 2024, Vol. 41
2024, Vol. 41扩展功能
文章信息
- 吴锋, 王会峰, 温立民, 王晓艳.
- WU Feng, WANG Hui-feng, WEN Li-min, WANG Xiao-yan
- 激光基准公路边坡稳定性网联监测系统
- Highway Slope Stability IoT Monitoring System Based on Laser Datum
- 公路交通科技, 2024, 41(2): 79-87
- Journal of Highway and Transportation Research and Denelopment, 2024, 41(2): 79-87
- 10.3969/j.issn.1002-0268.2024.02.008
-
文章历史
- 收稿日期: 2022-11-04




 ,
, 2. 长安大学 电子与控制工程学院, 陕西 西安 710064
2. School of Electronic and Control Engineering, Chang'an University, Xi'an, Shaanxi 710064, China
随着中国高速公路和交通基础设施建设发展,产生体量巨大的公路边坡。由于地质风化、雨水冲刷、行车扰动等原因,经常会发生边坡失稳,特别是边坡沉降,给行车安全和人们的生命财产安全带来严重威胁 [1-2]。因此,对于此类边坡失稳的灾害监测与预警具有重要的现实意义,也十分得紧迫。
然而,目前公路边坡稳定性监测依靠传统的人工居多,如采用测距仪、全站仪、水准仪、经纬仪等传统方式对重点边坡进行有针对性的监测,不仅程序繁杂而且效率低下[3-4]。随着中国公路建设规模的不断扩大,传统的监测方式难以满足要求。尽管有很多学者从事边坡智能监测系统的研究并取得了丰富成果,但这些监测方法监测精度较低,难以满足边坡监测的精度要求。如李永杨等[5]利用智能位移检测技术实现沉降监测;张成然[6]建立嵌入式监测系统与路基沉降预测模型;周军等[7]基于图像建模技术实现边坡可视化监测。近年来,有学者将大数据、人工智能等新兴技术应用于边坡稳定性监测,如视觉传感器、北斗和InSAR、全息检测技术和雷达检测技术[8-9],但因可靠性和高昂的价格而难以推广。Yadav等[10]采用激光技术实现山体滑坡的沉降监测,但受条件限制,该成果采用Lora点对点无线传输技术,传播距离有限,且只能实现点对点的通信,通信数据量有限;接下来,Yadav等[11]采用WSN技术实现数据传输,相比于Lora技术数据吞吐量有所提升,但该方法局限于局部物联网,难以实现数据云存储,数据量仍然难以达到实时性要求。近年来,有学者将神经网络应用于公路边坡沉降监测的研究,如武焱等[12]通过对卷积神经网络的改进,提出了信念神经网络的概念,并将该理论应用于公路边坡沉降预测,虽取得了一定的效果,但该算法的执行效率低下,占用资源较大,实时性较差。因此,研究如何实现低成本、高可靠性、高精度、联网联控的智能网联边坡监测系统具有重要的现实意义[13-14]。本研究基于激光基准结合倾角传感器,提出了一种自动化网联监测方案,该方案即可实时采集公路边坡变形量,映射边坡的稳定性,及时判断边坡的健康状态,也可应用于新建边坡的验收。相比传统的监测方案,采用激光网联监测具有以下优势:(1)监测精度高,为提高监测精度设计恒流源激光驱动电路,采用特殊安装结构方案;(2)执行效率高,为提高算法的执行效率以实现实时监测,采用FPGA的硬件软化方案,将数据计算量大的图像处理、光斑搜索等算法置于硬件实现;(3)实现联网联控,解决了远程监控问题;(4)具备非接触性、无人值守、全天候、低功耗的优点,对于边坡的稳定性三维变形监测具有重大意义。
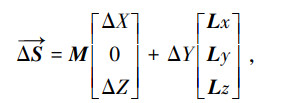
1 边坡稳定性三维变形监测原理 1.1 边坡三维变形监测原理监测原理如图 1(a)所示,系统主要由基准点处的激光源以及沉降点处的智能靶标组成。监测时首先将智能靶标监测仪固定在待监测点并调整为垂直状态,然后将激光器置于距工程之外一定距离的非变形区或相对稳定处,准直激光沿着固定的方向出射。智能靶标能获取当前激光点处传感器的变形,记录此次位置S1。运行一段时间后,系统再次以固定的时间为周期获得激光光斑中心在智能靶标的位置S2,将获得的2次位置距离信息进行向量差,就可以实时解算出此处的变形量ΔS[15-16]:
|
(1) |

|
