 2024, Vol. 41
2024, Vol. 41扩展功能
文章信息
- 黄开启, 瞿桃欢, 黄明禹, 陈荣华.
- HUANG Kai-qi, QU Tao-huan, HUANG Ming-yu, CHEN Rong-hua
- 基于演化博弈的车辆换道研究
- Study on Vehicle Lane-changing Based on Evolutionary Game
- 公路交通科技, 2024, 41(8): 31-39
- Journal of Highway and Transportation Research and Denelopment, 2024, 41(8): 31-39
- 10.3969/j.issn.1002-0268.2024.08.004
-
文章历史
- 收稿日期: 2022-06-17




 ,
, 城市交通的车流量大,车辆换道行为频繁且容易发生车辆碰撞事故,直接影响通行效率道路安全[1]。针对车辆换道可能产生的问题,传统的方法是基于安全性进行动力学分析和防碰撞检测。Joseph等[2]提出了一种自动驾驶车辆控制的替代方法,在尝试跟踪轨迹时明确考虑了车辆稳定性和环境边界;驾驶员可以选择违反短期稳定性约束以避免碰撞。武历颖[3]通过对无人驾驶汽车在车道变换过程中的运行轨迹进行分析计算,得出无人驾驶汽车与周围车辆不发生任何形式碰撞的最小初始距离。传统方法建立车辆模型来保证车辆在换道时的安全问题,但是缺乏对周围车辆的考虑。随着科学技术的发展,机器学习在车辆路径问题方面的运用也越来越广泛[4]。Dang等[5]在进行换道决策的研究中,将预测车道变化问题表述为回归问题,使用LSTM神经网络来捕获历史信息和预测实际的变道时间,使得预测车辆换道意图更加精确。Kim[6]等利用人工神经网络增强车辆和路况信息,提高了驾驶员意图分类的精度。但汽车在行驶时,驾驶员会观察所处驾驶环境和其他车辆的驾驶情况来调整自身车辆的驾驶。基于此,研究者开始考虑车辆之间的交互[7-8]。
博弈论又称对策论,是处理各类带有冲突因素问题的数学分支,广泛应用于经济、政治、军事、生物等各个领域[9-13]。在交通领域,胡益恺等[14]提出一种基于主从博弈的智能车辆决策方法,通过考虑路权来构建匝道汇流的博弈模型。魏丽英等[15]利用演化博弈来构建行人与机动车的冲突博弈矩阵,对行人过道时与机动车产生冲突进行分析。Hu等[16]通过采用广泛形式的博弈论来考虑多辆车之间的交互,利用广义博弈论的纳什均衡,估计和预测等不确定因素来进行预测和计划。Yu等[17]提出一种基于博弈论的变道模型,通过使用转向信号和横向移动与周围驾驶员进行交互来模仿人类行为。使用此模型,控制器能够实时提取信息并从交互中进行学习。
在已有的换道文献中,针对的场景大部分为高速路,对于城市交通的文献还很匮乏。城市交通相比于高速公路来说,车辆的速度较慢,车流量较大,车辆之间的交互也更加频繁,车辆换道和驾驶意图改变的可能性更大。Zhou等[18]采用混合logit模型研究出城市交通频繁变道的概念和目的,即为追求速度优势或更令人满意的驾驶环境。Zeng等[19]根据城市交通结构,采用以驾驶行为为导向的框架,根据基本交通规则和驾驶员的日常行为,将轨迹划分为变道、转弯和掉头。
本研究根据城市交通车速慢,交互频繁的特点,提出用演化博弈来模拟城市道路中车辆换道可能的交通状况,对博弈双方各自可能的收益和损失进行考虑,对演化方向进行了详细的分析,并对博弈中的重要参数进行了灵敏度分析。
1 城市交通车辆换道分析在城市交通过程中,车辆在原车道无法达到自身驾驶目标或状态时,会选择向其他车道进行换道从而实现自身的驾驶目的。但城市交通往往比较拥堵,车辆之间的交汇十分频繁,车辆在进行换道时不仅要考虑自身的驾驶状态,还要考虑周边车辆的驾驶状态以及他们的驾驶动向,以此来判断车辆在具体的交通情况下能否进行换道。
A车在原道路行驶时,由于需要实现自身的驾驶目的,在前方车辆正常行驶,且无特殊情况发生时,便会进行换道。如图 1(a)所示,若A车换道的目标车道车辆较少,与A车的距离较远时,A车的换道可以顺利进行,且并不需要考虑B车下一时刻的驾驶行为;如图 1(b)所示,在交通高峰时,由于车流往往是密集的,A、B两车相距较近,B车的驾驶状态会被A车进行考虑。此时由于双方的信息差问题,会导致A、B车辆产生互不相让或者相互忍让等情况,这些情况都不是理想的交通情况。在交通较为拥堵的情况下,A车能够换道成功,或者B车能够及时行驶是较为理想的交通情况。

