 2024, Vol. 41
2024, Vol. 41扩展功能
文章信息
- 柳祖鹏, 谢晓峰, 陈玲娟.
- LIU Zu-peng, XIE Xiao-feng, CHEN Ling-juan
- 智能网联汽车的车队跟驰模型及仿真研究
- Platoon Following Model and Simulation of Intelligent Connected Vehicles
- 公路交通科技, 2024, 41(12): 9-20
- Journal of Highway and Transportation Research and Denelopment, 2024, 41(12): 9-20
- 10.3969/j.issn.1002-0268.2024.12.002
-
文章历史
- 收稿日期: 2022-06-14




 ,
, 随着汽车工业的迅猛发展,汽车保有量也逐年攀升,交通拥堵和事故多发现象已成为日常生活的常态化问题。现有道路网络也已无法承担起日益增长的交通流,交通拥堵成为亟待解决的重大问题。智能网联环境下,凭借V2X通信技术和车载传感器等设备,车与车、车与路侧设备(RSU)之间能够进行信息交互与共享。得益于跟驰模型和智能网联技术的大力发展,车与车之间能够通过信息传递来实现协同驾驶理念,从而推动了车辆队列的协同驾驶。面对日益严重的交通拥堵问题,对车辆队列的研究成为解决这一问题的关键途径之一。
车辆跟驰行为的构想最早起源于20世纪50年代初期,Reuschel和Pipes从运动学角度对交通流队列中的车辆进行了分析,Pipes提出了最早的跟驰模型,但该模型并未考虑后车存在的滞后性,所以有一定的局限性[1]。针对经典跟驰模型中存在的不足,越来越多的学者对现有跟驰理论的发展进行深入研究,提出了众多改进型跟驰模型,从而推动了车辆跟驰理论的发展。
安全距离模型是近些年来车辆跟驰研究的重点之一,该类模型提出的最初目的是为保证后跟随车与前导车有足够安全的距离来应对突发的制动情况,以保证不发生追尾事故,具有代表性的是Gipps模型。国内学者对于安全距离模型也有较多研究,曲昭伟等[2]基于OV模型改进的安全距离模型,车辆跟驰关系的准确性有显著提高。翟聪等[3]基于时变安全距离改进的耦合映射跟驰(CM)模型能够调节车队行驶速度,可有效缓解交通拥堵。高云峰等[4]考虑驾驶人对于车头间距的变化较敏感,对FVD模型进行改进建立跟驰模型。阴晓峰等[5]基于5G V2X技术创建了协同控制系统,针对系统决策层设计出安全距离模型,仿真验证了模型在不同跟随状态的可行性。
智能网联技术的不断发展推动着汽车行业产生了颠覆性变革,车辆跟驰模型是车辆组成编队的形成机制,而智能网联技术则为车队形成提供技术支撑。涉及到车辆队列的研究,不得不提到多智能体系统(MAS),该项技术的发展也为车辆队列研究提供了新的研究途径。关于这方面有较为广泛的研究,Guo等[6]对于多智能体系统有较为深入的研究,研究具备Lipschitz非线性多智能体系统的不敏感规律量化过程;陈珍萍等[7]基于多智能体系统,总结出研究队列稳定性的常用方法:一是在未形成队列的前提下,由若干辆车组成新编队, 二是在队列存在的前提下车辆加入当前队列;不同加入位置所带来的研究难度也是不尽相同,其中车辆从队列尾部加入是研究相对简便的一种方式。
关于车辆编队的形成与控制方式种类较多,主要有领航-跟随法[8-10]、基于行为法[11]、基于虚拟结构法[12]、人工势场法[13]等,不同方法对于构建车辆队列的原理不同,以上所提方法也是车队形成与控制研究的主流方法。
在车队信息安全方面,韩嘉成等[14]基于独立级联模型提出了恶意信息与免疫信息的双向传播模式,根据通信传输差异建立了双层信息传播模型,参考免疫机制提出了治愈车队的方法,提高了车队形式的安全性。
上述提到的关于安全距离跟驰模型的研究中,对于跟随车加速度变化情况并未过多涉及,本研究提出的考虑加速度变化的安全距离模型较为充分地反映了跟随车在跟驰过程中的加速度变化。根据周思等[15]研究中提出的智能网联车形成自治队列遵循的避免碰撞、尽量靠近和速度一致三原则为基础,基于最小安全距离跟驰模型,构建出考虑跟随车加速度变化的安全距离跟驰模型,并将其作为智能网联汽车跟驰车队的形成机制,探索基于信息交互和简单规则的群体智能形成过程。在智能网联环境下,基于领航跟随控制将车辆队列形成问题的研究简化为研究由若干前后相邻两车组成的领航跟随结构体,最后通过微观仿真对跟驰模型的可行性以及模型是否具备成为智能网联环境下跟驰车队的形成机制的科学性进行验证。
1 车辆制动理论分析研究前后两车在保持相同速度匀速行驶的状态下达到的最小安全跟驰距离,与汽车的制动距离有很大程度的关系。汽车制动过程描述如下[2]:当前导车遇到紧急状况突然减速,后跟随车检测到前车行驶状态改变,车辆经过通行延迟阶段后开始紧急制动,直到车辆完全停止。
1.1 车辆制动过程描述根据已有研究所示,假定前导车由匀速状态遇到紧急状况后突然减速,后跟随车检测到前导车行驶状态发生改变,从正常行驶到制动停止过程的加速度和制动力随时间的变化[16]如图 1所示。