| 图 1 沉降三维变形监测模型 Fig. 1 Settlement 3D deformation monitoring model |
| |
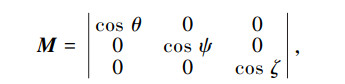
式中,ΔX和ΔZ为当前值与测量初值的差;M为角度传感器测量值得到的旋转变换矩阵:
|
(2) |
式中,θ, ψ, ζ分别是向量与x, y, z轴的夹角,如图 1(b)所示。
由于图像采集系统与光屏相对位置不变,故在向量中不能体现y方向的变化,因此需对监测系统加以改进,增加了激光测距功能,见图 1(a)。式(1)中ΔY为测距传感器的当前值与初值的差值,[Lx, Ly, Lz] 为激光基准的安装方向的单位向量。因此当已知ΔX,ΔZ,ΔY以及旋转矩阵 M,即可计算位移量。
从监测原理上对比,文献[10]和文献[11]同样都是采用激光技术,但文献[10]和文献[11]与本研究存在较大的差别。首先,文献[10-11]采用的是激光测距的方法,即在稳定区安置一个激光测距仪,在沉降点上设置光屏,通过距离测算直接测量沉降值。该方法一方面受到测距仪本身精度的影响,另一方面空间的变化也会给测量结果带来较大的误差。而本研究不仅为激光源设计了恒功率供电电路,而且设计了智能靶标,这些为获得高精度和长期稳定的沉降测量提供了保证。
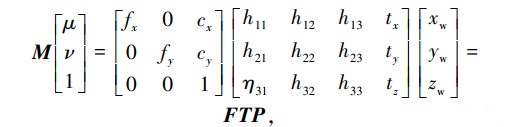
1.2 智能靶标标定原理如同1.1节所述,智能靶标安装于沉降坡面上,由图像采集仪和光屏组成,工作时激光入射到光屏上形成光斑,由于光源不动,而靶标随坡面沉降,导致光斑位置会发生变化,而变化的光屏信息被光学成像系统捕获并转换为图像光斑位置信息[17-18]。然而,采集的图像因安装或工艺的偏差会产生失真或畸变,需要对图像进行矫正,这个过程称为标定。系统标定需要将世界坐标系中点的坐标先转换为相机坐标系坐标,然后将相机坐标系坐标转换为图像坐标系坐标,最后将图像坐标系坐标转换为像素坐标系坐标,如图 2所示,转换如式(3)所示。设在世界坐标系下有一点M(xw, yw, zw),经过摄像头光心投影后在像素坐标系中映射点 M ′ (μ, ν, 1),则有对应关系[16-17]:
|
(3) |

|
| 图 2 坐标系变换 Fig. 2 Coordinate system transformation |
| |
式中,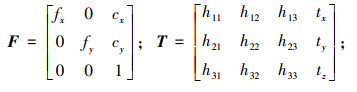
为测试标定效果,以张氏标定板为测试对象进行标定,确定参数矩阵T。张氏标定板(规格为20 mm×15 mm,格距为1 mm×1 mm)给定的世界坐标测试数据见表 1,经边坡稳定测试系统测量的像素坐标为u,v。将数据代入式(3)可计算出外参矩阵T,如式(4)所示:
|
(4) |
| 序号 | 世界坐标/mm | 像素坐标 | ||||
| xw | yw | zw | u | v | ||
| 1 | 100 | 120 | 45 | 876.12 | 1 543.54 | |
| 2 | 110 | 125 | 50 | 1 798.23 | 1 512.43 | |
| 3 | 120 | 130 | 55 | 745.65 | 1 523.67 | |
| 4 | 130 | 135 | 60 | 1 799.12 | 1 623.25 | |
| 5 | 140 | 140 | 65 | 645.65 | 1 678.76 | |
| 6 | 150 | 145 | 70 | 1 845.21 | 1 556.32 | |
| 7 | 160 | 150 | 75 | 598.45 | 1 698.23 | |
| 8 | 170 | 155 | 80 | 2 065.45 | 1 645.56 | |
| 9 | 180 | 160 | 85 | 498.34 | 1 856.67 | |
2 监测系统硬件设计
