 2024, Vol. 41
2024, Vol. 41扩展功能
文章信息
- 黄敏, 薛田莉, 周锦荣, 李烨焘, 张小兰.
- HUANG Min, XUE Tian-li, ZHOU Jin-rong, LI Ye-tao, ZHANG Xiao-lan
- 考虑交通信号和交通密度的城市路段个体行程时间建模
- Individual Travel Time Modelling of Urban Road Section Considering Traffic Signal and Density
- 公路交通科技, 2024, 41(7): 185-193
- Journal of Highway and Transportation Research and Denelopment, 2024, 41(7): 185-193
- 10.3969/j.issn.1002-0268.2024.07.021
-
文章历史
- 收稿日期: 2022-12-26





2. 广东省智能交通系统重点研究室, 广东 广州 510006;
3. 中山大学 深圳校区, 广东 深圳 518107;
4. 广东方纬科技有限公司, 广东 广州 510006;
5. 广东工贸职业技术学院, 广东 广州 510510
2. Guangdong Provincial Key Laboratory of Intelligent Transportation Systems, Guangzhou, Guangdong 510006, China;
3. Shenzhen Campus of Sun Yat-sen University, Shenzhen, Guangdong 518107, China;
4. Guangdong Fundway Technology Co., Ltd., Guangzhou, Guangdong 510006, China;
5. Guangdong Polytechnic of Industry and Commerce, Guangzhou, Guangdong 510510, China
随着数字化、信息化技术的快速发展,城市交通治理的智能化迸发出日益强大的活力[1]。作为数字孪生技术助力智慧城市建设的内容之一,城市交通大脑通过完备的数据采集来支撑智慧化的交通需求、能力和状态分析,实现交通路网精准认知,为精细化交通管理提供依据。通过时刻产生的车辆信息,掌握每辆车的每次出行,是城市交通大脑的基础[2]。
行程时间是反映个体车辆出行行为差异的重要指标。个体行程时间预测模型在城市交通大脑的动态交通诱导、交通信号实时控制、拥堵路段识别、道路安全预警等多个应用层面都具有重要的意义[3-4]。然而,当前关于行程时间的研究中,对城市信控路段行程时间的关注度却远低于高快速路,其中一个重要原因就是交通信号灯的周期性干扰,使得城市路段的行程时间具有一定的复杂性。近年来,具有个人身份、全天候、全规模等优点的车牌识别技术快速发展,支持城市交通大脑对个体车辆出行行为进行精细化解读与应用,推动交通系统理论由原来的数理统计模型向精细化的个体模型转变,为城市路段个体行程时间的深入研究提供了数据支持。
