 2024, Vol. 41
2024, Vol. 41扩展功能
文章信息
- 麦峻锋, 刘晓霏, 王杰, 袁旻忞.
- MAI Jun-feng, LIU Xiao-fei, WANG Jie, YUAN Min-min
- 高速公路清洁能源自洽充电引导调度策略研究
- Study on Guidance Scheduling Strategy for Clean Energy Self-consistent Charging on Expressway
- 公路交通科技, 2024, 41(5): 125-133
- Journal of Highway and Transportation Research and Denelopment, 2024, 41(5): 125-133
- 10.3969/j.issn.1002-0268.2024.05.015
-
文章历史
- 收稿日期: 2023-09-28





2. 交通运输部公路科学研究院, 北京 100088
2. Research Institute of Highway, Ministry of Transport, Beijing 100088, China
交通运输行业是能源消耗和碳排放大户,其中由于公路交通运输产生的碳排放超过70%,新清洁能源逐渐成为公路交通运输绿色低碳转型的关键。作为可再生能源载体之一的电动汽车受到了国内外的广泛关注等[1-4]。在清洁能源自洽率方面,贾利民等[5]对陆地运输交通中可再生能源系统的用电自洽率、能耗自洽率和可再生能源渗透率等参数使用了新的方式进行描述和统计。电动汽车在高速公路远距离出行时,部分汽车至少需要中途充电一次。但由于服务区缺乏有效引导调度策略,驾驶人对下一个服务区充电设施情况、待充电车辆排队情况等信息不明,常导致个别服务区充电车辆排队拥堵、等候时间过长、无序充电,出行效率低、体验不佳等问题。因此,为了促进电动汽车的公路远距离出行,推进交通与清洁能源的融合发展,需要对高速公路充电引导调度方法进行研究。
目前,国内外学者对建立合理的电动汽车充电选择方案有不同方面的研究。杨仁法等[6]使用蚁群算法解决带时间窗口的车辆安排引导问题;黄晶等[7]综合路网信息,考虑电动汽车的起点和终点构建了电动汽车有序充电引导方案;严弈遥等[8]提出一种结合道路交通权值思想、配电网评价体系的系统模型为待充电电动汽车划合适行驶路径的算法;闫天泽等[9]建立了基于交通网络、特定交通流信息和用户成本的电动汽车充电站优化规划模型,采用加权Voronoi图和模拟退火算法的方式对传统的粒子群优化算法进行改进后求解模型;张娜等[10]从驾驶人数量、车型、驾驶速度偏差等情况考虑并建立有序的车辆调度方案;杨莹等[11]提出了一种以负荷波动最小为目标,考虑电动汽车驾驶员在行驶过程中耗费成本最少和各个充电站之间负荷分配最优的两阶段引导调度模型。
以上研究对城镇电动汽车充电引导进行了研究,但未考虑在高速公路长距离出行情况下电动汽车利用清洁能源的充电引导调度。目前,电动车辆充电调度主要采用准确求解算法和启发式算法模型的理论和方法。准确的求解算法需要对模型中所有可行解进行遍历,计算量大,效率低。在启发式算法中,传统遗传算法可以通过快速随机搜索的机制求解最优解,但该类算法存在早熟和局部搜索能力差的问题。免疫优化算法利用自身的多样性和维持机制来保证种群的多样性,可以解决大多数优化问题,特别是多峰函数优化过程中的“早熟”问题,并通过多轮的迭代计算过程逐渐靠近最优解,最终求得全局最优解[12]。
本研究模拟实际高速公路路网结构并结合公路路网权重,以高速公路上待充电电动汽车驾驶人的里程和时间成本及服务区电动汽车清洁能源自洽率最优作为目标,提出一种高速公路电动汽车出行服务区充电的引导调度策略。
1 车-路-服务区参数 1.1 模型假设针对高速公路上待充电的电动汽车,目标充电服务区的选择需要从电动汽车驾驶人的角度进行考虑。电动汽车在高速公路行驶过程中有各种成本产生,例如里程成本、时间成本等。其中,里程成本包括电动汽车从起点行驶到服务区的距离及充电完成后从服务区行驶到终点的距离。时间成本包括从出发点行驶到服务区所花费的时间、在服务区充电所花费的时间及完成充电后行驶到终点所花费的时间。有如下假设:
(1) 本研究中待充电电动汽车都是快充需求,充电设施的充电功率为30 kW,每个服务区充电桩数为8个[13];
(2) 忽略电动汽车在服务区充电时对配电网造成的影响,将该影响简化为对服务区的充电负荷影响;
(3) 不考虑电车汽车自身的损耗,因为电动汽车在高速公路行驶过程中,其损耗较小且不易测量;
(4) 服务区中的可再生能源发电只用于服务区充电。
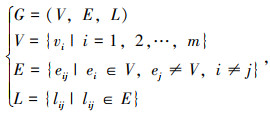
1.2 路网参数高速公路路网是电动汽车行驶的载体,利用图论的权值描述高速公路路网和服务区的关系(见图 1),其中的数字节点表示高速公路路网的服务区。