|
| 图 1 减速度和制动力随时间变化 Fig. 1 Deceleration and braking force varying with time |
| |
其中,Fbrake为最大制动力;amax为最大减速度;Tbrake为整个制动过程所经历的时间。整个制动过程划分为5个阶段:当后车检测到紧急状况后并未立即采取制动措施。从感知信息到执行驾驶决策,要经历一段反应时间t1,反应时间内车辆处于匀速行驶状态;t2为车辆制动系统开始工作到产生制动力的时长,即制动器调整阶段,该阶段车辆仍处于匀速状态;t3为车辆从开始产生制动力和减速度至减速度达到最大的时长,从图 1中可知减速度随时间呈线性增长的趋势,直至达到最大减速度;t4为车辆以最大减速度匀减速的过程,t4结束后车辆制动停止;t5为车辆停止后,制动系统停止工作,制动力消散的过程。
1.2 制动距离计算公式假定前导车匀速状态行驶的速度为vi,后车制动前以vk匀速行驶,最大减速度为amax。当前导车遇到紧急状况后突然减速,后跟随车检测到前导车行驶状态改变后开始制动,车辆制动过程的示意如图 2所示。

|
| 图 2 车辆制动过程 Fig. 2 Vehicle braking process |
| |
(1) 车辆通信延迟反应阶段和制动器调整阶段,由于未产生制动力,后车以速度vk匀速行驶。车辆行驶距离由下式计算得:

|
(1) |

|
(2) |
(2) 制动系统开始工作并产生制动力阶段,减速度由零开始逐渐增大,该阶段车辆的速度变化和行驶距离由下式计算得:

|
(3) |

|
(4) |
|
(5) |
(3) 当减速度达到最大时,车辆以最大减速度作匀减速运动,直到速度为0,该阶段车辆的速度变化和行驶距离由下式计算得:

|
(6) |

|
(7) |
|
(8) |
|
(9) |
(4) 车辆制动停止,制动系统停止工作后制动力逐渐消散。
从后车感知到紧急状况到车辆完全制动停车这段时间,后车行驶的距离为:
|
(10) |
省略末尾项,得到后车最小安全制动距离如下所示:

|
(11) |
式中,S1为车辆通信延迟反应阶段和制动器协调阶段车辆行驶的总位移;S2为减速度由0增至最大这一阶段车辆行驶的位移;S3为车辆以最大减速度行驶的位移;Sall为从后车感知到前导车行驶状态发生变化到车辆完全制动停车这段时间车辆行驶的总位移;Ssafe为跟随车的最小安全制动距离。
2 考虑加速度变化的安全距离模型 2.1 加速度变化数学模型为更好地说明车辆在跟驰过程中加速度的变化情况,建立加速度变化模型是研究其变化过程的重要部分。依据车辆制动过程中加速度变化情况,绘制如图 3所示的加速度随时间的变化关系。

|
| 图 3 加速度随时间变化 Fig. 3 Acceleration varying with time |
| |
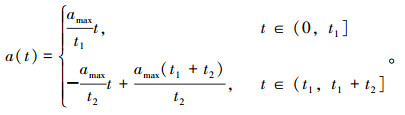
从图 3中可知,加速度随时间变化分为两个阶段。t1阶段加速度随时间呈线性递增趋势,当t=t1时刻,加速度达到最大值amax;t2阶段加速度呈线性递减变化,当t=t1+t2时刻,加速度递减至0。加速度随时间变化的公式如下:
|
(12) |
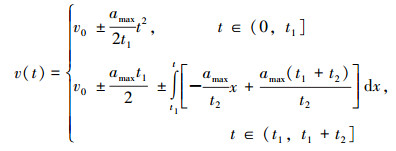
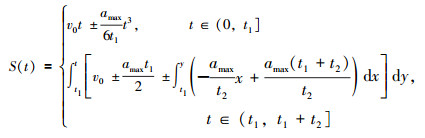
速度与位移的变化反映了车辆跟驰行为中跟随车运动状态的改变,加速度随时间的变化状态直接影响了跟随车辆在跟驰行为中速度与位移的变化。从图 3可知,加速度随时间的变化过程划分为两阶段,速度与位移各自随时间的变化过程同样需要划分为两阶段考虑。速度与位移随时间的关系式如下:
|
(13) |
|
(14) |
式中,v (t), S (t)分别为t时刻的速度和位移;v0为初始速度;amax为所能达到的最大加速度或减速度;t1, t2分别对应加速度或减速度呈递增和递减两个时间段。
2.3 前后车运动状态分析依据车辆制动过程的运动状态,可得到如图 4所示的车辆跟驰状态示意。

