 2025, Vol. 42
2025, Vol. 42扩展功能
文章信息
- 辛超阳, 任春晓, 张禄, 周炜.
- XIN Chaoyang, REN Chunxiao, ZHANG Lu, ZHOU Wei
- 罐式车辆液体晃动等效阻尼摆模型研究
- Equivalent damping pendulum model for liquid sloshing in tank truck
- 公路交通科技, 2025, 42(1): 174-181
- Journal of Highway and Transportation Research and Denelopment, 2025, 42(1): 174-181
- 10.3969/j.issn.1002-0268.2025.01.019
-
文章历史
- 收稿日期: 2024-06-26




 ,
, 2. 运输车辆运行安全技术交通运输行业重点实验室,北京 100088
2. Key Laboratory of Operation Safety Technology on Transport Vehicles, Beijing 100088, China
道路运输罐式车辆作为液体危险品的主要道路载运工具[1],呈现重心高、体积大、液体扰动易引起重心偏移等特点,在行驶过程中,遇到紧急制动、转向操作或颠簸路面时,罐内液体晃动的冲击力和力矩对车辆行驶的安全与稳定性构成威胁, 导致车辆侧翻[2]、侧滑甩尾[3]等,进而引发严重的交通事故[4]。因此,研究罐内液体晃动机理尤为重要。
针对罐内液体晃动问题,已有研究主要运用流体晃动理论解析[5]、准静态模型[6]、等效机械模型[7]等方法研究液体晃动状态、晃动力及力矩。流体晃动理论解析法基于流体力学原理,建立势流模型[8]分析罐内液体的晃动行为。此方法被广泛用于罐内液体晃动冲击频率、周期以及液体黏度阻尼[9]等解析方面的研究。Han等[10]采用Galerkin方法求解考虑阻尼的液体晃动方程,研究了不同充液比下的晃荡频率。Modaressi等[11]探讨了在不同侧向加速度下,流体黏度阻尼对瞬态冲击的影响。Faltinsen等[12]采用多模态理论研究了圆柱形罐体二维液体晃动情况,以解析解的方式构造了精确的自然晃动模态。流体晃动理论解析法能够考虑到阻尼对罐内液体晃动特性的影响,但其理论模型较为复杂,难以与车辆模型耦合。
等效机械模型将液体晃动流体动力学问题等效为机械运动问题,有着与车辆模型耦合集成的优势[13]。郑雪莲[14]和任园园[15]等对液体晃动的等效机械摆模型进行了充分研究。杨秀建等[16]在摆模型参数方面,利用拟合方法研究了摆长与椭圆轴长、晃动液体质量与总液体质量之间的关系,可为后续研究者提供参考。但其将液体视为理想液体,未考虑到液体阻尼的影响。Lee等[17]推导了竖直圆柱罐体晃动等效摆模型的参数,并利用流体力学软件对流体从晃动初始状态到静止状态进行模型验证。孙文财等[18]基于拉格朗日方法推导了圆柱罐体内液体等效摆模型,在模型中未考虑到阻尼项的影响,一定程度上影响仿真的精度。
通过对现有研究回顾,发现利用流体晃动理论解析法对晃动阻尼的研究较为深入全面,而针对罐内液体晃动等效摆模型中考虑阻尼的研究则相对欠缺。基于以上分析,本研究考虑液体晃动中的阻尼耗散,对等效摆模型做进一步研究。在罐内液体受到侧向加速度激励下,采用朗拉格朗日方法构建含有阻尼项的等效摆运动方程,求解冲击力和冲击力矩,为高精度罐式车辆整车联合仿真模型提供支撑。同时,本研究还将探讨阻尼系数对非满载罐内液体冲击力的影响,为罐式车辆侧向稳定性[19]研究提供参考。
1 罐内液体晃动模型建模圆柱形罐体是主要的罐体类型,故本研究选取罐式车辆的圆柱罐体为研究对象,以罐内液体侧向晃动作为主要研究内容,将罐内液体视为无旋、不可压缩,且液体质量沿对称轴呈均匀分布。利用等效圆摆模型来描述液体一阶模态侧向冲击运动特性,建立坐标系如图 1所示,x轴沿车辆前行方向,y轴为水平向右,z轴垂直向上。