|
| 图 1 高速公路路网模型 Fig. 1 Expressway network model |
| |
|
(1) |
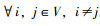
式中,V为服务区节点集合;E为高速公路有向弧段集合;L为路段长度权重集合;vi为节点编号;m为节点数量;lij为路段eij的长度;eij为节点i和j的连接关系,当eij=1时,节点i, j间存在连接关系; eij=0,i=j, i, j∈V;eij=∞,节点i, j间无连接关系。
因为高速公路的任何一条车道一般均为单向通行,所以从节点i到节点j有eij=1, 
|
根据电动汽车在高速公路上实际行驶的工况,高速公路下电动汽车的耗电模型ε[15]为:

|
(2) |
|
(3) |
式中, vet为路段e在t时段的平均通行速度; z=1为车辆到节点1的平均速度。
1.3 电动汽车参数电动汽车参数包括电动汽车数量、电池参数、充电条件判断和充电所需时间等,电动汽车的参数集合CE为:

|
(4) |
式中,O为电动汽车行程起点;D为电动汽车行程终点;to为电动汽车进入高速公路的时刻;Cp为电动汽车电池容量;Co为电动汽车初始电量;SL为电动汽车满足充电条件时的荷电状态;Nc为进入高速公路的电动汽车数量。
本研究的每一辆电动汽车统一分配高速公路的起点O与终点D,按照服从区间0~1的均匀分布随机分配进入高速公路的初始时间to。
1.3.1 电池参数电动汽车电池容量计算为:
|
(5) |
式中,Cp为满足伽马分布[16];α和β为伽马分布参数。
由于电动汽车在进入高速公路时,其电池电量不一定为充满状态,所以按照正态分布设定电动汽车的初始电量Co为:
|
(6) |
式中,Co为电动汽车初始电量服从N(0.85, 0.3)正态分布[17];σ和μ为正态分布参数。
1.3.2 电动汽车充电需求判断计算电动汽车在高速公路上当前时刻的电量情况,通过计算可得到车辆于t时刻在高速公路上剩余的电量Ct:
|
(7) |
式中,lto为电动汽车从行驶的起始时刻到行驶至t时刻时经过的高速公路长度。
当前时刻电动汽车电量Ct小于阈值CL时,其电量符合充电所需条件,并行驶到服务区充电补给。触发充电需求电量阈值为:
|
(8) |
式中,ω为电动汽车驾驶员的里程焦虑权重,服从区间0.15~0.30的均匀分布[18]。
1.3.3 电动汽车充电时长电动汽车在服务区充电时长tc为:
|
(9) |
式中,Ss为电动汽车抵达服务区时的SOC值,Ss=SL-l·ε;SF为充电后的SOC值服从N(0.85, 0.3)的正态分布[19];Pc为服务区充电功率;η为充电效率;l为电动汽车达到充电条件后行驶至服务区所经过的高速公路长度。
1.3.4 进入高速公路的电动汽车数量进入高速公路的电动汽车数量Nc为:
|
(10) |
式中,vk为进入高速公路的车流量速度;to为电动汽车进入高速公路的时刻。
2 最优引导调度目标电动汽车驾驶人,在高速公路出行,选择服务区进行充电补给时会考虑多种因素的影响。本研究综合了高速公路路网权值的方式,将电动汽车驾驶人行驶里程成本和里程耗时成本作为影响驾驶人的主要因素,并考虑提高电动汽车利用清洁能源充电的比例,提出了一种面向高速公路电动汽车出行的最优充电引导调度策略。
2.1 目标函数目标函数F主要包括3方面内容:电动汽车驾驶人在高速公路行驶过程中的里程成本F1、时间成本F2、服务区电动汽车清洁能源自洽率F3。目标函数表达为:

|
(11) |
式中a1,a2,a3为归一化权重,a1+a2+a3=1。
里程成本F1包括电动汽车从触发充电需求后行驶到服务区的距离及完成充电后行驶到终点的距离:

|
(12) |
式中,ynk为第n辆电动汽车选择在服务区k充电时ynk=1,否则ynk=0;lnk为第n辆电动汽车从触发充电需求后行驶服务区k的距离;lnD为第n辆电动汽车从服务区k到终点D的行驶距离。
与里程成本类似,时间成本也是用户主要考虑的因素之一。时间成本F2的表达式为:
|
(13) |
式中,xnk为第n辆电动汽车在服务区k的充电状态,xnk=0为正在充电,xnk=1为未充电;tkCn为第n辆电动汽车在服务区k充电需要的时间。
为了让引导调度后的电动汽车在充电过程中更多地利用公路系统的清洁能源。本研究在目标函数中增加了电动汽车清洁能源自洽率。该影响因素通过优化的充电引导调度策略有效地引导车辆前往清洁能源利用率低的服务区充电,从而为实现自洽供给的公路系统提供了参考信息。电动汽车利用清洁能源充电的比例用电动汽车清洁能源自洽率表示,即电动汽车在高速公路服务区充电时,利用服务区开发的清洁能源量Q1和总耗电量Q2的比例。电动汽车清洁能源自洽率为:
|
(14) |
式中当Q2=0时,F3记为0。
2.2 约束条件高速公路电动汽车出行存在2个约束条件。
(1) 高速公路上电动汽车的剩余电量应足以支撑电动汽车前往目标服务区充电:
|
(15) |
电动汽车前往服务区的里程不能超过直接前往目的地的里程,且完成充电后从服务区出发。前往目的地的总里程不大于其直接前往目的地的里程,并对一些不合适的服务区进行排除,以此来减少工作量。
(2) 每一辆电动汽车在发生充电需求时,只能前往一个服务区进行充电:
|
(16) |
对高速公路上待充电的电动汽车进行服务区引导调度的求解属于非线性、多变量的复杂优化问题。本研究采用免疫优化算法[20]对高速公路电动汽车最优充电服务区的引导调度模型进行求解。
3.1 充电引导调度模型充电引导调度模型技术路线如图 2所示。

|
| 图 2 充电引导调度模型技术路线 Fig. 2 Technical route of charging guidance scheduling model |
| |
结合进入高速公路的车辆数Nc、电动汽车参数CE、高速公路路网E和服务区开发的清洁能源量Q1作为输入,使用免疫优化算法求解出进入高速公路待充电车辆的服务区安排。服务区充电引导调度模型的系统函数A为:

|
(17) |
式中,Nc为进入高速公路的车辆数; CE为电动汽车参数; E为高速公路路网;Q1为服务区开发的清洁能源量。
3.2 免疫优化算法免疫优化算法采用种群搜索策略,强调种群中个体信息的交换,算法结构为“初始化生成抗体群—种群中个体评价计算—种群中抗体间信息互换—生成新抗体群”的循环过程。在免疫算法中,交叉、突变等固有的遗传操作被广泛应用在一般的多值优化群体搜索策略中。高速公路电动汽车最优充电服务区引导调度模型的系统流程如图 3所示。

|
| 图 3 引导调度模型的系统流程 Fig. 3 System flow of guidance scheduling model |
| |
免疫优化算法求解最优充电服务区引导调度模型步骤如下。
(1) 根据待充电电动汽车的参数信息CE、服务区开发的清洁能源量Q1和约束条件,计算每一辆待充电的电动汽车在触发充电阈值条件后可以选择充电的服务区范围(例如车辆1的选择范围是1~3服务区),并在相应的范围内随机选择一个服务区,作为该电动汽车的目标服务区。以此类推,通过该方式完成推荐充电服务区地点的初始化。
(2) 根据初始化中生成的充电调度方案,计算电动汽车驾驶人在行驶中产生的各项成本并综合求得服务区引导模型中该方案的综合成本,即目标函数F。
(3) 计算生成的充电调度方案的可行概率,将计算后的方案按可行概率大小进行降序排列,前N个方案作为当前迭代轮次中的待修改方案,同时重置记忆库并加入前m个方案。
(4) 判断两次迭代之间的差值是否小于设定的阈值,是则输出优化后的最佳充电服务区推荐方案,反之则继续进行优化。
(5) 根据步骤(3)的计算结果,淘汰并移除既未选为待修改方案也未入选记忆库的方案。
(6) 按照“选择”,“交叉”,“变异”的方式对推荐方案进行修改。
(7) 从记忆库中选取m个方案,结合步骤(6) 修改后的方案一并输入模型,然后从步骤(2)重新开始进行优化计算。
4 算例分析 4.1 车-路-服务区初始参数设置本研究的仿真试验使用MATLAB R2022a软件,仿真场景内投放500辆电动汽车。通过式(17)~(18)计算得到电动汽车最大初始电量为60.8 kW·h,最小初始电量为3.2 kW·h,平均初始电量为23.1 kW·h。初始电量分布情况如图 4所示。