|
| 图 1 车辆换道时的交通情况 Fig. 1 Traffic conditions when vehicles lane-changing |
| |
2 演化博弈介绍及模型建立 2.1 演化博弈场景假设
演化博弈是博弈论中重要的一部分,与生物进化的原理相似:生物通过不断学习、改变自己的行为,从而有目的性地调整策略,以提升自己的生存能力。在演化博弈当中,演化双方都是有限理性,都想在博弈中达到自身利益的最大化,博弈通过多次尝试来达到最终的演化稳定,从而形成演化稳定策略(ESS)。
参加博弈的双方为有换道意图的A车和在原车道行驶的B车。博弈主体策略集合为:A车:{换道,不换道};B车:{占道,不占道}。A车换道概率为x,不换道概率为1-x;B车占道的概率为y,不占道的概率为1-y。
博弈双方在进行博弈后可能获得的收益或损失。在双方博弈后,车辆始终会完成交互,因此车辆会存在一个基础的通过收益,但是车辆在博弈时进行的驾驶决策会导致车辆收益的变化。具体的收益和损失如下:
通过收益:车辆完成博弈后通过道路获得的收益;
冲突损失:车辆因同时进行占道发生碰撞而造成的损失;
时间损失:车辆选择让对方车辆先行而付出的时间成本;
互让损失:车辆均选择让对方先行而造成的损失;
换道成本:车辆进行换道时所要付出的成本。
在此前提下如表 1所示,设A, B车通过收益分别为U, V;车辆发生冲突的冲突损失分别为R, S;车辆不选择占道而造成的时间损失分别为M, N;双方车辆都不占道产生的损失为互让损失,分别为P, Q;对于A车来说,若要进行换道,其换道成本为F。
2.2 模型建立
根据上面假设,可以得到车辆的期望收益以及复制者动态方程。
(1) 车辆选择各种策略对应的收益
A车选择占道的纯策略收益为:

|
(1) |
A车选择不占道的纯策略收益为:

|
(2) |
A车混合策略收益为:

|
(3) |
B车选择占道的纯策略收益为:
|
(4) |
B车选择不占道的纯策略收益为:

|
(5) |
B车混合策略收益为:

|
(6) |
(2) 车辆的复制者动态方程
A车占道的复制者动态方程:
|
(7) |
B车占道的复制者动态方程:
|
(8) |
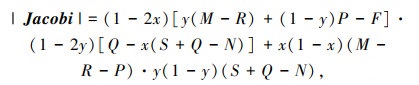
根据演化博弈的相关知识,演化博弈的均衡点是由演化双方的复制者动态方程分别求偏导构成雅可比矩阵所得,如式(9)所示,便可求得均衡点。
|
(9) |
博弈系统构成的雅可比矩阵为:

|
(10) |
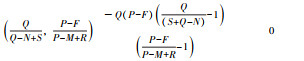
计算Jacobi矩阵的秩和迹:
|
(11) |

|
(12) |
利用Matlab解得均衡点及对应的秩和迹, 如表 2所示。
| 均衡点 | det(Jacobi) | tr(Jacobi) |
| (0,0) | Q(P-F) | P-F+Q |
| (1,0) | (F-P)(N-S) | F-P+N-S |
| (0,1) | Q(R-M) | M-R-Q |
| (1,1) | (M-R)(N-S) | R-M-N+S |
 |
||
由表 2可知,Jacobi矩阵的秩和迹与R-M、P-F、S-N的大小有关,由此可知会产生8种不同的情况,由于参数情况种类过多,本研究根据雅可比矩阵局部稳定分析法判断出各个稳定点的稳定情况,以稳定点的存在个数及位置进行分析。
3.2 各种情况的稳定点分析 3.2.1 稳定点不存在当A车的冲突损失小于时间损失,互让损失小于换道损失,B车的冲突损失大于时间损失,演化系统有4个均衡点(0,0),(1,0),(0,1),(1,1),均衡点的稳定性如表 3所示。
| 均衡点 | det(Jacobi)符号 | tr(Jacobi) 符号 | 结果 |
| (0,0) | - | 不定 | 鞍点 |
| (1,0) | - | 不定 | 鞍点 |
| (0,1) | - | 不定 | 鞍点 |
| (1,1) | - | 不定 | 鞍点 |
从表中可以看出这种情况并没有稳定点。取一组符合满足条件的各变量的值:点(x, y)的值分别取(0.3,0.5),(0.4,0.7),(0.4,0.9),(0.6,0.1),(0.7,0.3),(0.9,0.5),(0.6,0.5)用以做演化路径图,无特殊情况,下面各类演化图将都使用这些取值,需要特别取值时另外指出。

|
| 图 2 R < M,P < F,S>N演化示意 Fig. 2 Evolution of R < M, P < F, S>N |
| |
3.2.2 稳定点存在且有一个
(1,0)是稳定点:当A车的冲突损失小于时间损失,互让损失大于换道成本,B车的冲突损失大于时间损失,演化系统有4个均衡点(0,0),(1,0),(0,1),(1,1),均衡点的稳定性如表 4所示。
| 均衡点 | det(Jacobi)符号 | tr(Jacobi)符号 | 结果 |
| (0,0) | + | + | 不稳定点 |
| (1,0) | + | - | 稳定点 |
| (0,1) | - | 不定 | 鞍点 |
| (1,1) | - | 不定 | 鞍点 |
此时,系统只有一个稳定点,两个鞍点。取一组符合满足条件的各变量的值。
如图 3(a)所示,A,B两车的演化都收敛于(1,0)点,即在一定时间的演化过后,A车换道成功。在图中可以看出,无论双方初始概率多少,都将演化到A车换道成功,这是因为A车的冲突损失比时间损失要小,A车为了避免更大的时间损失,会采用强硬的措施进行换道而不会考虑B车的驾驶状态,在这种驾驶情况下,B车即使有很大的占道概率,因为A车的换道策略,为了避免冲突损失也会先让A车进行换道。

|
| 图 3 (1, 0)点演化 Fig. 3 Evolution of (1, 0) |
| |
对于演化系统的两个鞍点,鞍点(0,1)为A车不进行换道,B车进行占道;鞍点(1,1)为A、B两车均进行占道。在特殊的情况下才进行收敛。
(0,1)是稳定点:当车辆的冲突损失大于时间损失,A车的互让损失小于换道成本;A车的冲突损失大于时间损失,互让损失大于换道成本,B车的冲突损失小于时间损失;A车的冲突损失大于时间损失,互让损失小于换道成本,车辆B的冲突损失小于时间损失。这3类情况,演化系统有4个均衡点(0,0),(1,0),(0,1),(1,1),均衡点的稳定性如表 5所示。此时,系统只有1个稳定点,3个鞍点。鞍点(0,0)为A、B两车均不进行占道;鞍点(1,0)为A车进行换道,B车不会占道;鞍点(1,1)为A,B车均进行占道。取1组满足条件的各变量的值,博弈演化图如图 4所示。
| 均衡点 | R>M, P < F, S>N | R>M, P>F, S < N | R>M, P < F, S < N |
| (0,0) | 鞍点 | 鞍点 | 鞍点 |
| (1,0) | 鞍点 | 鞍点 | 鞍点 |
| (0,1) | 稳定点 | 稳定点 | 稳定点 |
| (1,1) | 鞍点 | 鞍点 | 鞍点 |