在关于城市道路行程时间的研究中,根据研究方法的不同,可以分为交通物理模型与数据驱动模型2类。其中,交通物理模型主要根据车辆在城市道路中的运动机理,构建行程时间与各种交通参数的函数关系式,从而预测车辆的行程时间,包括排队模型、交通波模型、元胞自动机模型等。Mak等[5]将行程时间分为自由流行程时间、信号交叉口等待时间、排队时间3部分,并基于车辆控制器数据估计交叉口处的排队位置及长度。Liu等[6]建立了一个基于排队长度估计值与到达流的状态空间模型用以预测行程时间。唐少虎等[7]设计了基于集散波的行程时间计算实验方法,提出了多模型自适应行程时间预测并给出了模型动态优化策略。Lu等[8]通过交通波理论分析并预测每辆车的交叉口延误,通过交叉口延误和路段自由流行程时间之和来预测路段行程时间。Wan等[9]使用路段节点单元-元胞自动机模型(LN-CTM)对交通进行建模,并基于蒙特卡罗模拟和聚类算法得到行程时间的概率分布情况。总结以上研究现状不难发现,当前的交通物理模型存在一定的局限性,行程时间与交通密度、交通信号配时方案、排队次数的关系仍有待进一步探索,且模型的精度仍有提升的空间。例如,在考虑排队的模型中,排队长度与交通信号灯的关系描述得不够完善,没有结合在绿灯放行、红灯阻断两种不同信号灯状态来分析排队长度的变化规律[10]。而将行程时间划分为上游行驶时间、下游信号等待时间等多个分段的模型则忽略了因排队车辆过多而导致的多次排队等拥堵情况[11]。
数据驱动模型则利用机器学习等方法,用历史数据来训练模型,以过去的数据为基础预测未来的行程时间,包括神经网络模型、卡尔曼滤波模型、时间序列模型、高斯混合模型、长短期时间记忆模型等。Kumar等[12]基于公共汽车GPS数据使用卡尔曼滤波模型建立基于速度的公共汽车行程时间预测模型。Lartey等[13]结合支持向量机(SVM)模型与ARIMA模型,充分捕捉交通数据中的交通模式,实现有效的行程时间预测。Chiabaut等[14]比较了高斯混合模型和K-means算法在高速公路行程时间预测上的差异。Gündüz等[15]建立了基于RNN-LSTM模型的区域行程时间预测方法。Shen等[16]提出了一种名为TTPNet的基于张量分解和图形嵌入的新型旅行时间预测神经网络。数据驱动模型虽在预测精度上有较好的效果,但忽略了行程时间与各种交通参数之间的内在关联,无法给出准确的物理表达。同时,由于对数据具有较大的依赖性,数据驱动模型往往难以快速推广到其他案例,需要获取当地的历史数据,重新学习、调试模型的各种参数[17]。
为探究城市路段中交通密度与交通信号对个体行程时间的影响规律,本研究将交通物理模型与数据驱动模型相结合,即根据物理关系深入挖掘了交通密度与交通信号对个体行程时间的影响规律,又利用数据驱动的方法描述行程时间函数中的随机误差项,精确掌握模型的误差分布,提出了一个由自由流行程时间、密度延误与随机误差项组成的行程时间关系函数,并以安徽省宣城市部分路段为例验证和分析该行程时间关系函数的可靠性。
1 行程时间关系函数的构建 1.1 相关定义本研究中的行程时间为车辆通过相邻2个信号交叉口之间路段的行程时间,即从车辆通过上游交叉口停止线到通过下游交叉口停止线所需的时间。相关定义如下。
(1) 进入密度:车辆进入路段时,路段上与该车辆具有相同出口转向的车辆密度。
(2) 进入信号时刻:车辆进入路段时刻与下游交叉口上一个与该车辆转向一致的绿灯相位开始时刻的时间差,取值范围为0至周期时长。该参数反映了车辆进入路段时下游交叉口的信号灯状态,决定了车辆到达路段出口时信号灯是否为绿灯状态。
(3) 离开信号时刻:车辆到达路段出口时刻与下游交叉口上一个与该车辆转向一致的绿灯相位时刻的时间差,取值范围为0至周期时长。
(4) 通行状态:车辆到达路段出口后,在后续第i个绿灯相位通过下游交叉口为i次通过(i=1, 2, 3, …, n)。
1.2 行程时间关系函数在城市2个相邻的交叉口之间路段的行程时间T可以分为3个部分:自由流行程时间Tf,密度延误Dc,随机误差项ε。

