation between road section flow and travel time |
| |
在式(2)中,m取值范围为1≤m≤8,进一步对式(6)取不同的m值,结果如图 4所示,可以发现m值的不同,不会影响曲线的走势,但是会影响曲线的波动范围。

|
| 图 4 不同参数m对应的流量与行程时间 Fig. 4 Flow and travel time corresponding to different m values |
| |
进一步分析图 3,当流量由0开始增大时,路段行程时间开始增加,当路段流量达到最大通行能力时,此时函数达到图中的拐点(即V/C=1)。而当车流继续增加时,道路上车辆进入拥挤状态,此时图 3无法反映真实的道路需求与行程时间之间的关系。因此采用文献中介绍的数据对称法[28],将超过通行能力时的车流量转换为道路需求,即将图 3中的上半部分曲线沿着V/C=1作对称分析,得到道路流量与行程时间之间的关系图,如图 5所示。由此可见,该函数关系呈单调趋势,随着道路上流量的增加,道路的行程时间增大,可以表明该模型能够准确反映出路段交通需求与出行时间之间的函数关系。

|
| 图 5 路段流量与行程时间之间的单调关系 Fig. 5 Monotonous relation between road section flow and travel time |
| |
因此,本研究提出的基于交通流基本图的道路阻抗函数如式(7)所示。
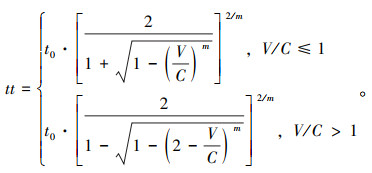
|
(7) |
本研究提出基于交通流基本图的道路阻抗函数模型校准框架,该模型框架遵循静态交通分配系统。如图 6所示,框架开始选取适用于过饱和交通系统的交通流模型(S3模型),推导出路段的交通流关键参数,根据临界速度vc,可以将交通状态划分为欠饱和交通流和过饱和交通流。在此基础上,利用所提出的道路阻抗模型估计不同交通状态下的行程时间和速度。最后,我们使用观测数据来验证所提出模型的有效性。本研究选取的模型评价指标包括均方根误差(RMSE),平均绝对误差(MAE),确定系数(R2)。研究框架如表 1所示。

|
| 图 6 基于交通流基本图的道路阻抗函数模型校正流程 Fig. 6 Road impedance function model calibration process based on fundamental diagram |
| |
| 输入 | 选定观测路段,输入道路基本观测数据,即速度、流量、密度 |
| 输出 | 校正参数α, β, m,模型估计的行程时间和速度 |
| 第1步 | 基于交通流基本图,得到交通流关键参数,即自由流速度、临界速度、临界密度和通行能力 |
| 第2步 | 利用临界速度划分交通状态为欠饱和状态(不拥堵)和过饱和状态(拥堵) |
| 第3步 | 在欠饱和状态,根据本研究提出的道路阻抗模型,计算行程时间和速度 |
| 第4步 | 在过饱和状态,基于本研究提出的道路阻抗模型,计算过饱和情况下的行程时间和速度 |
| 第5步 | 使用最小二乘法进行模型拟合,拟合得到模型未知参数α, β, m |
| 第6步 | 评估观测值与模型估计值之间的各类指标值 |
3 实例验证
为了进一步验证本研究提出模型的有效性,选取洛杉矶交通廊道I-405和北京西三环交通廊道进行实例验证,用道路观测的真实交通数据对模型进行拟合和评价。选取城市快速路作为研究对象,有助于更加准确地分析交通拥堵,减少交通延误[32-33]。
3.1 洛杉矶案例描述本案例的数据来源于美国加州交通运输部的PeMS系统,采集地点为洛杉矶交通廊道I-405,绝对里程为(9.42-14.59)的共12个探测器,采集时间为2017年7月5日(7 : 00—22 : 00)。数据包含流量、速度、占有率。通过式(8)可以将占有率转换为密度。图 7为该廊道的速度热力图,从图中可以看出,每个探测器的拥堵时间及平均时长范围,探测器3所在的位置为该廊道的交通瓶颈。
|
(8) |

|
| 图 7 洛杉矶案例廊道拥堵图 Fig. 7 Corridor congestion map of Los Angeles case |
| |
式中,occ为车辆占有率;l为平均车辆长度;d为探测器区域。
数据所反映的经典交通流特征如图 8所示,包括速度-密度、流量-密度、流量-速度特征,符合交通流基本图特性,以此说明数据的可靠性很高。用交通流模型S3模型对数据进行拟合,模型公式为式(2)~(3),得到交通流关键参数如表 2所示。分析表 2可知,道路自由流速度为70 km/h,当道路速度低于50 km/h时,道路进入拥堵状态,瓶颈处拥堵时的实际通行能力为1 815 veh/hr/ln。

|
| 图 8 洛杉矶案例交通流基本图 Fig. 8 Fundamental diagram of Los Angeles case |
| |