边坡稳定性监测系统硬件原理如图 3所示。系统分为2部分,一部分为激光发射单元,另一部分为智能靶标单元。2部分硬件单元都由光伏供电,以适应野外作业的需求。左半部为恒功率激光发射单元,因为靶标系统的光斑大小和稳定对监测精度有着决定性影响,因此为获得稳定的激光光斑,需要功率稳定且受控的激光光源,而现有的激光光源难以实现项目需求,因此提出三环反馈的激光稳定电路,以获得稳定的激光光源。光源的核心控制部件为STM32,外扩了激光测距仪和准直激光发射器。激光光源不仅承担激光发射任务,而且还是整个监测的发起端。整个监测工作的流程为:首先通过GPRS模块接收来自上位机的控制信号,激光单元按要求生成并发射恒功率激光,然后通过无线通信模块通知智能靶标工作(见图 3右半部分)。智能靶标系统的核心部件为FPGA,系统包括无线接收模块、图像采集与处理单元、激光测距仪、数据存储与处理单元。当智能靶标模块接收到来自激光发射端的指令后,表明光屏上已经产生稳定的激光光斑,然后核心部件FPGA控制CMOS摄像头采集光屏图像并存储于缓冲区SDRAM中,利用图像处理算法计算光斑位置,图像处理算法包括滤波、二值化、门限处理、腐蚀与连通等。当智能靶标系统解算出光斑位置后,将位置信息通过无线模块回传给激光发射单元,然后通过GPRS模块上传给上位机处理。

|
| 图 3 边坡稳定性监测系统框图 Fig. 3 Block diagram of slope stability monitoring system |
| |
2.1 基于FPGA的智能靶标硬件设计
智能靶标系统是监测系统的核心,而光屏光斑的定位精度对于监测系统起到关键作用,如何能准确定位光斑位置是必须解决的首要问题。为了兼顾定位精度与效率问题,避免激光源不稳带来的测量误差,采用FPGA设计了智能靶标。
智能靶标包括平面反射镜、CMOS摄像头、光屏、反射靶标、倾角传感器、采集PCB板和无线通信模块等。其中CMOS图像传感器采集光屏图像,通过FPGA算法解算光斑中心的三维位移量。倾角传感器测量靶标当前的倾角状态,用于补偿因角度倾斜引起光斑扩散导致的精度损失。无线模块用于将采集的位移信息上传到上位机。
由于边坡稳定监测系统易受到外界环境的影响,如光照、传播介质等,因此为提高精度需要从各个方面入手消除干扰,结构设计是消除干扰的一个重要环节。为了避免外界光线的干扰,为智能靶标设计了暗盒装置,将图像采集与光屏安装在暗盒内(图 4),在暗盒一端设置了竖向裂缝,激光从竖向裂缝穿过入射到光屏上,这样可以有效避免外界环境光对监测结果的影响。同时为避免暗盒内光线过暗,不利于图像采集,在暗盒内设置了补光系统,以提供恒定的光照,产生恒定光强的图像,保证每帧图像具有相对稳定的光强和对比度。

|
| 图 4 智能靶标系统结构 Fig. 4 Intelligent target system architecture |
| |
2.2 视频图像采集FPGA处理流程
基于FPGA的图像处理与光屏沉降信息解算复杂且重要,因此对这部分设计内容作重点阐述。图 5为视频流的FPGA算法处理流程。按照数据流向,解算算法包括位转换模块、视频采集模块、存储器对读写接口模块、DDR3存储器读写模块、阈值分割模块、二值化模块和显示驱动模块,如图 5所示。其中视频采集模块控制摄像头采集图像信息,摄像头为8位RGB888格式,即采集一个像素点需要3个字节[17-18],分别对应R,G,B三色,这对于存储器和带宽要求较高。为此需要将8位变换为16位RGB565格式,位转化模块bit translate bitd16完成RGB888到RGB565的格式转换。因为采集带宽较高,需要大容量高速率DDR3存储器进行存储,写存储器模块write ddr3 fifo和读存储器模块read ddr3 fifo实现存储器的读写功能,存储器读写接口模块Fifo axi是存储器读和写的统一接口模块。二值化(Binary Image) 模块首先完成RGB图像到灰度图像的转换,然后进行二值化处理,阈值分割模块(Threshold Part)实现图像的分割。最后通过遍历二值化图像,经金字塔算法搜索最佳的光斑位置。

|
| 图 5 FPGA处理流程 Fig. 5 Flow of FPGA processing |
| |
在上述图像处理模块设计中,存储器读写模块较为复杂且重要,关系到整个采集器的性能,因此对读写模块进行重点阐述。图 6为读写模块的状态机转换,其操作流程为:智能靶标上电初始化后为IDLE状态,当DDR完成初始化和校准后进入读写仲裁状态ARB,在该状态下根据是否有读写操作请求跳转到读写流程的各个状态。完成一次读写流程后,状态回到ARB状态进行下一次操作。

|
| 图 6 读写状态机测试 Fig. 6 Test for state machine |
| |
2.3 基于NIOS的硬件通信接口设计
经解算后的边坡沉降信息需要上传给上位机供用户使用,对于边坡监测,监控中心通常与边坡现场距离较远,采用有线方式施工较为困难。另外从节约成本角度考虑,在边坡监测远程通信传输中,通常选用无线传输方式,因此需要采用FPGA实现无线数据传输模块。然而对于FPGA而言,其特点是实现硬件的软化,即用硬件描述语言实现硬件电路的设计,提高了算法的执行效率,降低功耗。但众所周知,FPGA存在逻辑功能弱的不足,因此芯片厂商在FPGA上内嵌了NIOS软核,以增强FPGA在逻辑控制上的能力,允许设计者自定义接口与外设通信[19-21]。