|
| 图 1 罐体坐标系示意图 Fig. 1 Schematic diagram of tank coordinate system |
| |
罐内液体受到外界侧向激励产生晃动振荡,振荡中心点在圆柱形截面中心。当罐内液体受到侧向力激励时,并非全部液体参与晃动,仍有部分液体处于静止,为此将液体总质量等效为晃动质量和静止质量[20]。在外界侧向加速度激励下罐内液体晃动等效摆模型如图 2所示。

|
| 图 2 液体晃动阻尼示意图 Fig. 2 Schematic diagram of liquid sloshing damping |
| |
图中,θ为晃动液体等效为摆球的摆动角度;lp为摆长;m为总液体质量;mp为晃动液体质量;m0为静止液体质量;R为罐体截面半径;ay为罐体所受侧向加速度激励;f为液体阻尼力。
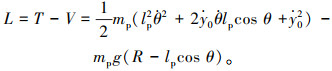
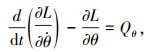
1.1 考虑阻尼的等效摆运动方程本研究采用拉格朗日方程对液体晃动等效阻尼摆运动方程进行推导,拉格朗日方程从能量角度描述物体的运动特性,方程定义如下:
|
(1) |
式中,L为拉格朗日函数(L=T-V, T为物体的动能,V为物体的势能);qk为运动系统自由度;Qk为对应的广义力。
罐体在外界侧向加速度激励作用下,罐内液体发生振荡移动,令沿y轴发生的位移y0,摆球的位置可表示为:
|
(2) |
则摆球速度及加速度如下:
|
(3) |
|
(4) |
摆球动能为:

|
(5) |
选取罐体底部平面为零势能平面,则摆球势能为:

|
(6) |
得到拉格朗日方程函数L为:
|
(7) |
根据拉格朗日方程定义,可得摆球的拉格朗日方程为:
|
(8) |
式中Qθ为等效阻力。
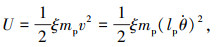
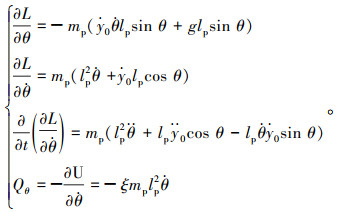
在现实流体环境中,由于存在液体内部黏性阻尼以及液体与罐体壁面之间产生的边界阻尼,液体晃动难免损失能量,会导致晃动的振幅随着时间的推移而衰减。为解释能量的逐渐损失,在摆模型中加入阻尼耗散。根据Quiroga对阻尼单摆系统的研究[21],将阻尼耗散等效为与摆球动能成正比,因此阻尼耗散可用式(9)表示:
|
(9) |
式中,ξ为无量纲阻尼系数;v为惯性坐标下摆球速度。
对式(7)和式(9)求导可得拉格朗日方程各项如下:
|
(10) |
把式(10)代入式(8)方程,得到考虑阻尼系数的等效摆运动方程。
|
(11) |
通过建立等效摆运动模型,模拟并求解出在外界激励下液体侧向晃动冲击力和力矩。液体对罐体的侧向晃动力可表示为:

|
(12) |
罐内液体晃动冲击力矩围绕侧倾轴产生,侧倾轴随着不同车辆条件而变化,难以准确估计。为求出晃动液体对罐体的冲击力矩,将液体在晃动过程中对罐体最低点施加的作用力所产生的力矩,定义为液体的冲击力矩。对等效摆模型分析可知,摆球对罐体最低点产生的力矩Mp为:
|
(13) |
式中,g为重力加速度;


|
(14) |

|
(15) |
因此,Mp写成行列式形式如下:

|
(16) |
整理可得液体晃动冲击力矩为:

|
(17) |
上述等效阻尼摆模型参数主要涉及液体晃动质量mp、液体晃动摆长lp和等效阻尼系数ξ等。液体晃动质量和摆长随罐内液体充液比的变化而变化,根据Ranganathan等[22]的研究成果,计算得出充液比0.1~0.9下的mp/m和lp/R的数值,如表 1所示。
| 充液比Δ | mp/m | lp/R |
| 0.1 | 0.927 6 | 0.957 224 |
| 0.2 | 0.849 3 | 0.910 046 |
| 0.3 | 0.764 4 | 0.860 951 |
| 0.4 | 0.678 1 | 0.801 901 |
| 0.5 | 0.582 8 | 0.733 95 |
| 0.6 | 0.483 0 | 0.660 579 |
| 0.7 | 0.380 8 | 0.572 69 |
| 0.8 | 0.268 4 | 0.465 01 |
| 0.9 | 0.143 3 | 0.320 027 |
液体内部具有黏性,会导致液体在晃动过程中耗散运动能量,即液体运动表现出一定的阻尼效应,同时由于不同液体黏性不同,晃动阻尼会随着罐内装载液体种类发生变化。除液体内部黏度外,液体与罐体壁之间边界层摩擦也是阻尼效应的主要影响因素。考虑罐内装载液体的黏性和液-固边界摩擦阻尼,其中典型的机油无量纲阻尼约为0~0.2,因此将模型中无量纲等效阻尼系数范围设置为0~0.2。
2.2 模型仿真结果本研究以某THT9401GHY罐车罐体为例,罐体半径R为1.1 m,额定载重质量近似30×103 kg。设定罐体充液比为0.1~0.9;作用在罐体上的侧向加速度为0.1g~0.4g;采用Simulink搭建模型,选取ODE求解器求解仿真液体晃动变化,仿真时间20 s,步长0.01 s。
基于构建的等效阻尼摆模型和未考虑阻尼的模型,在充液比0.6,侧向加速度0.4g瞬时激励条件下,考虑阻尼影响与不考虑阻尼影响,液体晃动两种情况下,模型参数随时间的变化曲线,如图 3所示。

|
| 图 3 考虑阻尼与不考虑阻尼两种情况下液体晃动模型参数随时间的变化曲线 Fig. 3 Curves of influences with or without damping on liquid sloshing varying with time |
| |
从图 3中可以看出,在首个晃动周期内,等效阻尼对液体摆角、冲击力和力矩峰值的影响相对较小,三者分别相对于无阻尼下降6.24%,6.01%,5.40%。随着时间的递进,考虑阻尼的摆动模型中液体摆角、冲击力和力矩的峰值呈现逐渐递减趋势,在20 s附近峰值分别约为首个晃动周期内峰值的38.98%,39.49%,37.38%。这一趋势显著符合摆锤运动阻尼规律,与文献[23]摆锤运动趋势相同。因此,本研究所建立的等效阻尼摆模型能够模拟罐内液体晃动情况,可作为液体晃动分析及后续罐车侧翻研究的基础。
3 液体晃动分析 3.1 晃动条件罐车行驶于不同的工况环境,其受到的外界侧向激励形式不同。罐车液体剧烈晃动多发生在车辆急转向时,罐车液体受到的外界侧向激励时间较短。因此,本研究选取施加侧向加速度激励持续时间3 s,仿真时间50 s,研究罐车行驶时罐内液体晃动的特性。
从图 4中可以看出,在激励持续阶段,由于侧向加速度激励作用,晃动冲击力和力矩偏向一侧,且峰值较高,远大于激励消散阶段。3 s后外界激励消散,在阻尼的作用下,液体晃动冲击力和力矩随时间变化逐渐下降,呈现指数式衰减形式。故而选取液体晃动冲击力对激励持续和激励消散阶段进行具体分析。

|
| 图 4 液体晃动冲击力和力矩随时间变化 Fig. 4 Liquid sloshing impact force and moment varying with time |
| |
3.2 激励持续阶段
当阻尼系数为0.1时,在激励持续阶段,不同充液比及侧向加速度对液体晃动冲击力及冲击力矩峰值的影响如图 5所示。从图中可以看出,加速度激励越大,液体晃动冲击力和冲击力矩峰值越高;在充液比0.1~0.5变化时,液体晃动冲击力和冲击力矩的峰值都随着充液比的升高而增大。在0.5~0.6时达到最大,说明此充液比下,液体晃动对罐车侧翻的影响最大,实际罐车应尽量避免在此附近装载;在充液比0.6~0.9变化时,晃动力和力矩的峰值都呈现减小趋势,其中,在侧向加速度0.4g,充液比0.8~0.9时,晃动力和力矩峰值降幅分别达到39.86%和43.57%。从安全角度考虑,充液比在0.9时比0.8时,液体晃动对罐车的行驶安全影响相对更低。