|
| 图 4 车辆跟驰状态 Fig. 4 Vehicle following status |
| |
(1) 前车匀速,后车速度大于前车速度且车间距较小
前后车之间保持较小的车间距,且后车速度大于前车,为达到后车以最小车间距跟随前车行驶的目的,后车需要减速至与前车速度相同,此时还要能够保证两车间距达到最小安全间距。该情况下后车仅经历一次减速过程,当后车检测到车间距达到临界车间距时,经过通信延迟t1后开始减速。减速阶段分为减速度递增和递减两阶段,所需时间分别为t21, t22。减速完成后,后车速度vk减至与前车一致,位移为Sd,Sd由式(14)计算得。当实测车间距达到临界车间距时,后车执行该运动过程。临界车间距由式(15)计算得。

|
(15) |
式中,Dc为临界车间距;vi为前车速度;vk为后车速度;t1为通信延迟阶段时间;t2为减速阶段的总时间;Sd为减速阶段后车行驶位移。
(2) 前车匀速,后车速度大于前车速度且车间距较大
该情况下跟随车辆运动状态描述如下:经过通信延迟阶段、加速阶段、匀速阶段和减速阶段,最终与前导车保持最小安全间距,并以共同速度匀速行驶。通信延迟阶段时间为t1;加速阶段分为加速度递增和递减两阶段,所需时间分别为t21,t22,行驶位移为Sa,Sa由式(14)计算得;匀速阶段时间为t3,匀速阶段跟随车辆行驶位移和所需时间分别由式(16)和式(17)计算得;减速阶段分为减速度递增和递减两阶段,所需时间分别为t41,t42,行驶位移为Sd,Sd由式(14)计算得。当实测车间距达到临界车间距,后车执行该运动过程。临界车间距由式(18)计算得:

|
(16) |

|
(17) |

|
(18) |
式中,Su为匀速阶段位移;Sa为加速阶段位移;Sd为减速阶段位移;vmax为最大速度;t3为匀速阶段时间;Dmeasured为初始实测车间距;vi为前车速度;vk为后车速度;d为最小安全间距;Dc为临界车间距;tuniform为匀速阶段时间的上限值。
(3) 前车匀速,后车速度小于前车速度
后车速度小于前车速度,两车间距会随行驶时间的增加而逐渐拉大。此种情况下跟随车辆运动状态描述如下:经过通信延迟阶段,开始进行第1次加速、匀速和减速运动。当实测车间距小于等于临界车间距时,跟随车辆保持与前导车相同的速度匀速行驶。匀速结束后,开始进入第2次加速、匀速和减速行驶。最终与前导车保持最小安全车间距,并以共同速度匀速行驶。通信延迟阶段时间为t1;加速阶段一时间为t2=t21+t22;匀速阶段一时间为t3;减速阶段一时间为t4=t41+t42;匀速阶段二时间为t5;加速阶段二时间为t6=t61+t62;匀速阶段三时间为t7;减速阶段二时间为t8=t81+t82。加速阶段一、匀速阶段一、减速阶段一、匀速阶段二、加速阶段二、匀速阶段三、减速阶段二的行驶位移分别为:Sa1,Su1,Sd1,Su2,Sa2,Su3,Sd2。加速阶段和减速阶段位移由式(14)计算得,匀速阶段位移由式(19)计算得,匀速阶段时间由式(20)和式(21)计算得。vmax1,vmax2分别为加速阶段一、二达到的最大速度。判定跟随车辆进入第二次加速、匀速和减速阶段的临界车间距由式(22)计算得:

|
(19) |

|
(20) |
|
(21) |

|
(22) |
式中,Su为匀速阶段的行驶位移;vu为匀速阶段的速度;tu为匀速阶段的时间。Dmeasured为初始实测车间距;t2,t4,t6,t8分别为加速阶段一、减速阶段一、加速阶段二和减速阶段二的总时长;vi,vk分别为前车速度和后车初速度;vmax1,vmax2为最大速度;Sa1,Sd1,Sa2,Sd2分别为加速阶段一、减速阶段一、加速度阶段二和减速阶段二的车辆行驶总位移;d为最小安全车间距。Dc为临界车间距。
3 跟驰车队形成以及跟随车辆行驶策略基于智能网联环境,车辆之间能够借助通信设备和传感器实现信息交互与环境感知。基于领航-跟随控制法[17-18],将前后相邻两辆车作为研究对象,前车为领航车,后车为跟随车,整个车辆编队可以看作是由若干个领航跟随结构体组成。待加入队列的车辆仅需考虑其与相邻前导车的速度和位置关系,在很大程度上降低了对车辆队列研究的难度。
如图 5所示为车辆队列形成示意图,当只有一辆跟随车时,前后两车作为一对领航跟随结构体,在车辆动力学模型的加持下,跟随车辆经过一段时间行驶后,与领航车保持最小安全车间距共同匀速行驶;当第2辆跟随车加入编队时,此时仅需考虑该车与其相邻前导车之间的关系变化,将二者作为一对新领航跟随结构体进行研究。以此类推,当第N辆跟随车加入编队时,则将其与相邻前导车作为第N对领航跟随结构体进行研究。待加入车辆从队列尾部位置加入,并且加入队列顺序为依次加入,即当第N对领航跟随结构体中两车达到共同速度和最小安全车间距时,第N+1辆跟随车才开始加入车队。