| 自由流速度/ (km·h―1) |
临界速度/ (km·h―1) |
临界密度/ [(veh·km―1)·ln―1] |
通行能力/ [(veh·h―1)·ln―1] |
| 70 | 50 | 36 | 1 815 |
3.2 洛杉矶案例结果分析
由计算行程时间的式(1)经过变换可以得到计算速度的公式,如式(9)所示,V为流量;C为路段的通行能力;α, β为待校正参数;vf为自由流速度。
|
(9) |
在现有文献中选取计算交通阻抗的方法,选取HCM中的参考值α=0.15, β=4以及根据实测数据拟合出的不同α和β值,将道路观测速度与各种模型计算出的速度作对比,结果如表 3所示。我们选择的对比模型为1.2中介绍的数据对称法、密度替换法和需求排队法。
| 方法 | α | β | m | RMSE | MAE | R2 |
| 数据对称法 | 0.15 | 4 | — | 15.62 | 9.80 | 0.89 |
| 0.33 | 10.38 | — | 3.88 | 2.93 | 0.96 | |
| 密度替换法 | 0.15 | 4 | — | 10.96 | 7.44 | 0.88 |
| 0.62 | 3.07 | — | 3.53 | 2.66 | 0.97 | |
| 排队需求法 | 0.15 | 4 | — | 17.72 | 10.92 | 0.82 |
| 0.33 | 20.48 | — | 3.53 | 2.47 | 0.97 | |
| 本研究方法 | — | — | 1.85 | 3.44 | 2.13 | 0.97 |
对比结果显示,本研究所提出的模型与其他方法相比,模型参数较少(只有一个参数m),且具有相对较少的误差值,其中RMSE和MAE值均小于其他方法,说明本研究所提方法能够用于计算道路阻抗且可以反映道路交通的真实情况。此外,当模型参数取固定的参考值α=0.15, β=4时,得到的评价指标结果较大,说明模型参数的参考值并不适用于本研究案例。图 9为洛杉矶案例观测速度与模型估计速度对比结果图。

|
| 图 9 洛杉矶案例观测速度与模型估计速度对比 Fig. 9 Observed speed v.s. estimated speeds with variou methods for Los Angeles case |
| |
3.3 北京案例描述
本案例的数据采集地点为中国北京西三环廊道,采集时间为2018年6月8日(6 : 00—12 : 00),共12个探测器,数据包含流量、速度。通过公式q=kv可以计算得到道路车流密度。图 10展示了该廊道路段的速度热力图,从图中可以看出,每个探测器的拥堵时间及平均时长,探测器3所在的位置为瓶颈位置。

|
| 图 10 北京案例廊道拥堵图 Fig. 10 Corridor congestion map of Beijing case |
| |
数据所反映的交通流特征如图 11所示,包括密度-速度、流量-密度,流量-速度特征,符合交通流基本图特性,以此说明数据的可靠性很高。选用S3模型对数据进行拟合得到交通流关键参数如表 4所示。分析表 4可知,道路自由流速度为62 km/h,当道路速度低于34 km/h时,道路进入拥堵状态,瓶颈处拥堵时的实际通行能力为1 220 veh/ (h·ln―1)。

|
| 图 11 北京案例交通流基本图 Fig. 11 Fundamental diagram of Beijing case |
| |
| 自由流速度/ (km·h―1) |
临界速度/ (km·h―1) |
临界密度/ [(veh·km―1)·ln―1] |
通行能力/ [(veh·h―1)·ln―1] |
| 62 | 34 | 36 | 1 220 |
3.4 北京案例结果分析
同理用式(9)将计算道路行程时间公式转换为计算车辆速度。我们选取HCM中的参考值α=0.15, β=4以及根据实测数据拟合出不同的α和β值,将真实测得的速度与各种模型计算出的速度作对比。同样的,我们这里选择的对比模型为1.2中介绍的数据对称法、密度替换法和需求排队法。
结果如表 5所示,当模型参数取固定的参考值α=0.15, β=4时,得到的评价指标结果较大,而本论文所提出的方法相较于数据对称法、密度替换法和需求排队法具有较少的RMSE和MAE。图 12为北京案例中观测速度数据与模型估计速度数据对比结果图。
| 方法 | α | β | m | RMSE | MAE | R2 |
| 数据对称法 | 0.15 | 4 | — | 29.96 | 26.9 | 0.17 |
| 2.03 | 3.88 | — | 7.99 | 5.04 | 0.71 | |
| 密度替换法 | 0.15 | 4 | — | 13.85 | 12.08 | 0.76 |
| 0.81 | 2.23 | — | 3.56 | 2.99 | 0.97 | |