|
| 图 4 电动汽车初始电量分布 Fig. 4 Initial power distribution of electric vehicles |
| |
每个服务区的清洁能源初始充电电量设定为520 kW。根据式(10)设定进入高速公路的车流量速度vk为600辆/h,且车辆进入高速公路的时间to按照均匀分布随机分配,电动汽车车速设置为90 km/h。
4.2 仿真场景建立高速公路路网结构如图 1所示,该高速公路全长500 km,电动汽车在行驶过程中,至少需要充电一次。共设置10个服务区,分布于2~11节点,从起点1号节点至第一个服务区2号节点及从最后一个服务区11号节点至终点12号节点的距离均为25 km,其余服务区间距为50 km。每个服务区有8个充电桩。
向该高速公路投入500辆电动汽车,根据式(10)计算, 设定vk为600辆/h, 且车辆进入高速公路的时间to按照均匀分布随机分配。其初始位置从起点开始,并行驶到终点。同时,实时计算监控在高速公路上行驶的电动汽车在当前时刻的电量情况。当电动汽车电量满足式(8)时,则满足充电条件。根据第2节所述的方法为电动汽车推荐合适的高速公路服务区进行充电补给。
4.3 仿真结果分析 4.3.1 电动汽车行驶总时间根据调度模型进行计算,引导前后电动汽车行驶总时间对比结果见表 1。对比与未考虑引导策略的便捷性的情况,本研究提出的高速公路电动汽车最优充电服务区引导调度策略能有效减少驾驶人花费的总时间。经过引导后,平均每辆车能减少60.7~81.5 min总时间,总体运行效率相对引导前提高了24.4%~32.8%,这证明该模型能够有效提高电动汽车在高速公路上的运行效率。当自洽率权重为0.2时,经过引导后,平均每辆电动汽车能减少的总时间最多,系统的运行效率最高。
| 电动汽车数量/辆 | 引导前总时间/h | 引导后总时间/h | 自洽率权重 |
| 500 | 2 070.4 | 1 390.9 | 0.2 |
| 1 417.9 | 0.3 | ||
| 1 450.5 | 0.4 | ||
| 1 468.9 | 0.6 | ||
| 1 528.8 | 0.7 | ||
| 1 564.3 | 0.8 |
根据式(7)~(8),对500辆随机分布的电动汽车进行模拟,其中约有18%的电动汽车充一次电后能行驶至目的地,其余车辆需要进行二次充电后才能行驶至目的地。
4.3.2 服务区充电负荷待充电电动汽车调度后的第1次和第2次充电时各个服务区的负荷对比如图 5所示。引导策略需要综合考虑单次与二次充电的需求,以确保驾驶员在高速公路上的行程总时间最短,系统的整体运行效率最高,并且优化服务区内电动汽车使用清洁能源的自洽率。