因此在设计初期需要对靶标功能进行合理划分,确定哪些功能需要用FPGA硬件实现,哪些功能需要用嵌入式软核NIOS实现。经过仔细调研后,将图像采集、图像处理、数据存储、解算等运算量较大的部分划归为硬件实现,而对于通信接口等逻辑功能较强的部分由内嵌NIOS软核实现。然而在NIOS软核中没有合适的标准无线传输接口模块,因此需要根据需要自定义接口模块。图 7为无线通信自定义COM接口,其中包括读写控制总线、读写数据总线和状态总线。

|
| 图 7 自定义COM接口 Fig. 7 Custom COM interface |
| |
3 样机搭建及现场测试 3.1 工程概况
为了测试激光沉降监测系统的可靠性,以安康市汉滨区张滩至坝河公路改建边坡维护项目为目标,实施为期1 a的监测。该路段存在影响路基稳定的黄土崩体、孔隙发育不良现象,并且边坡的坡度较大,该区域的边坡结构松散,加上强降雨的作用,很容易造成边坡失稳[22-23]。项目边坡现场情况如图 8所示,图 8(a)为边坡东坡,图 8(b)为西坡。东坡坡体分为1~5级台阶,西坡坡体分为1~4级台阶,每级台阶之间的垂直距离为5 m,水平距离为2.5 m,每级台阶上的平台宽为3 m。在东、西坡各级台阶中,1级台阶最低,经测试最为稳定,其他各级台阶稳定性较差。

|
| 图 8 设备安装 Fig. 8 Equipment installation |
| |
3.2 设备安装及调试
根据项目需求,为有效监测边坡的沉降情况,给边坡运行和维护提供可靠的、全面的健康数据,需在整个边坡安装7套监测系统,即东坡4个,西坡3个,激光基准分别安装于东、西坡的1级台阶上,在2~5级台阶上分别安装接收智能靶标,如图 8中黑圈所示。
在保证系统的监测精度上,提高系统本身的测量精度是一方面,设备安装也是需要考虑的另一个重要环节。安装不当同样会给监测带来意外的误差,因此对于系统的安装需要仔细考量。其中激光基准源的安装是较为重要的一环,因为基准光源位置在监测过程中不能随边坡沉降而改变,否则将会给监测带来较大的误差。为保证激光基准源的稳定,需要在1级台阶处植入混凝土基桩,基桩通常要植入地下几米,有条件的地方要植入到岩石层,然后在基桩上固定激光基准源。
激光基准源安装好后需要调试光斑,为方便调试,在起初阶段先将接收端靶标的暗盒外壳去除,使激光直接入射到光屏上,待调整好激光源入射角度和光斑大小后,再将外壳安装上去。图 8(c)为安装调试初期的校准激光光斑。
3.3 监测系统的远程界面设计为更好地完成边坡沉降的远程监控,采用WEB技术为边坡稳定监测系统开发远程界面,如图 9所示。图 9(a)为用户登录界面,只有获得管理员授权,登录者方可顺利登录,登录后可以实现对远程MySQL数据库的操作。图 9(b)为东坡4台阶竖向、横向和顺坡方向的监测数据,由图可知东坡第4台阶处的横向位移较小,如图 9(b)竖向线所示。而竖向和顺坡向位移变化则较大,如顺坡向在21:44和22:05时刻,出现了阶梯状沉降。从历史数据图 9(c)中也可看出,顺坡向沉降同样表现出阶梯下降的趋势。

|
| 图 9 Web端数据管理界面 Fig. 9 Web-side data management interface |
| |
3.4 对比测试
为验证边坡稳定性监测仪的精度,本研究与当前对边坡沉降监测效果较好的文献[6]做比较,测试对象为安康市汉滨区张滩至坝河公路改建边坡维护项目。本研究测试从2021年1月至12月的数据,每月测一次,测试数据如表 2所示,其中真实值采用水准仪测得。比较结果如图 10所示。真实值为水准仪测量曲线,本研究以其作为参考标准。从测试结果可知,随着时间的推移和路面载荷量的增加,整体沉降有所增加。边坡建成初期,理论上沉降量较大,但此时载荷量较小,因此从整体时间跨度上看,沉降量较均匀。但文献[6]和本研究相比较,文献[6]的测量值与真实值的明显差异较大,波动也较大,这一点从图 10(b)误差曲线也可知。由图 10(b)可知,随着载荷量的增加,其误差呈现增长的趋势。而本研究误差波动不大,在12个月间最大误差不超过0.25 mm,误差百分比小于2.99%,因此本研究的测试效果要优于文献[6],可以用于边坡沉降量检测。