| 排队需求法 | 0.15 | 4 | — | 26.91 | 24.04 | 0.36 |
| 1.35 | 2.97 | — | 6.91 | 5.33 | 0.82 | |
| 本研究方法 | — | — | 2.5 | 3.54 | 2.13 | 0.97 |

|
| 图 12 北京案例观测速度与模型估计速度对比 Fig. 12 Observed speed v.s. estimated speed with various methods for Beijing case |
| |
3.5 实例结果对比及行程时间指数分析
路段的实际通行时间与自由流情况下的通行时间之比称为路段的行程时间指数(Travel Time Index,TTI)。自由流通行时间是指在交通流量较小,路况良好的情况下,车辆在路段上行驶所需的时间。而实际通行时间是指在实际交通流量较大、路况较为拥堵的情况下,车辆在路段上行驶所需的时间。因此,路段的行程时间指数越高,意味着该路段的交通拥堵程度越高,车辆行驶所需的时间相对于自由流情况下的时间也会更长。行程时间指数通常被用于衡量交通拥堵的程度,并且经常被用于交通规划和管理中。
对案例验证结果进一步分析,当V/C=1时,对于BPR函数,α=0.15, β=4,此时t/t0=1.15。说明在美国联邦公路局推荐参数下,道路达到饱和状态时,单位路段实际通行时间是自由流通行时间的1.15倍。而对于本研究提出的道路阻抗函数式(7),在洛杉矶案例中,当V/C=1时,m=1.85,此时t/t0=2.12。这说明经过实测数据拟合模型,得到洛杉矶案例的延误率为2.12。而在北京案例中,当V/C=1时,m=2.5此时t/t0=1.74,此时的延误率为1.74。两个案例中的延误率均大于由BPR函数根据参数参考值α=0.15, β=4得到的1.15。而通过表 3和表 5我们可以发现,使用参考参数值得到的模型拟合结果较差,其模型精度均低于本研究提出的模型结果。因此,本研究提出的模型能够更准确地反映道路交通运行状态,其计算得到的延误率更具有参考价值,对交通拥堵的估计效果更显著。
对比洛杉矶案例和北京案例可以发现,洛杉矶案例中延误率的值大于北京案例的延误率值,表明洛杉矶案例比北京案例延误时间更长,通过单位路段的平均拥堵时间更持久。此外,对比表 2和表 5可以发现,洛杉矶案例中的瓶颈处自由流速度为70 km/h,临界车速为50 km/h,实际通行能力为1 815 veh/ (h·ln―1),北京案例自由流速度分别为62 km/h,临界车速为34 km/h,实际通行能力为1 220 veh/ (h·ln―1),洛杉矶案例中的关键参数(自由流速度、临界车速、实际通行能力)指标均大于北京案例,由此可见洛杉矶案例中车流量较大,车速运行较快。
3.6 与不同模型对比使用洛杉矶案例实测数据,选用4个经典常用的流量-延误函数与本研究所提模型做模型拟合对比分析,所选用模型包括BPR函数、Conical函数、Akcelik函数和CATS函数,并利用Excel中的Solver求解器对其参数进行优化求解。校准和优化结果如表 6所示,所选模型与实测数据的拟合曲线如图 13所示。图 13(a)为V/C比与行程时间的关系,图 13(b)为V/C比与速度的关系。研究发现,除CATS函数外,所有模型均表现良好,R2值均大于0.95。标定结果表明,Akcelik函数和Conical函数不能很好地拟合观测数据,尤其是Conical函数,无论是对模型参数进行迭代调整以获得最佳的视觉拟合,还是对模型参数进行优化以使平方和误差最小化,都不能得到最好地描述观测数据。
| 方法 | α | β | J | m | R2 | 当V=C时 tt/t0 |
当V=0时 tt/t0 |
| BPR | 0.56 | 3.26 | — | — | 0.964 5 | 1.56 | 1 |
| Conical | 4.79 | 1.20 | — | — | 0.967 6 | 2 | 0.95 |
| Akcelik | — | — | 3 266 | — | 0.958 3 | 1.26 | 1 |
| CATS | — | — | — | — | 0.838 1 | 2 | 1 |
| 本论文 | — | — | — | 1.85 | 0.968 6 | 2.12 | 1 |

|
| 图 13 不同方法结果对比 Fig. 13 Comparison of results with various methods |
| |
4 结论
道路阻抗函数的研究在交通分配和网络分析中起着十分重要的作用。本研究提出基于交通流模型适用于过饱和交通系统的道路阻抗函数,并以实测数据为基础进一步验证函数,结果表明该函数具有较高的适用性和准确性,对于中国及国外城市的交通需求分析和建立宏观交通模型具有借鉴作用。主要结论如下。