|
| 图 5 充电后各服务区的充电负荷 Fig. 5 Charging load of each service area after charging |
| |
由图 5(a)可知,与未采用引导策略的服务区充电负荷相比,本研究提出的引导策略显著降低了充电负荷,这里以自洽率权重设定为0.8的情况为例。引导策略会在第1次充电时候安排更多车辆在6~10号服务区之间进行充电,其目的是为了减少在第2次充电时在5~9号服务区的充电负荷压力。同时合理安排在1~5号服务区第1次充电的车辆,减少驾驶人行驶至目的地所需总时间,同时也提高了系统总体运行效率。
由图 5(b)可知,相对没有考虑引导策略,第2次充电引导5~9号服务区的平均充电负荷峰值降低50.3%,避免由于第2次充电导致后续多个服务区出现过高的充电负荷。从而使得整体的服务区充电负荷分配更合理,减轻了高速公路上电动汽车以无序方式充电导致对电网的冲击影响,达到了充电负荷均匀分配的目的。本研究为了验证服务区电动汽车清洁能源自洽率如何作为一个关键影响因素调整引导策略的有效性,通过分析服务区电动车辆充电数量、清洁能源自洽率及电动汽车的总行驶时间之间的关系,从而进行评估。
4.3.3 清洁能源自洽率由图 6可知,当清洁能源自洽率权重为0.8时,第1次充电有12%的待充电汽车会被引导至排队充电车辆数较少且清洁能源利用率较低的5~10号之间的服务区进行充电,减少了1~3号服务区排队充的车辆,在一定程度上增加了系统运行效率。第2次充电时,由于在第1次充电时对3~5号服务区排队充电的车辆进行了合理分配,使得更多待充电电动汽车能到6~10号服务区进行充电,减少聚集在3~5号服务区等待充电的情况。因此整体充电效率和清洁能源利用率均能比未经引导策略调度时增加。

|
| 图 6 各服务区充电的车辆数 Fig. 6 Number of vehicles in each service area for charging |
| |
相比没有考虑电动汽车的清洁能源自洽率的情况如图 7(a)所示,考虑电动汽车清洁能源自洽率的第1次充电调度后,1~4号和8~9号服务区的平均电动汽车清洁能源自洽率分别提高10.1%和210%。6~7号服务区平均电动汽车清洁能源自洽率从528%降低至385%。因此,经过考虑电动汽车清洁能源自洽率后的引导调度策略使得系统对清洁能源资源的分配利用更加合理均衡,减少部分服务区清洁能源闲置情况的出现。相比没有考虑电动汽车的清洁能源自洽率,如图 7(b)所示,2~7号和服务区的电动汽车平均清洁能源自洽率增加了3.5%,10号服务区电动汽车清洁能源自洽率增加了450%,9号服务区从360%降低至225%。这证明该模型能调整适合的服务区电动汽车清洁能源自洽率使得高速公路能源系统运行效率更高,资源分配更合理。

|
| 图 7 服务区电动汽车清洁能源自洽率 Fig. 7 Self-consistent rates of electric vehicle clean energy in service areas |
| |
由于设定场景中可供光伏板铺设的空间有限,使得每个服务区生成可供电动汽车充电的清洁能源平均只能满足18辆电动汽车的充电需求。从对待充电汽车的充电调度过程中能发现,1~5号服务区由于充电的车辆相对较多。如果没有对其进行合理的调度安排,服务区电动汽车清洁能源自洽率就会下降。并且8~10号服务区的充电资源会被闲置,同时也会影响高速公路系统整体的运行效率。又由于服务区电动汽车清洁能源自洽率会根据目标函数中的权重发生变化,因此可以根据实际需求对清洁能源自洽率进行调整。
如图 8所示,随着自洽率权重的提高,电动汽车的整体行驶时间以及总体自洽率均显示出一种上升的趋势,并且这种趋势与自洽率权重之间存在近似的线性关系。引导策略需要根据实际服务场景进行权重分配,权衡系统运行效率与服务区电动汽车清洁能源自洽率之间的取舍,从而实现最优的高速公路电动汽车充电引导调度。

|
| 图 8 行驶时间与自洽率关系 Fig. 8 Relation between driving time and self-consistency |
| |
考虑不同自洽率权重对电动汽车清洁能源总自洽率和车辆行驶总时间的影响,由于用户行驶里程成本F1和里程耗时成本F2因素容易影响车辆行驶总时间,因此,在试验中设定F1和F2为等比例的权重系数。自洽率权重为0.6时,在图 8的曲线图中呈现出波峰,而柱状图则显示波谷。在这一权重下,二者的对比显示出差异达到峰值,即每小时汽车行驶总时间获得的清洁能源自洽率最高。在该权重设置下,系统能够维持较高的电动汽车清洁能源自洽率,同时保证高速公路系统的运行效率。因此车流量vk为600辆/h时,自洽率权重为0.6是最优权重系数。
4.3.4 车流量不同电动车车流量会直接影响清洁能源利用率,以24 h为范围,在自洽率最优权重系数下,计算不同车流量与高速服务区电动汽车清洁能源自洽率的关系。经引导调度后不同车流量下的系统总清洁能源自洽率对比如图 9所示。