| 月份 | 途经车辆累计质量/(×103 t) | 沉降量/mm | 月份 | 途经车辆累计质量/(×103 t) | 沉降量/mm | |||||||||
| 真实值 | 文献[6] | 误差 | 本研究 | 误差 | 真实值 | 文献[6] | 误差 | 本研究 | 误差 | |||||
| 1 | 15 | 1.88 | 1.64 | 0.24 | 1.80 | 0.07 | 7 | 75 | 10.51 | 10.30 | 0.21 | 10.43 | 0.07 | |
| 2 | 25 | 2.91 | 2.72 | 0.19 | 2.94 | 0.04 | 8 | 85 | 11.60 | 11.09 | 0.51 | 11.72 | 0.11 | |
| 3 | 35 | 4.20 | 4.60 | 0.40 | 4.32 | 0.11 | 9 | 95 | 12.69 | 13.02 | 0.33 | 12.78 | 0.10 | |
| 4 | 45 | 6.57 | 6.83 | 0.26 | 6.74 | 0.18 | 10 | 105 | 13.73 | 14.14 | 0.59 | 13.81 | 0.07 | |
| 5 | 55 | 8.35 | 8.72 | 0.37 | 8.19 | 0.25 | 11 | 115 | 13.80 | 14.37 | 0.43 | 13.56 | 0.25 | |
| 6 | 65 | 9.66 | 9.95 | 0.29 | 9.53 | 0.14 | 12 | 125 | 16.40 | 16.99 | 0.59 | 16.61 | 0.21 | |

|
| 图 10 边坡沉降监测系统性能测试 Fig. 10 Performance test for slope settlement monitoring system |
| |
4 结论与建议
目前公路边坡健康监测中尚缺乏有效的高精度实时网联沉降监测方法,本研究采用FPGA实现基于金字塔的移动光斑搜索算法,实现边坡高精度沉降监测。监测系统可实现边坡内部位移、倾斜的自动化远程监测。经试验和现场安装调试,测得系统二维位移分辨率为0.5 mm,测量绝对误差小于0.25 mm,误差百分比小于2.99%,表明监测系统可用于边坡沉降的联网监测。
监测系统虽然能实现高精度边坡沉降远程监测,但仍存在适应性不足的缺点,即在天气状况良好的情况下工作比较平稳,但在恶劣气象条件下容易受到干扰,如雨、雪天气,因此下一步将对如何消除外界影响做进一步研究。
| [1] |
金磊, 曾亚武, 程涛, 等. 土石混合体边坡稳定性的三维颗粒离散元分析[J]. 哈尔滨工业大学学报, 2020, 52(2): 41-50. JIN Lei, ZENG Ya-wu, CHENG Tao, et al. Stability Analysis of Soil-rock Mixture Slope Based on 3-D DEM[J]. Journal of Harbin Institute of Technology, 2020, 52(2): 41-50. |
| [2] |
贾超, 张少鹏, 丁朋朋, 等. 地面沉降对地下水时空响应及其非工程控沉[J]. 东北大学学报(自然科学版), 2021, 42(7): 1032-1040. JIA Chao, ZHANG Shao-peng, DING Peng-peng, et al. Temporal-spatial Response of Land Subsidence to Groundwater and Its Non-engineering Subsidence Control[J]. Journal of Northeastern University (Natural Science), 2021, 42(7): 1032-1040. |
| [3] |
孙铁军, 李杰, 张豹, 等. 基于GWO-SVR模型的基坑边坡变形预测及敏感分析[J]. 公路, 2022, 67(4): 390-395. SUN Tie-jun, LI Jie, ZHANG Bao, et al. Deformation Prediction and Sensitivity Analysis on Foundation Pit Slope Based on GWO-SVR Model[J]. Highway, 2022, 67(4): 390-395. |
| [4] |