(1) 本研究基于适用于拥堵情况下的交通流基本图模型,通过公式推导出适用于过饱和交通状态下的计算路段流量与路段通行时间之间关系的阻抗函数。结果表明该方法可较为精确地反映交通流的真实运行情况,较现有文献中的方法其速度估计结果误差较小,两个案例中RMSE,MAE均低于现有文献中的方法。
(2) 模型计算表明,洛杉矶案例中行程时间指数(平均行程时间与自由流下行程时间之比)为2.12,北京案例中行程时间指数为1.74。路段的行程时间指数越高,意味着该路段的交通拥堵程度越高。因此,洛杉矶案例比北京案例延误时间更长,通过单位路段的平均拥堵时间更长。
(3) 本研究提出的方法只有一个未知参数需要校正,从而简化其在模型实际工程中的应用。此外,将交通流模型与道路阻抗函数相结合,可以更好地从不同的角度捕捉交通流运行特性,尤其是在过饱和交通拥堵系统下,所提方法能够准确计算过饱和交通拥堵系统下的道路阻抗,为交通分配提供了良好基础。
本研究存在一些不足和局限,主要总结如下。
(1) 未考虑特殊事件及特殊场景下模型的适用性,例如雨雪天气、交通事故、施工区等场景,因此在未来研究,需要对更多的案例场景做模型测试。
(2) 未基于排队模型建立道路阻抗函数与拥堵排队之间的关系,尤其针对道路发生排队后溢现象等复杂场景下的建模与分析,这也是未来需要解决的重要方向。
| [1] |
LI W, CHEN Y, PAN Y, et al. An improved spatio-temporal network traffic flow prediction method based on impedance matrix[J].
Journal of Highway and Transportation Research and Development, 2024, 18(2): 67-75.
|
| [2] |
PAN Y, CHENG Q, LI A, et al. Analysis of congestion key parameters, dynamic discharge process, and capacity estimation at urban freeway bottlenecks: A case study in Beijing, China[J].
Transportation Letters, 2024, 1-20.
|
| [3] |
PAN Y, GUO J, CHEN Y. Calibration of dynamic volume-delay functions: A rolling horizon-based parsimonious modeling perspective[J].
Transportation Research Record, 2022, 2676(2): 606-620.
DOI:10.1177/03611981211044727 |
| [4] |
黄敏, 薛田莉, 周锦荣, 等. 考虑交通信号和交通密度的城市路段个体行程时间建模[J]. 公路交通科技, 2024, 41(7): 185-193. HUANG Min, XUE Tianli, ZHOU Jinrong, et al. Individual travel time modelling of urban road section considering traffic signal and density[J]. Journal of Highway and Transportation Research and Development, 2024, 41(7): 185-193. DOI:10.3969/j.issn.1002-0268.2024.07.021 |
| [5] |
赵慧雄, 陈艳艳, 张斌, 等. 考虑交通和环境效益的公交优先信号配时研究[J]. 公路交通科技, 2024, 41(2): 212-222. ZHAO Huixiong, CHEN Yanyan, ZHANG Bin, et al. Study on transit signal priority timing considering traffic and environmental benefit[J]. Journal of Highway and Transportation Research and Development, 2024, 41(2): 212-222. DOI:10.3969/j.issn.1002-0268.2024.02.022 |
| [6] |
PAN Y, ZHENG H, GUO J, et al. Modified volume-delay function based on traffic fundamental diagram: A practical calibration framework for estimating congested and uncongested conditions[J].