|
| 图 9 不同车流量的清洁能源自洽率 Fig. 9 Self-consistent rates of clean energy with different traffic flows |
| |
当车流量vk为3辆/h时,清洁能源自洽率达到第一个峰值77.6%后开始下降;当车流量vk为5辆/h时,所有服务区的清洁能源都有电动汽车在使用,清洁能源自洽率达到最大值78.3%。同时,随着车辆数的增加,高速公路能源系统总的清洁能源自洽率呈指数型下降趋势。当车流量vk为250辆/h时,即每日出行电动车数量超过6 000辆时,设计场景下的所有高速服务区的清洁能源都被消耗完。
5 结论本研究针对高速公路电动汽车服务区充电选择问题,构建服务区选择优化模型,以服务区的电动汽车清洁能源自洽率有效利用、用户行驶里程成本和里程耗时成本最小为目标,通过仿真模拟验证了该模型及算法的有效性和正确性。提出了高速公路电动汽车最优充电服务区引导调度方法,可用于长距离、高电池容量的高速公路出行,可以有效降低在高速上电动汽车到服务区进行充电补给和经服务区到最终目的地的总时间成本,减少服务区的充电负荷差距,降低电动汽车无序充电对电网负荷的影响。
高速公路电动汽车充电系统在现实操作中面临着多个动态和随机变化的因素,包括车辆的出入、充电调度、能源的储存变化及驾驶员的需求。如何根据实际动态变化的情况对高速公路上待充电汽车进行合理的动态调度,将有待进一步的研究。
| [1] |
CHAN C C. The State of the Art of Electric and Hybrid Vehicles[J].
Proceedings of the IEEE, 2002, 90(2): 247-275.
DOI:10.1109/5.989873 |
| [2] |
高赐威, 张亮. 电动汽车充电对电网影响的综述[J]. 电网技术, 2011, 35(2): 127-131. GAO Ci-wei, ZHANG Liang. A Survey of Influence of Electrics Vehicle Charging on Power Grid[J]. Power System Technology, 2011, 35(2): 127-131. |
| [3] |
董瑞咏, 毛保华, 魏润斌, 等. 碳达峰目标下的汽车电动化碳减排效果研究[J]. 公路交通科技, 2023, 40(2): 238-245. DONG Rui-yong, MAO Bao-hua, WEI Run-bin, et al. Study on Carbon Emission Reduction Effect of Automotive Electrification Under Goal of Carbon Peaking[J]. Journal of Highway and Transportation Research and Development, 2023, 40(2): 238-245. DOI:10.3969/j.issn.1002-0268.2023.02.029 |
| [4] |
YUAN M M, MAI J F, LIU X F, et al. Current Implementation and Development Countermeasures of Green Energy in China's Highway Transportation[J].
Sustainability, 2023, 15(4): 3024.
DOI:10.3390/su15043024 |
| [5] |
贾利民, 马静, 吉莉, 等. 中国陆路交通能源融合的形态、模式与解决方案[M]. 北京: 科学出版社, 2020. JIA Li-min, MA Jing, JI Li, et al. Science Patterns and Solutions of Ground Transportation and Energy Convergence in China[M]. Beijing: Science Press, 2020. |
| [6] |
杨仁法, 龚延成. 带时间窗车辆调度问题的蚁群算法[J]. 交通运输工程学报, 2009, 9(4): 71-74. YANG Ren-fa, GONG Yan-cheng. Ant Colony Algorithm of Vehicle Scheduling Problem with Time Windows[J]. Journal of Traffic and Transportation Engineering, 2009, 9(4): 71-74. |
| [7] |
黄晶, 杨健维, 王湘, 等. 下一目的地导向下的电动汽车充电引导策略[J]. 电网技术, 2017, 41: 2173-2181. HUANG Jing, YANG Jian-wei, WANG Xiang, et al. Destination Oriented Electric Vehicle Charging Guiding Strategy.[J]. Power System Technology, 2017, 41: 2173-2181. |
| [8] |
严弈遥, 罗禹贡, 朱陶, 等. 融合电网和交通网信息的电动车辆最优充电路径推荐策略[J]. 中国电机工程学报, 2015, 35(2): 310-318. YAN Yi-yao, LUO Yu-gong, ZHU Tao, et al. Optimal Charging Route Recommendation Method Based on Transportation and Distribution Information[J]. Proceedings of the CSEE, 2015, 35(2): 310-318. |
| [9] |
闫天泽, 邱晓燕, 刘延博, 等. 基于引入模拟退火思想的改进粒子群算法的电动汽车充电站最优规划[J]. 电测与仪表, 2017, 54(6): 11-16. YAN Tian-ze, QIU Xiao-yan, LIU Yan-bo, et al. Optimal Planning of Electric Vehicle Charging Station Based on PSOSA Algorithm.[J]. Electrical Measurement & Instrumentation, 2017, 54(6): 11-16. |
