 2024, Vol. 41
2024, Vol. 41扩展功能
文章信息
- 杜永平, 鲁雯卓.
- DU Yong-ping, LU Wen-zhuo
- 旧路工程线形与平整度耦合共振研究
- Study on Coupling Resonance of Alignment and Flatness of Old Road
- 公路交通科技, 2024, 41(1): 25-34, 89
- Journal of Highway and Transportation Research and Denelopment, 2024, 41(1): 25-34, 89
- 10.3969/j.issn.1002-0268.2024.01.004
-
文章历史
- 收稿日期: 2023-07-19




 ,
, 经过几十年高速建设,国内建成了前所未有规模的公路网,截至2022年末全国四级及以上等级公路里程535.48万km,其中二级及以上等级公路里程74.36万km。这些基础设施是国民经济运行和发展重要的支承体系之一,随着经济结构转型升级,路网工作重点随着转向结构调整的改扩建和大中修工作。随着人民生活水平的提升,出行的舒适性越来越受到重视,客车行车舒适性研究由悬架系统等车辆平稳研究升级为智能座舱系统舒适性研究,作为车辆出行的重要支承设施,随着激光雷达等数字化测试工具的普及[1-2],如何在旧路条件下用最小的成本改造出高品质出行道路将是道路专业必须面对的课题,这对国内庞大的路网设施更新改造和养护具有重要的经济、社会价值。
新旧道路上行驶直观感觉差异是车辆的振动,通过对近30年收集的全国各地改造工程项目测量数据分析可知,纵断面呈现特征为:测量数据虽符合原设计中纵断面的总体趋势,远不能达到规范中设计速度要求的纵断面设计指标,在纵断面中存在折坡、纵向局部凹陷、纵向凹凸不平、竖曲线变形等各种缺陷,形成原因复杂[3],这些纵向变形使行车产生纵向位移,直接影响行车舒适性[4];鉴于现状条件,从改造设计角度将现状路面分为线形、线形变形、路面平整度结构(包括路面损坏)3个部分组成,对行车舒适性的影响差异较大。线形变形如路桥接坡、竖曲线变形等,均对行车舒适性产生较大影响[4-7],相关研究成果较多,修复措施完善[3]。
道路线形是指旧路现状道路线形基本维持原设计线形,以及能达到或接近于设计规范标准的现状线形。因为我国纵断面线形竖曲线半径是控制冲击和视距综合确定的[8],竖曲线半径大于等于按冲击标准确定的半径[8];三维设计理论研究[9]表明为保证车辆运行的平稳性和舒适性,线形设计时应至少保证二阶几何连续,即曲率连续,而现状纵断面线型只有二个基本线形单元,即直坡、竖曲线,从该研究成果角度分析,必然会产生汽车振动问题;因纵断面线形半径受控制原因,纵断面线形引起的车辆振动相对较小。
路面平整度结构由路面施工控制因素形成的初始平整度、路面损坏、路面使用局部变形等组成。道路平整度作为影响行车舒适性的重要因素受到广泛的重视,对平整度研究十分深入,形成了完整的施工控制和养护管理规范, 平整度对环境[10-11]、服务性能[12-13]等影响拓展研究同步展开,然而深入细化方面的研究还有待展开。周晓青等[14]在研究中细化了道路平整度不同波长、不同车速条件下,引起不同的车辆共振,产生了不同的国际平整度指数;然而国际平整度指数并不能完全代表行车舒适性[15],特别是现实条件下,各条道路不仅平整度波长组成差异很大,而且道路纵断面线形差异很大,这两个因素耦合共振的情况还需要进一步进行深化研究,为旧路改造工程提供相应的理论支撑。
本研究从驾乘人员角度探讨道路线形和平整度耦合共振,首先在力学分析的基础上,建立含纵断面线形参数和平整度因素的“人-车-路”动力学模型,在国内外研究成果基础上选择振动感知和舒适性指标作为耦合共振的评价标准;然后从耦合共振效应、平整度主要参数对耦合共振影响分析、车速对耦合共振影响分析、线形参数对耦合共振影响分析4个方面展开研究,总结耦合共振影响行车舒适性的主要制约因素。
1 “人-车-路”动力学分析模型构建和评价指标 1.1 模型假设和条件根据汽车在道路行驶的实际情况和研究工况条件,进行如下假设:
(1) 汽车均速在直线上行驶, 并不涉及汽车动力、加减速等问题。
(2) 路面平整度较小,汽车振动不大,轮胎与路面保持接触。
(3) 汽车仅考虑悬架、轮胎的自由度,座椅自由度结合在人体模型中,其余结构均按刚性连接考虑。
(4) 悬架、轮胎、人体模型刚度均为位移的线性函数,悬架、轮胎、人体模型阻尼为相对速度的线性函数。
1.2 模型建立车辆模型:采用七自由度小客车模型(图 1),车辆主要计算参数[16]:车身质量m=1 380 kg,俯仰转动惯量Ip=2 440 kg·m2,侧倾转动惯量Ir=380 kg·m2,前轮质量mw1=mw2=40.5 kg,后轮质量mw3=mw4=45.4 kg,前悬架刚度系数kb1=kb2=17 kN/m,前悬架阻尼系数cb1=cb2=1.5 kN·s/m,后悬架刚度系数kb3=kb4=22 kN/m,后悬架阻尼系数cb3=cb4=1.5 kN·s/m,轮胎刚度系数kw1=kw2=kw3=kw4=192 kN/m,轮胎阻尼系数cw1=cw2=cw3=cw4=0 kN·s/m,车身质心至前轮距离a=1.25 m,车身质心至后轮距离b=1.51 m。