Journal of Transportation Engineering, Part A: Systems, 2023, 149(11): 04023112.
DOI:10.1061/JTEPBS.TEENG-7903 |
| [7] |
DAVIDSON K B. The Theoretical basis of a flow travel-time relationship for use in transportation planning[J].
Australian Road Research, 1978, 8(1): 32-35.
|
| [8] |
AKCELIK R. Travel time function for transport planning purposes: Davidson's function, its time dependent form and alternative travel time function[J].
Australian Road Research, 1991, 21(3): 49-59.
|
| [9] |
SPIESS H. Conical volume-delay functions[J].
Transportation Science, 1990, 24(2): 153-158.
DOI:10.1287/trsc.24.2.153 |
| [10] |
ZHOU X, CHENG Q, WU X, et al. A meso-to-macro cross-resolution performance approach for connecting polynomial arrival queue model to volume-delay function with inflow demand-to-capacity ratio[J].
Multimodal Transportation, 2022, 1(2): 100017.
DOI:10.1016/j.multra.2022.100017 |
| [11] |
王炜. 公路交通流车速-流量实用关系模型[J]. 东南大学学报, 2003, 33(4): 487-491. WANG Wei. Practical speed-flow relationship model of highway traffic-flow[J]. Journal of the Southeast University, 2003, 33(4): 487-491. |
| [12] |
王树盛, 黄卫, 陆振波. 路阻函数关系式推导及其拟合分析研究[J]. 公路交通科技, 2006, 23(4): 107-110. WANG Shusheng, HUANG Wei, LU Zhenbo. Deduction of link performance function and its regression analysis[J]. Journal of Highway and Transportation Research and Development, 2006, 23(4): 107-110. DOI:10.3969/j.issn.1002-0268.2006.04.026 |
| [13] |
姜桂艳, 李继伟, 张春勤. 城市主干路路段行程时间估计的BPR修正模型[J]. 西南交通大学学报, 2010, 45(1): 124-129. JIANG Guiyan, LI Jiwei, ZHANG Chunqin. Modified BPR functions for travel time estimation of urban arterial road segment[J]. Journal of Southwest Jiaotong University, 2010, 45(1): 124-129. |
| [14] |
王素欣, 王雷震, 高利, 等. BPR路阻函数的改进研究[J]. 武汉理工大学学报(交通科学与工程版), 2009, 33(3): 446-449. WANG Suxin, WANG Leizhen, GAO Li, et al. Improvement study on BPR link performance function[J]. Journal of Wuhan University of Technology (Transportation Science & Engineering), 2009, 33(3): 446-449. |
| [15] |
王文静, 敬明, 刘冬梅, 等. 基于LOGIT模型和BPR阻抗函数的容量限制-多路径交通分配研究[J]. 公路交通科技, 2012, 29(增1): 81-85, 134. WANG Wenjing, JING Ming, LIU Dongmei, et al. Study on capacity limitation-multipath routing traffic allocation based on LOGIT model and BPR impedance function[J]. Journal of Highway and Transportation Research and Development, 2012, 29(S1): 81-85, 134. DOI:10.3969/j.issn.1002-0268.2012.S1.015 |
| [16] |
汤莉莉, 谢加良. 基于BPR改进函数与V/C比的自动驾驶汽车路况预测与分析[J]. 长春师范大学学报, 2019, 38(10): 53-60. TANG Lili, XIE Jialiang. Road condition prediction and analysis of autonomous driving vehicles based on improved BPR function and V/C ratio[J]. Journal of Changchun Normal University, 2019, 38(10): 53-60. |
| [17] |
王飞, 徐维祥. 基于LSTM神经网络改进的路阻函数模型[J]. 浙江大学学报(工学版), 2021, 55(6): 1065-1071. WANG Fei, XU Weiyang. Improved model of road impedance function based on LSTM neural network[J]. Journal of Zhejiang University (Engineering Science), 2021, 55(6): 1065-1071. |
| [18] |
姚志洪, 郝慧君, 巫雪梅, 等. 考虑自动驾驶的混合交通流路段阻抗函数[J]. 交通运输工程与信息学报, 2021, 19(4): 1-12. YAO Zhihong, HAO Huijun, WU Xuemei, et al. Cost function of mixed traffic flow with autonomous driving[J]. Journal of Transportation Engineering and Information, 2021, 19(4): 1-12. |
| [19] |
温惠英, 卢德佑, 汤左淦. 考虑行程时间波动性的城市道路阻抗函数模型[J]. 公路工程, 2019, 44(3): 27-32. WEN Huiying, LU Deyou, TANG Zuogan. Urban road impedance function model considering the volatility of travel time[J]. Highway Engineering, 2019, 44(3): 27-32. |
| [20] |
陈旭, 陆丽丽, 曹祖平, 等. 道路阻抗函数研究综述[J]. 交通运输研究, 2020, 6(2): 30-39. CHEN Xu, LU Lili, CAO Zuping, et al. Review of studies on road impedance functions[J]. Transport Research, 2020, 6(2): 30-39. |
| [21] |
RAKHA H, CROWTHER B. Comparison of greenshields, pipes, and van aerde car-following and traffic stream models[J].