|
| 图 5 不同充液比下晃动冲击力和力矩峰值变化 Fig. 5 Peak variations of impact force and moment with different filling ratios |
| |
不同阻尼系数对液体的晃动冲击力和冲击力矩的影响不同。由图 6可以看出,在激励持续阶段,晃动冲击力的峰值随阻尼的增加出现微降,相比于不考虑阻尼,不同侧向加速度下,晃动冲击力峰值分别下降约3.62%,3.15%,2.64%,1.79%,变化幅度较小。这一结果说明,在外界激励持续阶段,罐体受到的冲击力主要受不同侧向加速度的影响,受装载液体阻尼影响有限。

|
| 图 6 不同阻尼系数对液体晃动力的影响 Fig. 6 Influences of different damping coefficients on liquid sloshing force |
| |
3.3 激励消散阶段
由图 4可以看出,阻尼在激励消散阶段对液体震荡存在明显衰减作用,具体表现为对震荡周期内的液体晃动冲击力峰值的抑制。因此,本研究以指数衰减函数对液体晃动冲击力波峰进行拟合。拟合函数如式(18)所示:

|
(18) |
式中,F为液体晃动冲击力;F0为晃动冲击力拟合曲线截距;α为衰减系数。
衰减系数的数值代表着阻尼对液体晃动的阻碍效果,衰减系数越大,表示阻尼效果越好。取充液比0.6,侧向加速度0.4g,阻尼系数0.1进行拟合,拟合曲线如图 7所示。拟合R2为0.96,表明公式的拟合效果较好,使用此公式能够解释液体晃动力波峰的变化。计算得出此时衰减系数为0.054 62。

|
| 图 7 液体晃动冲击力波峰拟合曲线 Fig. 7 Liquid sloshing impact force peak fitting curve |
| |
液体晃动冲击力的衰减程度受外界激励大小的影响。图 8为阻尼系数0.1时,不同侧向加速度下,衰减系数随充液比的变化图。从图中可以看出,衰减系数随着充液比升高而增大,表明在高充液比下,阻尼作用对液体晃动力波峰的抑制更明显。在同一充液比下,罐体受到的侧向加速度越小,衰减系数越大,表明阻尼在激励较低时,对液体晃动的抑制表现更佳。在充液比0.7附近时,不同激励水平下的衰减系数趋于0.059附近,此时阻尼效果趋同。在充液比0.7 ~ 0.9变化过程中,不同激励水平下的衰减系数均为大幅增加,增幅分别为33.59%,30.47%,25.47%,18.83%。结果表明,在高充液比下,阻尼起到的衰减效果更加显著,且激励水平越低,阻尼的衰减效果越显著。

|
| 图 8 衰减系数随充液比变化 Fig. 8 Attenuation coefficient varying with filling ratio |
| |
除了外界激励对液体晃动力的影响外,不同的充装液体也会影响液体晃动力的大小。图 9为侧向加速度0.2g下,衰减系数随阻尼的变化图。从图 9(a)中可以看出,在充液比0.1~0.9的变化过程中,不同阻尼下的衰减系数均大幅增加,增幅变化分别为30.33%~50.52%,15.17%~30.47%,11.49%~20.29%,9.27%~15.45%;从图 9(b)中可以看出,阻尼系数越高,衰减系数越大,两者呈现近似线性关系。在充液比0.7~0.9之间,各阻尼系数下的衰减系数变化幅度较0.3~0.7之间显著。印证了在充液比0.7之后,不同装载体阻尼对液体晃动力的衰减效果均大幅提升。