|
(1) |
式中,Tf为当交通密度较小以致车辆间互不影响、仅受交通信号灯及道路物理条件和限速等交通管理措施影响所能达到的最小行程时间;Dc为车辆在交叉口处等待排队消散的时间(见图 1);ε为个体驾驶行为习惯等其他次要因素对行程时间造成的影响。

|
| 图 1 自由流行程时间与密度延误 Fig. 1 Free-flow travel time and density delay |
| |
1.2.1 自由流行程时间
自由流状态下车辆的估计离开信号时刻te可通过下式计算得到:
|
(2) |
式中,L为路段长度;v0为路段限速;ts为进入信号时刻;C为周期时长;n为使得te∈[0, C)的一个参数,
在不同的估计离开信号时刻te下车辆的自由流行程时间可表示为:
|
(3) |
式中,te∈ [0, λ·C)为车辆到达路段出口时信号灯正处于绿灯状态,车辆可以直接通行,见图 2中车辆2;te∈ [λ·C, C)为车辆到达路段出口时信号灯不为绿灯,因此需停车等待C-te的时间至下一个绿灯相位,见图 2中车辆1。

|
| 图 2 不同估计离开信号时刻下的自由流行程时间 Fig. 2 Free-flow travel time with different values of te |
| |
1.2.2 密度延误
如图 3所示,密度延误Dc受车辆在下游交叉口处的排队次数影响显著,相邻通行状态下的车辆的密度延误可能存在约一个周期时长的差异。

|
| 图 3 各通行状态下的密度延误 Fig. 3 Density delay at different passing status |
| |
车辆在下游交叉口的排队次数,取决于车辆的进入密度以及密度阈值。其中,密度阈值用于判断车辆能否在当前信号周期通过交叉口,即当车辆的进入密度小于密度阈值时,车辆到达出口后的第1个绿灯相位能够排空前方所有车辆,即个体的通行状态S为1次通过;而当车辆的进入密度大于密度阈值时,车辆需要多次排队等待信号灯。下面给出路段密度阈值的计算方法。
(1) 密度阈值及通行状态的计算[18]。根据《城市道路工程设计规范》(CJJ 37—2012),交叉口直行车道的设计通行能力Ns为:
|
(4) |
式中,C为信号周期时长;λ为绿信比;t1为转换为绿灯后第1辆车通过停止线所需的时间,可采用2.3 s;t2为车辆通过停止线的平均间隔时间,可采用3 s;α为车道通行能力折减系数,建议采用0.9。
基于式(4)可得到1个信号周期内可通过交叉口的最大车辆数nmax为:
|
(5) |
结合路段长度L,得到判断车辆能否在当前信号周期通过交叉口的密度阈值ρc为:
|
(6) |
式中 
通过ρc和ρ,则可判断个体车辆在到达下游交叉口后能否在当前信号周期驶出交叉口,具体通行状态S为:
|
(7) |
式中,当S=i时,代表车辆的通行状态为i次通过,即车辆到达路段出口后,在等待过程中的第i个绿灯期间驶出交叉口;当ρc≤ρ<2ρc时,通行状态S=2,即个体的通行状态为2次通过,个体到达路段出口后,在等待过程中的第2个绿灯期间驶出交叉口,其余的通行状态计算以此类推。
(2) 密度延误的计算。密度延误的计算公式为:

|
(8) |
式中,前半部分表示车辆多次排队所需等待的多个周期时长,如图 4中①所示;后半部分表示在车辆驶出交叉口的绿灯相位中,车辆等待前方排队疏散所需的时间,如图 4中②所示,其中 

|
| 图 4 密度延误的计算 Fig. 4 Calculation on density delay |
| |
1.2.3 随机误差项
考虑到1.2.1节与1.2.2节中所构造的自由流行程时间函数与密度延误函数在不同个体间存在差异,因此通过构造随机误差项使得行程时间关系函数具有更好的适应性与推广性。通过计算个体的实际行程时间Tr与自由流行程时间Tf和密度延误Dc之差可得到随机误差项:
|
(9) |
当前多项研究已表明高斯混合模型对城市路段的行程时间分布具有较好的拟合效果,因此采用高斯混合模型对随机误差项的概率密度进行拟合,模型中的分布参数通过变量的概率值拟合得到。
2 实例分析 2.1 数据概况本研究基于宣城市交通大脑所提供的安徽省宣城市2019年8月的车牌识别数据、信号配时数据及地理信息数据进行实例分析。其中,车牌识别数据包括卡口对应的交叉口编号、车道编号、车辆通过卡口时间及车牌号码等信息。宣城市大部分卡口均布设在交叉口,交叉口卡口覆盖率已高于90%。信号配时数据包括信号灯所对应的交叉口编号、车道组编号、进口道编号、及绿灯相位开始与结束时间等信息。地理信息数据则包括卡口点位数据和宣城市中心城区路网地理数据。
本研究选取宣城市部分路段验证和分析其行程时间关系函数,各路段信息和相应的信号配时方案见表 1。
| 案例 | 路段 | 路段长度/m | 转向 | 绿灯时长/s | 周期时长/s |
| 1 | (1) | 380 | 左转 | 20 | 108 |
| 2 | (1) | 380 | 直行 | 28 | 108 |
| 3 | (2) | 404 | 直行 | 25 | 116 |
| 4 | (3) | 688 | 直行 | 35 | 125 |
| 5 | (4) | 582 | 左转 | 26 | 125 |
| 6 | (5) | 380 | 左转 | 18 | 105 |
2.2 结果及分析 2.2.1 个体车辆实际通行状态分布
个体车辆的实际通行状态Sr可根据车辆的实际行程时间Tr与信号周期时长C得到,其具体计算方式见式10,三者关系见图 5。
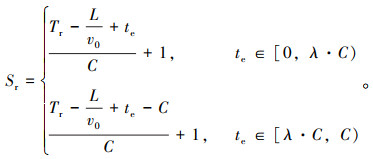
|
(10) |