Transportation Research Record, 2002, 1802(1): 248-262.
|
| [22] |
RAKHA H. Validation of van aerde's simplified steadystate car-following and traffic stream model[J].
Transportation Letters, 2009, 1(3): 227-244.
|
| [23] |
NI D, LEONARD J D, JIA C, et al. Vehicle longitudinal control and traffic stream modeling[J].
Transportation Science, 2016, 50(3): 1016-1031.
|
| [24] |
CHENG Q, LIU Z, LIN Y, et al. An S-shaped three-parameter (S3) traffic stream model with consistent car following relationship[J].
Transportation Research Part B, 2021, 153: 246-271.
|
| [25] |
Highway Capacity Manual (HCM)[M]. Transportation Research Board, National Research Council, Washington, D.C., 2000.
|
| [26] |
岳昊, 张鹏, 刘晓玲, 等. 拥堵路网交通流均衡分配模型[J]. 哈尔滨工业大学学报, 2019, 51(9): 103-109. YUE Hao, ZHANG Peng, LIU Xiaoling, et al. The equilibrium model for congested traffic assignment in road networks[J]. Journal of Harbin Institute of Technology, 2019, 51(9): 103-109. |
| [27] |
王殿海, 胡佑薇, 蔡正义, 等. 基于BPR函数的城市道路间断流动态路阻模型[J]. 吉林大学学报(工学版), 2023, 53(7): 1951-1961. WANG Dianhai, HU Youwei, CAI Zhengyi, et al. Dynamic road resistance model of intermittent flow on urban roads based on BPR function[J]. Journal of Jilin University (Engineering and Technology Edition), 2023, 53(7): 1951-1961. |
| [28] |
MOSES R, MTOI E, RUEGG S, et al. Development of speed models for improving travel forecasting and highway performance evaluation[R]. Florida: Departure of Transportation, 2013.
|
| [29] |
KUCHARSKI R, DRABICKI A. Estimating macroscopic volume delay functions with the traffic density derived from measured speeds and flows[J].
Journal of Advanced Transportation, 2017, 2007: 1-10.
|
| [30] |
HUNTSINGER L F, ROUPHAIL N M. Bottleneck and queuing analysis: Calibrating volume-delay functions of travel demand models[J].
Transportation Research Record, 2011, 2255(1): 117-124.
|
| [31] |
姚顺雨, 卢维科, 毛剑楠, 等. 基于宏观基本图的交通控制有效性与路网稳定性研究[J]. 公路交通科技, 2024, 41(5): 152-160. YAO Shunyu, LU Weike, MAO Jiannan, et al. Study on traffic control effectiveness and road network stability based on macroscopic fundamental diagram[J]. Journal of Highway and Transportation Research and Development, 2024, 41(5): 152-160. DOI:10.3969/j.issn.1002-0268.2024.05.018 |
| [32] |
CHEN Y, LI S, PAN Y, et al. Urban expressway congestion forewarning based on slope change of traffic flow fundamental diagram[J].
Journal of Transportation Engineering, Part A: Systems, 2022, 148(6): 04022030.
DOI:10.1061/JTEPBS.0000687 |
| [33] |
潘芋燕, 郭继孚, 陈艳艳, 等. 基于交通流模型的城市快速路交通流特性分析--以北京, 洛杉矶为例[J]. 科学技术与工程, 2022, 22(36): 16238-16245. PAN Yuyan, GUO Jifu, CHEN Yanyan, et al. Analysis of urban expressway traffic flow characteristics based on traffic flow model: A case study of Beijing and Los Angeles[J]. Science Technology and Engineering, 2022, 22(36): 16238-16245. |