文奎, 王根, 宴长根. 地下水与边坡开挖对滑坡稳定性影响的分析[J]. 铁道建筑, 2014(2): 80-82, 118. WEN Kui, WANG Gen, YAN Chang-gen. Analysis on Influence of Groundwater and Slope Excavation on Landslide Stability[J]. Railway Engineering, 2014(2): 80-82, 118. |
| [5] |
李永杨, 刘飞. 智能位移检测技术在地铁施工现场安全监测上的应用[J]. 测绘地理信息, 2021, 46(增1): 119-121. LI Yong-yang, LIU Fei. Application of Intelligent Displacement Detection Technology in Safety Monitoring of Subway Construction Site[J]. Journal of Geomatics, 2021, 46(S1): 119-121. |
| [6] |
张成然. 嵌入式监测系统与路基沉降预测模型研究[D]. 太原: 太原理工大学, 2020. ZHANG Cheng-ran. Embedded Monitoring System and Modeling Analysis of Subgrade Settlement[D]. Taiyuan: Taiyuan University of Technology, 2020. |
| [7] |
周军, 李小亮, 马国辉. 白鹤滩水电站近坝边坡图像建模及可视化监测可行性研究[J]. 水电与新能源, 2021, 35(6): 13-17. ZHOU Jun, LI Xiao-liang, MA Guo-hui, et al. Feasibility Study on Image Modeling and Visual Monitoring of the Near-dam Slopes in Baihetan Hydropower Station[J]. Hydropower and New Energy, 2021, 35(6): 13-17. |
| [8] |
凌建明, 张玉, 满立, 等. 公路边坡智能化监测体系研究进展[J]. 中南大学学报(自然科学版), 2021, 52(7): 2118-2136. LING Jian-ming, ZHANG Yu, MAN Li, et al. Research Progress of Intelligent Monitoring System for Highway Slope[J]. Journal of Central South University (Science and Technology), 2021, 52(7): 2118-2136. |
| [9] |
旷小林, 张鸿, 张理平, 等. 基于光纤光栅传感技术的岩土体测斜仪研发及工程应用[J]. 公路, 2015, 60(11): 171-176. KUANG Xiao-lin, ZHANG Hong, ZHANG Li-ping, et al. Development and Application of Fibre Grating Inclinometer for Monitoring the Rock and Soil Slope Deformation[J]. Highway, 2015, 60(11): 171-176. |
| [10] |
YADAV D K, MISHRA P, JAYANTHU S, et al. Fog-LoT-based Slope Monitoring (FloTSM) System with Lora Commuicantion in Open-cast Mine[J].
IEEE Transactions on Instrumentation and Measurement, 2021, 70: 9514611.
|
| [11] |
YADAV D K, JAYANTHU S, DAS S, et al. Critical Review on Slope Monitoring Systems with Vision of Unifying WSN and loT[J].
IET Wireless Sensor Systems, 2019, 9(4): 167-180.