|
| 图 5 个体实际通行状态示意图 Fig. 5 Schematic diagram of individual actual passing status |
| |
剔除噪声数据后,各案例的车辆行程时间-进入信号时刻分布情况见图 6,图中由下至上的3条散点带分别代表3种通行状态:1次通过、2次通过、3次通过。

|
| 图 6 各案例的通行状态分布 Fig. 6 Distribution of passing status for each case |
| |
统计各类别占比可知,绝大部分个体车辆的通行状态都集中在1次通过与2次通过,另有少部分为3次通过及以上。在转向为左转的案例1、案例5与案例6中,3次及以上通过的占比远高于其他3个直行案例,数据分布符合实际情况。同时,从图中可看出,由于信号灯的周期性干扰,行程时间与进入信号时刻呈现分段线性分布的特征。
2.2.2 个体车辆平均进入密度分布以案例1为例,剔除噪声数据后,该路段的个体车辆行程时间-进入信号时刻-平均进入密度的分布情况见图 7。其中,平均进入密度通过计算该坐标点上所有被覆盖数据的进入密度的平均值得到。

|
| 图 7 个体行程时间、进入信号时刻、平均进入密度分布(案例1) Fig. 7 Distribution of individual travel time, entry signal time, and average entry density for case 1 |
| |
从图 7中,可以归纳总结出2点信息:(1)在同一种通行状态、同样的进入信号时刻下,个体车辆的行程时间随进入密度的增大而增大;(2)从平均进入密度来看,1次通过、2次通过、3次及以上通过的平均进入密度依次增大,两种相邻的通行状态之间存在1个明显的密度阈值,即随着车辆进入密度增加至某个阈值,车辆的通行状态将会发生改变,无法在当前绿灯相位内通行,而需等待至下1个绿灯相位,即图中两两相邻通行状态的行程时间相差一个信号周期时长。
对其他案例的行程时间-进入信号时刻-平均进入密度分布图进行分析,可发现均满足以上两点,与本研究提出的密度延误计算方法完全吻合。
2.2.3 自由流行程时间实例分析自由流行程时间函数示意图见图 8。车辆1与车辆2分别为自由流行程时间的2种情形。其中,车辆1表示到达下游交叉口时信号灯不为绿灯,需停车等待至下1个绿灯相位的情形,根据1.2.1节可知此情形下车辆的自由流行程时间Tf=L/v0+C-te;车辆2则表示到达下游交叉口时信号灯为绿灯,车辆可以直接通行的情形,此情形下车辆的自由流行程时间 

|
| 图 8 自由流行程时间函数示意图 Fig. 8 Schematic diagram of free-flow travel time function |
| |
以案例1为例,在个体行程时间-进入信号时刻-平均进入密度分布图中所对应的自由流行程时间的2种情形见图 9。