|
| 图 5 车辆队列形成 Fig. 5 Vehicle queues formation |
| |
关于车辆编队中待加入车辆的行驶状态如何进行改变,本研究提出以下行驶策略:目标车辆在加入当前队列的过程中,其余未加入队列的车辆跟随其相邻前导车做跟驰运动。在智能网联化场景下,车辆具备通信和感知外界的功能,未加入车队的车辆能够感知其前导车的运动状态信息,并实时获取相关速度和距离信息来调整自身运动状态,以达到运动状态随相邻前导车变化而变化。如图 6所示,当第1辆跟随车加入队列时,其余跟随车速度随相邻前导车的速度变化。当第1辆跟随车与领航车形成编队后,第2辆跟随车开始加入当前车队。以此类推,当第N辆车汇入编队时,第N+1辆跟随车开始加入车队。

|
(23) |

|
| 图 6 跟随车辆行驶策略 Fig. 6 Following vehicles' driving strategy |
| |
式中,vkn+1 (t)为第n+1辆跟随车在未汇入车队阶段的t时刻速度;vkn (t)为相邻前导车的t时刻速度。
4 乘坐舒适性和行程时间行车舒适性是指车辆在一定的行驶范围内,乘客不会因为车辆在行驶过程中产生的振动而感到不适或疲惫,其又称为乘坐舒适性[19-20]。传统乘坐舒适性评价方法主要研究车辆振动对乘坐人员产生的影响,常用评价方法有斯佩林舒适性评价法、国际舒适性评价法、Janeway舒适性评价法等。车辆在行驶过程中,道路线形等因素同样会对乘客产生不同程度的影响,横向力系数评价法、横向加速度评级法、竖向加速度评价法和加速度干扰评价法则是考虑道路线形因素的舒适度评价方法。
行程时间的长短反映了车辆能否在一定时间内跟随靠近前导车。在保证乘坐舒适性良好的前提下,车辆在跟随靠近前导车过程中所用的时间越短越好。
4.1 加速度干扰评价法跟随车辆在跟驰过程中行驶状态随车速变化而变化,车辆始终不会以恒定速度行驶,而是在一定范围内摆动。由于加速度干扰能够描述车速摆动,乘坐舒适性与车速摆动关系密切,故加速度干扰能够作为乘坐舒适性的定量评价指标[20]。加速度干扰由Herman于20世纪50年代提出,并将其定义为车辆加速度和平均加速度的标准差。表征加速度干扰和乘车舒适度之间关系的数学表达式如下:
|
(24) |
|
(25) |
式中,σ为加速度干扰;T为总观测时间;a (t)为t时刻的车辆加速度;a为平均加速度。加速度干扰值越小,乘坐舒适性越高,一般取值在0~1.5表示乘坐舒适性较好。
4.2 加速度干扰模型由图 1可知,车辆加减速过程分为两阶段。t1时间段内,车辆以加(减)速度逐渐递增的趋势做加(减)速运动;t2时间段内,车辆以加(减)速度逐渐递减的趋势做加(减)速运动。
(1) 变加(减)速阶段1,即t∈ (0, t1],
|
(26) |
|
(27) |
|
(28) |
(2) 变加(减)速阶段2,即t∈ (t1, t1+t2]
|
(29) |
|
(30) |

|
(31) |
最终得到加速度干扰与amax, t1, vmax相关的数学表达式:
|
(32) |
|
(33) |
式中,a1 (t)为t1时间段内时刻的加(减)速度;

后车速度大于前车和小于前车两种情况下的匀速过程时间由式(16)和式(18)计算得,车辆跟驰全阶段下的匀速过程时间与加减速过程有关,所以数学表达式中涉及到最大加速度、变加(减)速阶段时间和最大速度。由两式推导出的匀速过程时间计算函数表达式如下:

|
(34) |
式中,x, y, z分别为最大加(减)速度、变加(减)速阶段一的时间,以及最大速度。
5 优化求解和运行仿真乘坐舒适性是车辆在行驶过程中驾乘人员对乘坐感受的评价。本研究使用加速度干扰作为舒适性评价指标,对跟随车辆在不同加减速阶段的乘坐舒适性进行评价,以低评价值作为舒适性良好的标准。舒适性评价过程中涉及到车辆最大加(减)速度、最大车速以及加(减)速度递增阶段的时间,多个加减速阶段对应多个加速度干扰评价式,通过构建含约束的多目标多维非线性规划,求解出最小值对应的最大加(减)速度、最大车速和加(减)速度递增阶段的时间。
5.1 多目标优化求解将乘坐舒适性和行程时间作为评价跟驰模型的综合评价指标,并建立各自的数学表达式作为多目标优化求解的函数对象。其中最大加速度、加速过程时间和最大速度是函数优化求解的决策变量。最大加速度取值范围为(2, 3.5];加速过程时间取值范围为(0.1, 2];最大速度取值范围为(20, 23]。
(1) 目标函数:

|
(35) |

|
(36) |
(2) 约束函数:
|
(37) |
|
(38) |
(3) 多目标函数和约束条件:
|
(39) |
|
(40) |
式中,决策变量x, y, z分别对应最大加速度、加速过程时间和最大速度。式(35)为关于乘坐舒适性评价的目标函数,以加速度干扰模型数学表达式作为乘坐舒适性评价的函数,函数中包含了变速过程两个阶段的舒适性评价,即加速度递增和递减阶段或减速度递增和递减(分别对应了变加速过程或者变减速过程);式(36)为关于行程时间的目标函数,车辆全过程时间由变速阶段时间和匀速阶段时间构成,匀速阶段时间决定车辆全过程时间的长短,故行程时间目标函数是针对车辆匀速阶段构建的;式(37)和(38)为约束函数。
5.2 仿真场景搭建与运行仿真Simulation of Urban Mobility(SUMO)是一款开源、微观和多模态的交通仿真平台,其是由德国航空航天中心运输系统研究所的人员联合开发完成。本研究利用netedit构建一条单向单行车道,最大允许速度为25 m/s(90 km/h)。利用XML语言编写route文件,包括车辆类型(vType)、行驶路径(Route)、出发时间(depart)、起始速度(departSpeed)等属性。
跟驰模型的仿真验证过程分为两种情况:前车匀速,后车速度大于前车情况下,设置前导车速度为16 m/s(57.6 km/h),后车速度为18 m/s(64.8 km/h);前车匀速,后车速度小于前车情况下,设置前导车速度为18 m/s,后车速度为16 m/s。通过Python利用SUMO外部接口Traci对SUMO进行二次开发,将模型数学表达式实例化,把优化求解过程中求得的最佳决策变量代入模型中进行验证。如图 7所示为跟驰模型可行性验证仿真。

|
| 图 7 跟驰模型可行性验证仿真 Fig. 7 Feasibility verification simulation for car-following model |
| |
车辆队列形成的仿真试验中构建了5辆试验车,一辆领航车和4辆跟随车,车辆ID依次为“0”,“1”,“2”,“3”,“4”。仿真试验过程中按照一定的时间间隔依次将跟随车加入仿真场景中。在未加入编队阶段,每辆跟随车的速度随其相邻前导车速度变化,如图 8所示为车辆队列形成仿真。

|
| 图 8 车队模型仿真 Fig. 8 Platoon model simulation |
| |
5.3 优化算法求解结果
Geatpy作为一种高性能实用型进化算法工具箱,其能够提供众多已实现的进化算法函数,并且为使用者开发出一套高模块化、低耦合性的面向对象进化算法框架。通过定义问题类和调用进化算法函数的操作进行优化求解,该工具箱可用于优化求解单目标优化问题、多目标优化问题、复杂约束优化以及组合优化等。本研究中通过Geatpy算法工具箱中的智能优化算法,对所构建的目标函数进行优化求解,计算出最优函数解对应的最佳决策变量,以及次优函数解对应的决策变量。
表 1和表 2分别是前导车速度小于跟随车速度情况下,优化算法求得的最佳决策变量和最优函数值,按照乘坐舒适性和行程时间筛选出6条数据,其中1条最优解和5条次优解。表 2中Comfort-Accel为加速过程的舒适度评价值,Comfort-Decel为减速过程的舒适度评价值,Uniform-Time为匀速过程行驶时间。
| 变量集 | Accel | Decel | t21 | t41 | Vmax |
| 1 | 2.017 | 2.001 | 0.132 | 0.153 | 22.994 |
| 2 | 2.012 | 2.002 | 0.556 | 0.101 | 22.997 |
| 3 | 2.027 | 2.001 | 0.273 | 0.100 | 22.968 |
| 4 | 2.008 | 2.010 | 0.102 | 0.177 | 22.928 |
| 5 | 2.236 | 2.000 | 0.319 | 0.102 | 22.968 |
| 6 | 2.472 | 2.000 | 0.139 | 0.102 | 22.927 |
| 解集 | Comfort-Accel | Comfort-Decel | Uniform-Time |
| 1 | 1.200 | 1.496 | 3.280 |
| 2 | 1.321 | 1.175 | 4.128 |
| 3 | 1.247 | 1.174 | 4.160 |
| 4 | 1.187 | 1.195 | 4.169 |
| 5 | 1.401 | 1.174 | 4.518 |
| 6 | 1.485 | 1.174 | 4.896 |
表 3和表 4分别为前导车速度大于等于跟随车速度情况下,优化算法求得的最佳决策变量和最优函数值,按照乘坐舒适性和行程时间筛选出4条数据,其中1条最优解和3条次优解。表 4中Comfort-Accel1为变加速过程一的乘坐舒适性评价值,Comfort-Decel1为变减速过程一的乘坐舒适性评价值,Comfort-Accel2为变加速过程二的乘坐舒适性评价值,Comfort-Decel2为变减速过程二的乘坐舒适性评价值,Uniform-Time为某一匀速过程的时间(共有3个匀速阶段)。
| 变量集 | Accel1 | Decel1 | Accel2 | Decel2 | t21 | t41 | t61 | t81 | Vmax1 | Vmax2 |
| 1 | 2.212 | 2.042 | 2.049 | 2.042 | 0.221 | 0.120 | 0.215 | 0.570 | 22.991 | 22.969 |
| 2 | 2.054 | 2.077 | 2.011 | 2.009 | 1.196 | 0.711 | 0.137 | 0.224 | 22.949 | 22.025 |
| 3 | 2.004 | 2.003 | 2.260 | 2.092 | 0.101 | 0.202 | 0.327 | 0.544 | 22.391 | 21.397 |
| 4 | 2.010 | 2.004 | 2.048 | 2.079 | 0.125 | 0.102 | 0.586 | 0.566 | 21.494 | 21.594 |
| 解集 | Comfort-Accel1 | Comfort-Decel1 | Comfort-Accel2 | Comfort-Decel2 | Uniform-Time |
| 1 | 1.329 | 1.212 | 1.244 | 1.350 | 3.280 |
| 2 | 1.458 | 1.426 | 1.207 | 1.236 | 4.646 |
| 3 | 1.178 | 1.219 | 1.479 | 1.468 | 6.467 |
| 4 | 1.191 | 1.196 | 1.437 | 1.452 |
5.4 微观仿真结果分析
(1) 两辆车的仿真分析
图 9、图 10和图 11分别为速度随时间变化曲线、位移随时间变化曲线和车间距随时间变化曲线。VF为前导车速度;VB为跟随车在最优解下求得的速度;DF为前导车位移;DB为跟随车在最优解下求得的位移;Minimum Safety Spacing为最小安全车间距,Headway Best为最优解下求得的车间距,Critical Vehicle Spacing Best为临界车间距。