|
| 图 4 (0, 1)点演化 Fig. 4 Evolution of (0, 1) |
| |
(1,1)是稳定点:当车辆的冲突损失小于时间损失,A车的互让损失大于换道成本;当车辆的冲突损失小于时间损失,A车的互让损失小于换道损失。这两种情况演化系统有4个均衡点(0,0),(1,0),(0,1),(1,1),均衡点的稳定性如表 6所示。
| 均衡点 | R < M, P < F, S < N | R < M, P < F, S < N |
| (0,0) | 不稳定点 | 鞍点 |
| (1,0) | 鞍点 | 不稳定点 |
| (0,1) | 鞍点 | 鞍点 |
| (1,1) | 稳定点 | 稳定点 |
此时,系统只有一个稳定点,两个鞍点。鞍点(0,0)为A、B车均不进行占道;鞍点(0,1)为A车不换道,B车进行占道。取一组满足条件的各变量的值,博弈演化图如图 5所示。

|
| 图 5 (1, 1) 点演化 Fig. 5 Evolution of (1, 1) |
| |
可以看出系统以不同速率收敛到(1,1)点。因为车辆的时间损失都比较大,且A车的互让损失比换道成本大,为了使自身利益最大化,车辆便会选择占道而不是避让。这是城市交通中时常发生交通事故的原因之一。
3.2.3 稳定点存在且有多个当车辆的冲突损失小于时间损失,要进行换道的车辆互让成本小于换道成本时,演化有5个均衡点,其中,点(1,0),(0,1)是系统的稳定点,如表 7所示。
| 均衡点 | det(Jacobi)符号 | tr(Jacobi)符号 | 结果 |
| (0,0) | + | + | 不稳定点 |
| (1,0) | + | - | 稳定点 |
| (0,1) | + | - | 稳定点 |
| (1,0) | + | + | 不稳定点 |
 |
- | 0 | 鞍点 |
点 
从图 6中可以看出此时的演化能够很好地收敛于(0,1)和(1,0)两点,表示在进行演化博弈后,车辆的决策能够使得车辆之间不会发生冲突,且不会使双方车辆都产生时间损失,是较为理想的情况。在图 2中,以概率为(0.6,0.5)为例,A车有一定概率选择换道,同时B车也有一半的概率选择占道,此时A车主要损失为冲突损失和换道成本,B车的主要损失为冲突损失,所以双方都选择了退让,此后车辆的损失为互让损失,为了减少损失,B车开始进行占道,从而达到均衡。

|
| 图 6 R>M,P>F,S>N演化 Fig. 6 Evolution of R>M, P>F, S>N |
| |
这种情况是城市交通最常见的,即车辆的冲突损失大于时间损失,互让损失大于换道成本。此时演化系统有两个稳定点,一个鞍点,系统的演化方向受到初始值的影响。
4 灵敏度分析前文通过对各种情况的演化推理得出车辆在换道时可能发生的结果,其中部分情况中参数的变化不大,但演化结果却并不一样,说明参数之间的对比大小对演化结果有着很大的影响。为了更加直观地看出各参数对演化结果的影响,下面使用控制变量法对参数进行灵敏度分析,(x, y)的初始概率选择为(0.7,0.3)。
4.1 R-M的灵敏度分析取(P>F), (S>N), 以8组不同的R-M的值进行分析,如图 7所示。从图 7(a)中可以看出,R-M大于或小于0时,演化结果都收敛于(1,0)点,当R-M越小时,收敛的速度越快,即车辆的冲突损失会抑制车辆的换道行为,而车辆的时间损失将会促使车辆进行换道。