|
| 图 9 自由流行程时间示意图(案例1) Fig. 9 Schematic diagram of free-flow travel time for case 1 |
| |
图 9中平直线②代表车辆到达下游交叉口时信号灯为绿灯的情形,对应图 8中车辆2,此时车辆可直接通过下游交叉口,该线段与横坐标轴间的距离则表示自由流行程时间,这是车辆所能达到的最小自由流行程时间;斜虚线①代表车辆到达下游交叉口时信号灯不为绿灯的情形,对应图 8中车辆1,此时车辆需停车等待至下一个绿灯相位。
2.2.4 密度延误实例分析各案例的密度阈值计算结果、不同通行状态的平均进入密度、根据密度阈值判断通行状态的准确率见表 2。从表中可看出,各案例的密度阈值均分布在一次通过数据的平均进入密度与二次通过数据的平均进入密度之间,且判断通行状态的准确率均高于90%。结果表明密度阈值的计算结果能较好地反映实际情况,本研究提出的密度阈值计算方法是行之有效的。
| 案例 | 密度阈值/(veh·lane-1·km-1) | 平均进入密度/ (veh·lane-1·km-1) | 通行状态判断准确率/% | |
| 1次通过数据 | 2次通过数据 | |||
| 1 | 21.03 | 11.03 | 25.81 | 93.45 |
| 2 | 26.71 | 13.10 | 28.81 | 90.18 |
| 3 | 23.35 | 9.70 | 25.14 | 91.13 |
| 4 | 18.42 | 9.35 | 20.03 | 91.96 |
| 5 | 23.65 | 13.50 | 26.78 | 91.49 |
| 6 | 20.30 | 8.09 | 21.07 | 93.67 |
2.2.5 随机误差项实例分析
使用二元高斯分布对各案例的随机误差项分布进行拟合,结果见图 10。

|
| 图 10 各案例的随机误差项分布 Fig. 10 Distribution of random error term for each case |
| |
从图 10中可知,随机误差项主要分布在- 20~20 s,且峰值均接近于0;另有极少数随机误差项分布在±100 s附近,主要是由于通行状态判断错误,致使预测行程时间与真实行程时间之差约为一个信号周期时长。但此类通行状态判断错误的数据占比极低,可见本研究提出的密度阈值计算方法仍具有较高的准确性。
2.3 精度验证上述模型在各案例下的表现情况如表 3所示,可以发现6个案例的MAPE,MAE,RMSE的均值分别为9.16%,8.76,21.31,误差较小。各验证结果均表明,该行程时间关系函数可以为城市道路个体车辆行程时间估计提供一种有效的方法。
| 案例 | MAPE/% | MAE | RMSE |
| 1 | 9.71 | 9.44 | 23.22 |
| 2 | 6.36 | 5.78 | 13.51 |
| 3 | 8.29 | 6.98 | 16.91 |
| 4 | 10.04 | 9.27 | 18.86 |
| 5 | 11.24 | 14.54 | 34.05 |
| 6 | 9.32 | 6.52 | 17.46 |
| 均值 | 9.16 | 8.76 | 21.31 |
2.4 模型对比
Lü等[11]基于经验速度-密度方程建立了基本车辆行程时间模型,将路段行程时间划分为路段行驶时间和信号等待时间:

|
(11) |
式中,Tr为路段行驶时间,基于由历史数据拟合的速度-密度方程,根据路段的密度确定车辆的行驶速度,再结合路段长度计算所得;Ts为信号等待时间,通过上下游交叉口的绿灯相位差计算得到。
对比分析本研究提出模型与Lü等[11]提出模型,结果见表 4,可看出本研究模型的误差较小,各项指标均显示出较大优势,是一种有效的城市路段个体行程时间预测方法。
| 案例 | 模型 | MAPE/% | MAE | RMSE |
| 1 | 本研究提出模型 | 9.71 | 9.44 | 23.22 |
| Lü等提出模型 | 15.38 | 19.68 | 37.12 | |
| 2 | 本研究提出模型 | 6.36 | 5.78 | 13.51 |
| Lü等提出模型 | 9.42 | 11.46 | 22.21 | |
| 3 | 本研究提出模型 | 8.29 | 6.98 | 16.91 |
| Lü等提出模型 | 12.84 | 14.01 | 24.41 | |
| 4 | 本研究提出模型 | 10.04 | 9.27 | 18.86 |
| Lü等提出模型 | 15.13 | 18.79 | 33.45 | |
| 5 | 本研究提出模型 | 11.24 | 14.54 | 34.05 |
| Lü等提出模型 | 16.27 | 20.71 | 40.63 | |
| 6 | 本研究提出模型 | 9.32 | 6.52 | 17.46 |
| Lü等提出模型 | 13.53 | 16.39 | 31.11 | |
| 均值 | 本研究提出模型 | 9.16 | 8.755 | 21.31 |
| Lü等提出模型 | 13.76 | 16.84 | 31.49 |
3 结论
针对城市信控路段行程时间预测难度大等问题,本研究基于车牌识别数据、信号机配时数据等多种融合数据,研究了城市路段个体行程时间与交通信号、路段密度的物理关系,深入探究其中的影响规律与作用机理,构建个体车辆行程时间关系函数。
通过考虑路段密度、信号灯状态、密度阈值等因素,本研究所提出的模型能够通过利用真实的车牌识别数据来估计车辆在交叉口处的密度延误。同时,本研究将交通物理模型与数据驱动模型相结合,将高斯混合模型用于拟合随机误差项分布,具有较好的拟合效果,大大提高了该模型的适应性与可推广性。
通过实例验证,该模型的预测误差较小,相较其他模型取得了更好的准确度,是一种从个体层面上预测车辆行程时间的切实可行的方法。将该模型集成到城市交通大脑中,能够使交通管理者全面掌握交通网络中的个体车辆运行情况,精准定位拥堵发生的地点和时间,从而针对瓶颈路段、时段进行精准管控,为城市精细化管理提供技术支持;可以为出行者提供个性化的行程时间预测值,避开拥堵路段,帮助司机选择更好的路线。同时,该模型还可应用于优化信号控制方案、引导救护车等特殊车辆等方面,提升路网运行效率。
| [1] |
崔优凯, 毛思捷, 洪盛, 等. 区县综合交通数字化水平评估方法[J]. 公路交通科技, 2023, 40(12): 189-196. CUI You-kai, MAO Si-jie, HONG Sheng, et al. Evaluation Method for Digitalization Level of Comprehensive Transportation in Districts[J]. Journal of Highway and Transportation Research and Development, 2023, 40(12): 189-196. DOI:10.3969/j.issn.1002-0268.2023.12.022 |
| [2] |
焦朋朋, 赵霞, 张勇, 等. 基于交通大数据的移动模式分析综述[J]. 中国公路学报, 2021, 34(12): 175-202. JIAO Peng-peng, ZHAO Xia, ZHANG Yong, et al. Review of Human Mobility Pattern Analysis Based on Big Transportation Data[J]. China Journal of Highway and Transport, 2021, 34(12): 175-202. DOI:10.3969/j.issn.1001-7372.2021.12.014 |
| [3] |
郝正博, 杨晓光, 王一喆, 等. 考虑时空协同优先的城市应急车辆路径优化方法[J]. 公路交通科技, 2024, 41(3): 169-178, 198. HAO Zheng-bo, YANG Xiao-guang, WANG Yi-zhe, et al. Dynamic Optimization on Urban Emergency Vehicle Route Considering Collaborative Spatio-temporal Prioritization[J]. Journal of Highway and Transportation Research and Development, 2024, 41(3): 169-178, 198. DOI:10.3969/j.issn.1002-0268.2024.03.020 |
| [4] |
袁锐, 陈宁, 仝瑶, 等. 混合交通流下的高速公路作业区最佳预警距离[J]. 公路交通科技, 2023, 40(7): 185-190, 206. YUAN Rui, CHEN Ning, TONG Yao, et al. Optimal Warning Distance for Expressway Construction Area under Mixed Traffic Flow[J]. Journal of Highway and Transportation Research and Development, 2023, 40(7): 185-190, 206. DOI:10.3969/j.issn.1002-0268.2023.07.024 |
| [5] |
MAK W K, VITI F, HOOGENDOORN S P, et al. Online Travel Time Estimation in Urban Areas Using the Occupancy of Long Loop Detectors[J].
IFAC Proceedings Volumes, 2009, 42(15): 383-390.
DOI:10.3182/20090902-3-US-2007.0099 |
| [6] |
LIU H, LINT H V, ZUTLEN H V, et al. Urban Travel Time Prediction Based on Queue Estimation[J].
IFAC Proceedings Volumes, 2006, 39(12): 484-490.