|
| 图 9 衰减系数随阻尼系数变化 Fig. 9 Attenuation coefficient varying with damping coefficient |
| |
液体晃动冲击力与晃动摆角和冲击力矩存在显著同步变化趋势,对晃动冲击力的分析结果同样适用于摆角和冲击力矩。
4 结论本研究重点建立了考虑阻尼的液体晃动等效圆摆模型,对比有无阻尼项的等效摆模型,所建模型可有效模拟罐内液体晃动的阻尼作用。并进一步分析了所建模型在不同激励阶段的效果,结论如下:
(1) 在充液比为0.5~0.6范围内时,液体晃动产生的冲击力和力矩最大。
(2) 在激励持续阶段,罐体晃动产生的冲击力主要受侧向激励的影响,受装载液体的阻尼特性影响较小。
(3) 在激励消散阶段,研究发现液体晃动力衰减系数在充液比0.7~0.9时,不同激励水平下衰减系数递增均超18%,表明阻尼在此阶段起到的衰减效果更加显著。
本研究构建的罐式车辆液体晃动等效阻尼圆摆模型,可与车辆模型结合形成车-液耦合模型,通过车辆模型输出侧向加速度到液体晃动模型、液体晃动模型输出液体侧向冲击力和冲击力矩到车辆模型,为液体晃动分析及后续罐车侧翻研究提供了基础。阻尼与晃动周期存在一定联系,目前,本研究仅探讨了阻尼对液体晃动摆角和力矩的影响,有关阻尼对液体晃动周期的影响有待进一步研究。
| [1] |
田诗慧, 王俊波, 范文姬, 等. 基于多源数据融合的危险货物道路运输运行监测[J]. 公路交通科技, 2023, 40(增2): 427-432, 452. TIAN Shihui, WANG Junbo, FAN Wenji, et al. Dangerous goods road transport monitoring based on multi-source data fusion[J]. Journal of Highway and Transportation Research and Development, 2023, 40(S2): 427-432, 452. |
| [2] |
胡晓明, 赵志国. 基于相平面分区的半挂液罐车稳定性控制[J]. 公路交通科技, 2015, 32(12): 151-158. HU Xiaoming, ZHAO Zhiguo. Stability control of liquid tank semi-trailer based on phase plane division[J]. Journal of Highway and Transportation Research and Development, 2015, 32(12): 151-158. |
| [3] |
高珊珊. 基于事故案例的危险品道路运输干扰源分析[J]. 公路交通科技, 2023, 40(8): 163-169, 176. GAO Shanshan. Analysis on disturbance source in road transport of dangerous goods based on accident cases[J]. Journal of Highway and Transportation Research and Development, 2023, 40(8): 163-169, 176. DOI:10.3969/j.issn.1002-0268.2023.08.022 |
| [4] |
曹建, 施式亮, 鲁义, 等. 2013—2018年罐车公路运输危化品事故分析[J]. 中国安全科学学报, 2020, 30(2): 119-126. CAO Jian, SHI Shiliang, LU Yi, et al. Analysis on tank transportation accidents of hazardous chemicals from 2013 to 2018[J]. China Safety Science Journal, 2020, 30(2): 119-126. |
| [5] |
AZADI S, JAFARI A, SAMADIAN M. Effect of parameters on roll dynamic response of an articulated vehicle carrying liquids[J].
Journal of Mechanical Science and Technology, 2014, 28(3): 837-848.
DOI:10.1007/s12206-013-1148-x |
| [6] |
何烈云, 刘强. 非满载罐式车侧倾稳定性的准静态等效力学模型[J]. 力学与实践, 2020, 42(3): 294-299. HE Lieyun, LIU Qiang. A Quasi-static equivalent mechanical model for roll stability of partially-filled tanker trucks[J]. Mechanics in Engineering, 2020, 42(3): 294-299. |
| [7] |
HAN M, DAI J, ANG K. Hydrodynamic aspects of moving vehicle with sloshing tanks[C]//MATEC Web of Conferences. Shanghai: EDP Sciences, 2018, 211: 15002.
|
| [8] |
JIN Xin, TANG Jin-bo, TANG Xiao-chun, et al. Effect of viscosity on sloshing in a rectangular tank with intermediate liquid depth[J].
Experimental Thermal and Fluid Science, 2020, 118: 138-148.
|
| [9] |
HASHEMINEJAD S M, SOLEIMANI H. An analytical solution for free liquid sloshing in a finite-length horizontal cylindrical container filled to an arbitrary depth[J].
Applied Mathematical Modelling, 2017, 48: 338-352.
DOI:10.1016/j.apm.2017.03.060 |
| [10] |
HAN Yueyang, ZHU Xiang, LI Tianyun, et al. A Semi-analytical study of the three-dimensional liquid sloshing in a horizontal cylindrical tank with an arbitrary liquid depth[J].