|
| 图 7 灵敏分析 Fig. 7 Sensitivity analysis |
| |
4.2 P-F的灵敏度分析
为了分析P-F对演化的影响,取R-M>0, S-N < 0, P-F的值从小于0一直递增到大于0,共8组数据。
从图 7(b)中可以看出,随着P-F不断增大,A车的收敛速度逐渐变缓,B车的收敛速率不变,即车辆的互让损失会促使车辆进行换道,车辆的换道车成本会抑制车辆进行换道。
4.3 S-N的灵敏度分析R-M>0, P-F < 0, S-N的值从小于0一直递增到大于0,共8组数据。
如图 7(c)所示,A车经过演化后决定选择不换道,B车则会选择占道。且S-N的数值越大,B车的占道速率越慢。即B车占道的速率与S-N的值成反比,表明冲突损失会抑制车辆占道,时间损失则会促使车辆占道。
4.4 Q的灵敏度分析为了分析Q值对演化结果的影响,分别取为S-N>0, S-N < 0, Q取8组值做灵敏度分析。
从图 8中可以看出,随着Q值的增加,A车的换道速率降低,而B车的占道行为速率上升,即B车的互让损失增加会抑制A车的换道速率,同时会使B车的占道速率上升。

|
| 图 8 Q值灵敏分析 Fig. 8 Sensitivity analysis on Q value |
| |
综上可知,车辆的互让损失会促使车辆在道路上的通过率,而车辆的冲突损失增加,会让车辆在考虑冲突时抑制车辆的通过;对于要进行换道的车辆来说,其换道成本过大时,也会抑制车辆的换道行为。
5 结论本研究针对城市拥堵交通情况下,面对车辆换道问题进行了分析,提出了车辆在进行换道时可能考虑的冲突损失、时间损失、互让损失以及车辆换道所产生的换道成本,据此构建了车辆之间的博弈矩阵。建立车辆之间冲突演化的动力学模型,分析不同情况下车辆换道情况,能够为研究城市交通情况提供一定的参考价值。
最后,本研究只是对换道时可能发生的车辆冲突进行一个初步的研究,后续将会根据更加具体的城市交通实例,考虑驾驶员心理等其他因素对换道情况的影响。例如驾驶员在换道时具有能换则换的驾驶心理,有些驾驶员则不允许其他驾驶员占道,使得建立的博弈模型能够更加准确地模拟出拥堵交通时换道的真实情况。
| [1] |
高德地图, 2018中国主要城市交通分析报告[EB/OL]. .https://baijiahao.baidu.com/s?id=1622808967853154807&wfr=spider&for=pc. (Amap, 2018 Traffic Analysis Report of Major Cities in China[EB/OL]. https://baijiahao.baidu.com/s?id=1622808967853154807&wfr=spider&for=pc.
|
| [2] |
FUNKE J, BROWN M, ERLIEN S M, et al. Prioritizing Collision Avoidance and Vehicle Stabilization for Autonomous Vehicles[C]//Proceedings of IEEE Intelligent Vehicles Symposium (IV). Seoul: IEEE, 2015: 1134-1139.
|
| [3] |
武历颖. 无人驾驶汽车环境信息提取及运动决策方法研究[D]. 西安: 长安大学, 2016. WU Li-ying. Research on Environmental Information Extraction and Motion Decision Method of Autonomous Vehicle [D]. Xi'an: Chang'an University, 2016. |
| [4] |
BAI R, CHEN X, CHEN Z L, et al. Analytics and Machine Learning in Vehicle Routing Research[J].
International Journal of Production Research, 2023, 61(1): 4-30.
DOI:10.1080/00207543.2021.2013566 |
| [5] |
DANG H Q, FVRNKRANZ J, BIEDERMANN A, et al. Time-to-lane-change Prediction with Deep Learning[C]//Proceedings of 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC). Yokohama: IEEE, 2017: 1-7.
|
| [6] |
KIM I H, BONG J H, PARK J, et al. Prediction of Driver's Intention of Lane Change by Augmenting Sensor Information Using Machine Learning Techniques[J].
Sensors, 2017, 17(6): 1350.
DOI:10.3390/s17061350 |
| [7] |
SONG R, LI B. Surrounding Vehicles' Lane Change Maneuver Prediction and Detection for Intelligent Vehicles: A Comprehensive Review[J].
IEEE Transactions on Intelligent Transportation Systems, 2021, 23(7): 6046-6062.
|
| [8] |
XIN L, WANG P, CHAN C Y, et al. Intention-aware Long Horizon Trajectory Prediction of Surrounding Vehicles Using Dual LSTM Networks[C]//Proceedings of 2018 21st International Conference on Intelligent Transportation Systems (ITSC). Maui: IEEE, 2018: 1441-1446.