|
| 图 9 速度随时间变化 Fig. 9 Speed varying with time |
| |

|
| 图 10 位移随时间变化 Fig. 10 Displacement varying with time |
| |

|
| 图 11 车间距随时间变化 Fig. 11 Vehicle spacing varying with time |
| |
图 9(a)中,匀速过程时间最短为3.280 s,最长为4.896 s,整个跟驰过程所需的仿真时间均在20 s左右,即表明前导车速度小于跟随车速度的情况下,最优解和次优解所对应的最佳决策变量在仿真中所达到的效果相近。图 9(b)中,最优解中所能达到的最大速度分别为22.99 m/s和22.97 m/s,与最小值相差大约1.5 m/s,最大速度值越大越能够保证跟随车在较短的时间内跟驰靠近前导车。对比匀速过程时间,最优解下所需时间为9.84 s,次优解下所需时间最长为23.90 s,两者差距较大。同时也反映出最优解下跟随车跟驰靠近前导车所需的仿真时间最短。两种情形下,车辆跟随前车行驶符合速度一致原则。
图 10中,最优解下跟随车所行驶的位移最短,这表明跟随车跟驰靠近前导车所需的仿真时间最短。图 11中,最优解和次优解下,以及各次优解之间实测车间距随时间变化的曲线均各不相同。最优解下,两车车间距从初始实测值到最小安全值所需要的时间大约为28 s,次优解下所需要的时间分别为31,35,38 s。这表明最优解对应最佳决策变量能够保证跟随车辆以最短的时间跟驰靠近前导车,符合尽量靠近原则。跟驰过程未发生碰撞,符合避免碰撞原则。
(2) 5辆车的仿真结果及与CACC仿真结果对比分析
CACC和车队跟驰模型仿真结果对比分析如图所示,图 12,13和14分别为速度随时间变化、位移随时间变化和车间距随时间变化的曲线。VF为车队头车速度,VB1,VB2,VB3,VB4分别为跟随车1,2,3,4的速度;DF为车队头车的位移,DB1,DB2,DB3,DB4分别为跟随车辆1,2,3,4的位移;HB1,HB2,HB3,HB4分别为随车辆1,2,3,4与其相邻前导车的车间距。