| [10] |
张娜, 杨琦, 胡飞虎, 等. 考虑个体驾驶速度偏差的车辆调度模型[J]. 交通运输工程学报, 2020(5): 187-197. ZHANG Na, YANG Qi, HU Fei-hu, et al. Vehicle Scheduling Model Considering Individual Driving Speed Deviation[J]. Journal of Traffic and Transportation Engineering, 2020(5): 187-197. |
| [11] |
杨莹, 李金亮, 吴尚阳. 路网-电网结合的电动汽车两阶段引导调度模型[J]. 黑龙江科技大学学报, 2021, 31(6): 794-801. YANG Ying, LI Jin-liang, WU Shang-yang. Two-stage Guidance and Dispatching Model for Electric Vehicles Based on Road Network And Grid[J]. Journal of Heilongjiang University of Science and Technology, 2021, 31(6): 794-801. |
| [12] |
史峰. MATLAB智能算法: 30个案例分析[M]. 北京: 北京航空航天大学出版社, 2011. SHI Feng. Intelligent Algorithm of MATLAB: 30 Case Studies[M]. Beijing: Beihang University Press, 2011. |
| [13] |
交通运输部, 能源局, 国家电网有限公司, 等. 加快推进公路沿线充电基础设施建设行动方案[EB/OL]. [2022-08-01]. http://www.gov.cn/zhengce/zhengceku/2022-08/25/content_5706750.htm. Ministry of Transport, National Energy Administration, State Grid Corporation of China, et al. Action Plan for Accelerating of Charging Infrastructure Construction Along Highways[EB/OL]. [2022-08-01]. http://www.gov.cn/zhengce/zhengceku/2022-08/25/content_5706750.htm. |
| [14] |
MENG K K, DONG F M, TAY T E. Introduction to Graph Theory: With Solutions to Selected Problems[M].
[S.l.]: World Scientific, 2024.
|
| [15] |
宋媛媛. 基于行驶工况的纯电动汽车能耗建模及续驶里程估算研究[D]. 北京: 北京交通大学, 2014. SONG Yuan-yuan. Energy Consumption Modeling and Cruising Range Estimation Based on Driving Cycle for Electric Vehicles[D]. Beijing: Beijing Jiaotong University, 2014. |
| [16] |
MU Y F, WU J Z, JENKINS N, et al. A Spatial-temporal Model for Grid Impact Analysis of Plug-in Electric Vehicles[J].
Applied Energy, 2014, 114: 456-465.
DOI:10.1016/j.apenergy.2013.10.006 |
| [17] |
XING Q, CHEN Z, ZHANG Z Q, et al. Urban Electric Vehicle Fast-charging Demand Forecasting Model Based on Data-driven Approach and Human Decision-making Behavior[J].
Energies, 2020, 13(6): 1-32.
|
| [18] |
张晨彧, 丁明, 张晶晶. 基于交通出行矩阵的私家车充电负荷时空分布预测[J]. 电工技术学报, 2017, 32(1): 78-87. ZHANG Chen-yu, DING Ming, ZHANG Jing-jing. A Temporal and Spatial Distribution Forecasting of Private Car Charging Load Based on Origin-destination Matrix.[J]. Transactions of China Electrotechnical Society, 2017, 32(1): 78-87. |
| [19] |
ARIAS M B, KIM M, BAE S. Prediction of Electric Vehicle Charging-power Demand in Realistic Urban Traffic Networks[J].
Applied Energy, 2017, 195: 738-753.
DOI:10.1016/j.apenergy.2017.02.021 |
| [20] |
计智伟, 胡珉, 尹建新. 特征选择算法综述[J]. 电子设计工程, 2011, 19(9): 46-51. JI Zhi-wei, HU Min, YIN Jian-xin. A Survey of Feature Selection Algorithm[J]. Electronic Design Engineering, 2011, 19(9): 46-51. |