DOI:10.1049/iet-wss.2018.5197 |
| [12] |
武焱, 张映雪. 基于门控深度循环信念网络的边坡沉降预测[J]. 交通科学与工程, 2023, 39(1): 26-34. WU Yan, ZHANG Ying-xue. Slope Settlement Prediction Based on Gated Deep Recurrent Belief Network[J]. Journal of Transport Science and Engineering, 2023, 39(1): 26-34. |
| [13] |
王玉杰, 孙平, 李文新, 等. 西域砾岩边坡破坏机制及稳定分析方法[J]. 清华大学学报(自然科学版), 2021, 61(8): 863-872. WANG Yu-jie, SUN Ping, LI Wen-xin, et al. Failure Mechanism and Stability Analysis Method of the Xiyu Conglomerate Slope[J]. Journal of Tsinghua University (Science and Technology), 2021, 61(8): 863-872. |
| [14] |
黄益灵, 钱俊锋, 李相慧, 等. 反倾岩质边坡稳定性分析[J]. 科技通报, 2019, 35(3): 181-186. HUANG Yi-ling, QIAN Jun-feng, LI Xiang-hui, et al. Stability Analysis of Anti-toppling Rock Slope[J]. Bulletin of Science and Technology, 2019, 35(3): 181-186. |
| [15] |
张成然. 嵌入式监测系统与路基沉降预测模型研究[D]. 太原: 太原理工大学, 2020. ZHANG Cheng-ran. Embedded Monitoring System and Modeling Analysis of Subgrade Settlement[D]. Taiyuan: Taiyuan University of Technology, 2020. |
| [16] |
HUANG R Q, XIAO H B, JU N P, et al. Deformation Mechanism and Stability of a Rocky Slope[J].
Journal of China University of Geosciences, 2007, 18(1): 77-84.
DOI:10.1016/S1002-0705(07)60021-1 |
| [17] |
李梦姿, 蔡国庆, 李昊, 等. 考虑抗拉强度剪断的非饱和土无限边坡稳定性分析[J]. 岩土工程学报, 2020, 42(4): 705-713. LI Meng-zi, CAI Guo-qing, LI Hao, et al. Stability of Infinite Unsaturated Soil Slopes with Tensile Strength Cut-off[J]. Chinese Journal of Geotechnical Engineering, 2020, 42(4): 705-713. |
| [18] |
陈五一. 地震和降雨耦合作用下边坡稳定性分析[D]. 重庆: 重庆交通大学, 2018. CHEN Wu-yi. Stability of Slope under Coupled Action of Earthquake and Rainfall Analysis[D]. Chongqing: Chongqing Jiaotong University, 2018. |
| [19] |
施佳豪, 王庆, 冯悠扬. 基于三维标定板的相机标定方法[J]. 传感器与微系统, 2021, 40(6): 48-51. SHI Jia-hao, WANG Qing, FENG You-yang. Camera Calibration Method Based on 3D Calibration Plate[J]. Transducer and Microsystem Technologies, 2021, 40(6): 48-51. |
| [20] |
张志发. 荣乌高速公路黄土路基高边坡稳定性分析及防护措施研究[D]. 西安: 长安大学, 2012. ZHANG Zhi-fa. Stability Analysis and Measures on High Loess Subgrade Slopes at Rongcheng-Wuhai Expressway[D]. Xi 'an: Chang 'an University, 2012. |
| [21] |
林志坚, 黄萍, 郑明魁, 等. 基于FPGA的HEVC熵编码语法元素硬件加速设计[J]. 华南理工大学学报(自然科学版), 2023, 51(8): 110-117. LIN Zhi-jian, HUANG Ping, ZHENG Ming-kui, et al. Hardware Acceleration Design of HEVC Entropy Encoding Syntax Elements Based on FPGA[J]. Journal of South China University of Technology (Natural Science Edition), 2023, 51(8): 110-117. |
| [22] |
黄润秋. 岩石高边坡发育的动力过程及其稳定性控制[J]. 岩石力学与工程学报, 2008(8): 1525-1544. HUANG Run-qiu. Geodynamical Process and Stability Control of High Rock Slope Development[J]. Chinese Journal of Rock Mechanics and Engineering, 2008(8): 1525-1544. |
| [23] |
蒲鹤升, 谭泽富, 谭瑷军, 等. 边坡监测雷达快速处理的FPGA实现[J]. 雷达科学与技术, 2019, 17(2): 213-219. PU He-sheng, TAN Zhe-fu, TAN Ai-jun, et al. FPGA Realization of Rapid Preprocessing for Slope Monitoring Radar[J]. Radar Science and Technology, 2019, 17(2): 213-219. |