Ocean Engineering, 2021, 238: 109-122.
|
| [11] |
MODARESSI-TEHRANI K, RAKHEJA S, SEDAGHATI R. Analysis of the overturning moment caused by transient liquid slosh inside a partly filled moving tank[J].
Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2006, 220(3): 289-301.
DOI:10.1243/09544070D01705 |
| [12] |
FALTINSEN O M, TIMOKHA A N. A multimodal method for liquid sloshing in a two-dimensional circular tank[J].
Journal of Fluid Mechanics, 2010, 665: 457-479.
DOI:10.1017/S002211201000412X |
| [13] |
YANG X, FENG C. Investigation on the equivalent mechanical longitudinal fluid sloshing model for a partially filled tank vehicle[J].
International Journal of Vehicle Performance, 2020, 6(2): 200-233.
DOI:10.1504/IJVP.2020.106986 |
| [14] |
郑雪莲, 李显生, 任园园, 等. 非满载汽车罐车液体冲击等效机械模型[J]. 吉林大学学报(工学版), 2013, 43(6): 1488-1493. ZHENG Xuelian, LI Xiansheng, REN Yuanyuan, et al. Dynamic coupling simulation on roll stability of tank semi-trailer[J]. Journal of Jilin University(Engineering and Technology Edition), 2013, 43(6): 1488-1493. |
| [15] |
任园园, 李显生, 郑雪莲, 等. 液罐车精确动力学建模及其侧倾稳定性[J]. 上海交通大学学报, 2020, 54(3): 312-321. REN Yuanyuan, LI Xiansheng, ZHENG Xuelian, et al. Accurate dynamics modeling and roll stability of tank vehicle[J]. Journal of Shanghai Jiaotong University, 2020, 54(3): 312-321. |
| [16] |
杨秀建, 吴相稷, 邢云祥, 等. 非满载液罐半挂汽车列车侧向耦合动力学模型[J]. 中国公路学报, 2018, 31(11): 244-254. YANG Xiujian, WU Xiangshu, XING Yunxiang, et al. Lateral dynamics modeling for partly filled tractor semi-trailer tank vehicle[J]. China Journal of Highway and Transport, 2018, 31(11): 244-254. |
| [17] |
LEE D Y, CHO M H, CHOI H L, et al. Pendulum modeling of sloshing motion using particle swarm optimization[J].
International Journal of Aeronautical and Space Sciences, 2019, 20: 172-182.
|
| [18] |
孙文财, 李伟建, 张景海, 等. 罐式半挂车侧倾稳定性动态耦合仿真[J]. 吉林大学学报(工学版), 2020, 50(3): 980-986. SUN Wencai, LI Jianwei, ZHANG Jinghai, et al. Dynamic coupling simulation on roll stability of tank semi-trailer[J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(3): 980-986. |
| [19] |
瞿绘军, 房坤, 蔡彦伦. 液罐车侧倾稳定性的计算研究[J]. 公路交通科技, 2017, 34(增2): 64-68. QU Huijun, FANG Kun, CAI Yanlun. Research on rollover stability of tank truck[J]. Journal of Highway and Transportation Research and Development, 2017, 34(S2): 64-68. |
| [20] |
RUMOLD W. Modeling and simulation of vehicle carrying liquid cargo[J].
Multi-body System Dynamics, 2001, 5(4): 351-374.
|
| [21] |
QUIROGA G D, OSPINA-HENAO P A. Dynamics of damped oscillations: physical pendulum[J].
European Journal of Physics, 2017, 38(6): 65-80.
|
| [22] |
RANGANATHAN R, YING Y, MILES J B. Analysis of fluid slosh in partially filled tanks and their impact on the directional response of tank vehicles[J].
SAE Technical Paper Series, 1993.
|
| [23] |
何烈云, 刘天兰, 王冰睿, 等. 圆形截面罐体液体晃动的摆锤模型可行性研究[J]. 力学与实践, 2024, 46(5): 982-991. HE Lieyun, LIU Tianlan, WANG Bingrui, et al. Feasibility study on pendulum model for sloshing of fluid in circular section cargo tank trucks[J]. Mechanics in Engineering, 2024, 46(5): 982-991. |