|
| 图 12 速度随时间变化 Fig. 12 Speed varying with time |
| |

|
| 图 13 位移随时间变化 Fig. 13 Displacement varying with time |
| |

|
| 图 14 车间距随时间变化 Fig. 14 Vehicle spacing varying with time |
| |
如图 12(a)所示,CACC车辆在形成车队的运动中,车辆速度在16~20 m/s左右摆动,且摆动频率较高,由于CACC车辆在运动中会检测与前导车之间的车间距。间距较大时,车辆会加速跟随前车;间距较小时,车辆会主动减速,以避免发生碰撞。故在CACC车辆形成车队的仿真试验中,车辆速度呈现频率较高的摆动态势。如图 12(b)所示为本研究所提车队跟驰模型,车辆在形成车队的跟驰运动中,运动状态随其相邻前导车速度变化,按照本研究所提跟驰策略规律变化,避免出现车辆速度大幅度摆动现象的发生。如图 13所示,CACC车辆与依据本研究所提车队跟驰模型行驶的车辆在形成车队的过程中,均能够保持队形匀速行驶。图 14(a)中,CACC车辆在形成车队的跟驰运动中,与其前导车保持一定的车间距,但车间距大小处于动态摆动中,摆动幅度为28~33 m,摆动现象的发生并不利于车队的稳定行驶,且相邻前后车间距过大,未达到最小安全跟驰距离,车辆并不能以车队形式共同匀速行驶。图 14(b)中,以本研究所提车队跟驰模型行驶的车辆,在形成车队的跟驰运动中,相邻前后车车间距能够保持最小安全跟驰距离,且未出现动态波动现象。车辆能够以车队形式稳定行驶,符合尽量靠近、速度一致原则。在整个仿真试验中,车辆队列均为发生车辆碰撞现象,故符合避免碰撞原则。
6 结论在理论上,以尽量靠近、速度一致和避免碰撞这3条交互规则为基础,基于最小安全距离模型构建了一种面向智能网联汽车的车队跟驰模型。以乘坐舒适性和行程时间作为综合评价指标,建立数学模型并进行多目标优化求解。在SUMO仿真软件中构建路段模型,在跟驰模型仿真试验中,跟随车辆做靠近前导车的跟驰运动中能够较好地符合智能网联车辆交互规则。
在保证良好乘坐舒适性前提下,以最短行程时间靠近前车,最终两车达到相同速度,并且车间距达到最小安全距离。在车辆队列形成的仿真试验中,各辆跟随车均能够按照所提策略做加入队列的跟驰运动,最终整个队列保持相同速度匀速行驶,车队中相邻两车间距达到最小安全距离。通过仿真试验验证了车队跟驰模型的可行性。在与CACC车辆形成车队的跟驰运动仿真试验对比中发现,CACC车辆会出现速度和车间距值的动态波动现象。在最终形成的车队中,相邻车辆的车间距较大,且未能达到最小安全跟驰距离。速度和车间距值的动态波动对车队稳定性的影响较大,不利于车队稳定行驶。相比之下,以本研究所提车队跟驰模型行驶的车辆,在形成车队的跟驰运动中,能够使得整个车队稳定行驶,并符合三原则。
对于本研究仅考虑跟随车辆依次从队列尾部加入编队,存在一定的局限性。未来在研究中会考虑多辆车从车队的不同位置加入队列,完善对跟驰车队形成机制的研究。
| [1] |
唐毅. 基于前后多车信息的跟驰模型及其车流平稳性控制研究[D]. 重庆: 重庆大学, 2014. TANG Yi. Study on the Car Following Model and its Smoothness Control Based on the Information of Preceding and Following Vehicles[D]. Chongqing: Chongqing University, 2014. |
| [2] |
曲昭伟, 潘昭天, 陈永恒, 等. 基于最优速度模型的改进安全距离跟驰模型[J]. 吉林大学学报(工学版), 2019, 49(4): 1092-1099. QU Zhao-wei, PAN Zhao-tian, CHEN Yong-heng, et al. Car-following Model with Improving Safety Distance Based on Optimal Velocity Model[J]. Journal of Jilin University(Enginerring and Technology Edition), 2019, 49(4): 1092-1099. |
| [3] |
翟聪, 巫威眺, 黄玲, 等. 基于时变安全距离的跟驰模型反馈控制[J]. 华南理工大学学报(自然科学版), 2017, 45(7): 126-134, 152. ZHAI Cong, WU Wei-tiao, HUANG Lin, et al. Feedback Control of Car Following Model on the Basis of Time-varying Safety Distance[J]. Journal of South China University of Technology (Natural Science Edition), 2017, 45(7): 126-134, 152. |
| [4] |
高云峰, 赵雪, 沈阳, 等. 基于NGSIM数据的高速公路客货混合车流改进跟驰模型[J]. 公路交通科技, 2023, 40(9): 187-196. GAO Yun-feng, ZHAO Xue, SHEN Yang, et al. An Improved Car-following Model for Mixed Passenger and Freight Traffic on Expressway Based on NGSIM Data[J]. Journal of Highway and Transportation Research and Development, 2023, 40(9): 187-196. DOI:10.3969/j.issn.1002-0268.2023.09.022 |
| [5] |
阴晓峰, 朱宇航, 赵小娟, 等. 基于5G V2X通信的车辆协同跟随控制策略研究[J]. 公路交通科技, 2022, 39(5): 149-156. YIN Xiao-feng, ZHU Yu-hang, ZHAO Xiao-juan, et al. Study on Cooperative Following Control Strategy for Vehicles Based on 5G V2X Communication[J]. Journal of Highway and Transportation Research and Development, 2022, 39(5): 149-156. DOI:10.3969/j.issn.1002-0268.2022.05.018 |
| [6] |
GUO X G, WANG J L, LIAO F, et al. Quantized Insensitive Consensus of Lipschitz Nonlinear Multi-agent Systems Using the Incidence Matrix[J].
Journal of the Franklin Institute, 2015, 352(11): 4845-4863.
DOI:10.1016/j.jfranklin.2015.07.015 |
| [7] |
陈珍萍, 李海峰, 付保川, 等. 基于一致性理论的车辆队列研究综述[J]. 苏州科技大学学报(自然科学版), 2021, 38(3): 1-11. CHEN Zhen-ping, LI Hai-feng, FU Bao-chuan, et al. Review of Consensus-theory-based Vehicle Platoon Research[J]. Journal of Suzhou University of Science and Technology (Natural Science Edition), 2021, 38(3): 1-11. |