|
| [9] |
ARCHETTI M, PIENTA K J. Cooperation among Cancer Cells: Applying Game Theory to Cancer[J].
Nature Reviews Cancer, 2019, 19(2): 110-117.
DOI:10.1038/s41568-018-0083-7 |
| [10] |
吕丹, 李明珠. 基于演化博弈视角的"乡贤"参与乡村治理及其稳定性分析[J]. 农业经济问题, 2020(4): 111-123. LÜ Dan, LI Ming-zhu. "Village Sages" Participating in Rural Governance from the Perspective of Evolutionary Game and Its Stability Analysis[J]. Issues in Agricultural Economy, 2020(4): 111-123. |
| [11] |
陈文强, 顾玉磊, 汪勇杰, 等. 基于博弈决策的道路通行费最优定价模型研究[J]. 公路交通科技, 2021, 38(5): 152-158. CHEN Wen-qiang, GU Yu-lei, WANG Yong-jie, et al. Study on Optimal Pricing Model of Road Toll Based on Game Decision-making[J]. Journal of Highway and Transportation Research and Denelopment, 2021, 38(5): 152-158. |
| [12] |
胡郁葱, 宫曼琳, 谢昳辰, 等. 网络预约出租汽车营运模式的四方博弈模型[J]. 公路交通科技, 2020, 37(2): 130-136. HU Yu-cong, GONG Man-lin, XIE Yi-chen, et al. A Four-side Game Model for Operational Mode of Online Car-hailing System[J]. Journal of Highway and Transportation Research and Denelopment, 2020, 37(2): 130-136. |
| [13] |
MAHIOUBI S, BAO Y. Game Theory-based Metaheuristics for Structural Design Optimization[J].
Computer-aided Civil and Infrastructure Engineering, 2021, 36(10): 1337-1353.
DOI:10.1111/mice.12661 |
| [14] |
胡益恺, 庄瀚洋, 王春香, 等. 基于主从博弈的智能车汇流场景决策方法[J]. 上海交通大学学报, 2021, 55(8): 1027-1034. HU Yi-kai, ZHUANG Han-yang, WANG Chun-xiang, et al. Decision Making Method of Intelligent Vehicle Confluence Scenario Based on Master-slave Game[J]. Journal of Shanghai Jiaotong University, 2021, 55(8): 1027-1034. |
| [15] |
魏丽英, 崔裕枫, 李东莹. 基于演化博弈论的行人与机动车冲突演化机理研究[J]. 物理学报, 2018, 67(19): 37-49. WEI Li-ying, CUI Yu-feng, LI Dong-ying. Research on The Evolutionary Mechanism of Pedestrian and Motor Vehicle Conflict Based on Evolutionary Game Theory[J]. Acta Physica Sinica, 2018, 67(19): 37-49. |
| [16] |
HU M, XIE G, GAO H, et al. Maneuver Prediction and Planning for Automated and Connected Vehicles Based on Interaction and Gaming Awareness Under Uncertainty[J].
IET Intelligent Transport Systems, 2019, 13(6): 933-941.
|
| [17] |
YU H, TSENG H E, LANGAI R. A Human-Like Game Theory-based Controller for Automatic Lane Changing[J].
Transportation Research Part C: Emerging Technologies, 2018, 88: 140-158.
|
| [18] |
ZHOU H, SUN Y, QIN X, et al. Modeling Discretionary Lane-Changing Behavior on Urban Streets Considering Drivers' Heterogeneity[J].
Transportation Letters, 2020, 12(3): 213-222.
|
| [19] |
ZENG D, YU Z, XIONG L, et al. Driving-behavior-oriented Trajectory Planning for Autonomous Vehicle Driving on Urban Structural Road[J].
Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2021, 235(4): 975-995.
|