DOI:10.3182/20060829-3-NL-2908.00084 |
| [7] |
唐少虎, 刘小明, 陈兆盟, 等. 基于计算实验的城市道路行程时间预测与建模[J]. 自动化学报, 2015, 41(8): 1516-1527. TANG Shao-hu, LIU Xiao-ming, CHEN Zhao-meng, et al. Urban Road Travel Time Prediction and Modeling via Computational Experiments[J]. Acta Automatica Sinica, 2015, 41(8): 1516-1527. |
| [8] |
LU L, WANG J, WU Y, et al. A Real-time Prediction Model for Individual Vehicle Travel Time on an Undersaturated Signalized Arterial Roadway[J].
IEEE Intelligent Transportation Systems Magazine, 2022, 14(5): 72-87.
DOI:10.1109/MITS.2021.3068416 |
| [9] |
WAN N, GOMES G, VAHIDI A, et al. Prediction on Travel-time Distribution for Freeways Using Online Expectation Maximization Algorithm[C]//TRB. Transportation Research Board Annual Meeting. Washington, D.C. : TRB, 2014.
|
| [10] |
杨志宏, 杨兆升, 于德新, 等. 基于马尔可夫排队模型的行程时间预测方法[J]. 吉林大学学报(工学版), 2004, 34(4): 671-674. YANG Zhi-zhong, YANG Zhao-sheng, YU De-xin, et al. Travel Time Prediction Method Based on Malcov Queuing Model[J]. Journal of Jilin University (Engineering and Technology Edition), 2004, 34(4): 671-674. |
| [11] |
LÜ W, ZHOU X, FANG Z M, et al. Simulation Study of Vehicle Travel Time on Route with Signals Considering Comprehensive Influencing Factors[J].
Physica A: Statistical Mechanics and Its Applications, 2019, 530: 121389.
DOI:10.1016/j.physa.2019.121389 |
| [12] |
KUMAR B A, MOTHUKURI S, VANAJAKSHI L. Numerical Stability of Conservation Equation for Bus Travel Time Prediction Using Automatic Vehicle Location Data[J].
International Journal of Intelligent Transportation Systems Research, 2021, 19(1): 141-154.
DOI:10.1007/s13177-020-00230-5 |
| [13] |
LARTEY B, ZELEKE L, YAN X Y, et al. A Data-driven Approach for Travel Time Prediction and Analysis[C]//Proceedings of 2022 IEEE International Conference on Systems, Man, and Cybernetics (SMC). Prague: IEEE, 2022: 834-839.
|
| [14] |
CHIABAUT N, FAITOUT R. Traffic Congestion and Travel Time Prediction Based on Historical Congestion Maps and Identification of Consensual Days[J].
Transportation Research Part C: Emerging Technologies, 2021, 124: 102920.
DOI:10.1016/j.trc.2020.102920 |
| [15] |
GVNDVZ G, ACARMAN T. Vehicle Travel Time Estimation Using Sequence Prediction[J].
Promet-traffic & Transportation, 2020, 32(1): 1-12.
|
| [16] |
SHEN Y B, JIN C Q, HUA J X, et al. TTPNet: A Neural Network for Travel Time Prediction Based on Tensor Decomposition and Graph Embedding[J].
IEEE Transactions on Knowledge and Data Engineering, 2022, 34(9): 4514-4526.
DOI:10.1109/TKDE.2020.3038259 |
| [17] |
ABDI A, AMRIT C. A Review of Travel and Arrival-time Prediction Methods on Road Networks: Classification, Challenges and Opportunities[J].
PeerJ Computer Science, 2021, 7: e689.
DOI:10.7717/peerj-cs.689 |
| [18] |
杨晓光, 赵靖, 马万经, 等. 信号控制交叉口通行能力计算方法研究综述[J]. 中国公路学报, 2014, 27(5): 148-157. YANG Xiao-guang, ZHAO Jing, MA Wan-jing, et al. Review on Calculation Method for Signalized Intersection Capacity[J]. China Journal of Highway and Transport, 2014, 27(5): 148-157. |