| [8] |
张普, 薛惠锋, 高山. 基于分布式自适应的多智能体容错一致性控制[J]. 航空学报, 2020, 41(3): 279-291. ZHANG Pu, XUE Hui-feng, GAO Shan. Distributed Adaptive Fault-Tolerance Consensus Control for Multi-agent System[J]. Acta Aeronautica Et Astronautica Sinica, 2020, 41(3): 279-291. |
| [9] |
黄健飞, 马彦. 基于跟随领航者的车辆自适应编队控制[J]. 吉林大学学报(信息科学版), 2019, 37(3): 253-259. HUANG Jian-fei, MA Yan. Adaptive Formation Control for Vehicles Based on Leader-follower Strategy[J]. Journal of Jilin University(Information Science Edition), 2019, 37(3): 253-259. |
| [10] |
毕灶荣, 童东兵, 陈巧玉. 一类基于自适应反馈控制的车辆编队研究[J]. 电子科技, 2019, 32(6): 31-36. BI Zao-rong, TONG Dong-bing, CHEN Qiao-yu. Research on Vehicle Formation Based on Adaptive Control Algorithm[J]. Electronic Science and Technology, 2019, 32(6): 31-36. |
| [11] |
BRUNETE A, HERNANDO M, GAMBAO E, et al. A Behaviour-based Control Architecture for Heterogeneous Modular, Multi-configurable, Chained Micro-robots[J].
Robotics and Autonomous Systems, 2012, 60(12): 1607-1624.
|
| [12] |
RUAN G K, WANG Z Q, XIA Y Q. Formation Control and Obstacle Avoidance for Multi-vehicle Systems with Optimal Assignment[C]// Proceedings of the 34th Chinese Control Conference. Hangzhou: IEEE, 2015: 7297-7302.
|
| [13] |
王树凤, 张钧鑫, 张俊友. 基于人工势场和虚拟领航者的智能车辆编队控制[J]. 上海交通大学学报, 2020, 54(3): 305-311. WANG Shu-feng, ZHANG Jun-xin, ZHANG Jun-you. Intelligent Vehicle Formation Control Based on Artificial Potential Field and Virtual Leader[J]. Journal of Shanghai Jiao Tong University, 2020, 54(3): 305-311. |
| [14] |
韩嘉成, 王江锋, 罗冬宇, 等. 基于免疫机制的网联车队双层信息传播模型研究[J]. 公路交通科技, 2024, 41(5): 161-170. HAN Jia-cheng, WANG Jiang-feng, LUO Dong-yu, et al. Double-Layer Information Propagation Model of Connected Vehicle Platoon Based on Immune Mechanism[J]. Journal of Highway and Transportation Research and Development, 2024, 41(5): 161-170. DOI:10.3969/j.issn.1002-0268.2024.05.019 |
| [15] |
周思, 柳祖鹏, 陈玲娟, 等. 路段上集群智能网联汽车的车队形成机制[J]. 公路, 2021, 66(2): 210-215. ZHOU Si, LIU Zu-peng, CHEN Ling-juan, et al. Platoon Formation Mechanism of Collective Connected Autonomous Vehicles on Road[J]. Highway, 2021, 66(2): 210-215. |
| [16] |
旷彪. 汽车追尾防碰撞控制系统的研究与仿真[D]. 长沙: 长沙理工大学, 2011. KUANG Biao. Research and Simulation of Vehicle 's Rear-end Collision Control[D]. Changsha: Changsha University of Science and Technology, 2011. |
| [17] |
KUMARAWADU S, LEE T T. Neuroadaptive Combined Lateral and Longitudinal Control of Highway Vehicles Using RBF Networks[J].
IEEE Transactions on Intelligent Transportation Systems, 2006, 7(4): 500-512.
|
| [18] |
XIANG J, BRAUNL T. String Formations of Multiple Vehicles Via Pursuit Strategy[J].
IET Control Theory & Applications, 2010, 4(6): 1027-1038.
|
| [19] |
许伦辉, 宋聪聪. 基于加速度干扰的路面平整度评价与行车舒适性研究[J]. 科学技术与工程, 2017, 17(2): 116-119, 125. XU Lun-hui, SONG Cong-cong. A Study on Evaluation of Pavement Roughness and Riding Comfort Based on Acceleration Noise Model[J]. Science Technology and Engineering, 2017, 17(2): 116-119, 125. |
| [20] |
黄艳国, 许伦辉, 罗强, 等. 加速度变化对道路平面线形行车舒适性评价方法[J]. 广西师范大学学报(自然科学版), 2014, 32(2): 1-8. HUANG Yan-guo, XU Lun-hui, LUO Qiang, et al. An Evaluation Method of Riding Comfort of Road Alignment with Acceleration Change[J]. Journal of Guangxi Normal University(Natural Science Edition), 2014, 32(2): 1-8. |