|
| 图 1 “人-车”小客车模型 Fig. 1 Human-vehicle model |
| |
人体模型:采用生物力学研究成果,符合国人体格结构坐姿的三自由度模型[17-19]。人体模型参数[20]:m1=27.2 kg,m2=13.5 kg,m3=12.8 kg,k1=46 774 N/m,k2=10 866 N/m,k3=67 388 N/m,c1=710(N·s)/m,c2=1 487(N·s)/m,c3=1 487(N·s)/m。
路面模型:根据线形参数确定设计路面标高;从研究目标出发,将路面平整度按波长分解,各波长平整度函数采用正弦函数。路面模型为:

|
(1) |
式中,s为道路桩号;x为距中心线横向距离;fh(s, x)为路面内任一点设计高程函数;A,λ分别为路面波波幅值和波长;ν,t,δ0分别为车速、时间、路面波初始角。
受力分析:汽车以设计车速均速行驶在线形上,产生垂直路面的受力是“人-车-路”产生纵向振动的重要因素,系统主要受力为路面不平整产生的力、重力、离心力、路面支承力,路面不平整引起的力可作为“人-车-路”系统内力而产生,详见动力学方程组,重力、离心力、路面支承力与纵断面线形相关性较大,模型受力分析见图 2。

|
| 图 2 模型受力分析图 Fig. 2 Analysis diagram of model stress |
| |
(1) 重力垂直于支承面分量随线形变化
重力变化根据线形变化引起的角度变化确定,见式(2):

|
(2) |
式中,mj为车辆内j部分的质量;g为重力加速度。
(2) 离心力随线形变化
“人-车-路”系统在线形上运行,质量和速度是保持不变, 根据动量守恒定律系统内各质点受力变化为:

|
(3) |
整理式(3):
|
(4) |
因Δt、Δφi很小,采用泰勒公式展开式(4)变为:
|
(5) |
由此可见采用式(3)和式(5)计算是相同的离心力,但式(3)将线形参数与力学结合,更适合线形动态力学分析。
(3) 路面支承力随线形变化
同理可求得Qji为路面的支承反力。车辆在道路上行驶,4个轮胎是接触点,将“人-车”系统的质量在4个车轮的转化质量为mj,根据动量守恒定律,4个轮胎的受力为:

|
(6) |
式中,车辆转化质量为mj可采用车辆和驾乘人员重量合力、俯仰转动力矩、侧倾转动力矩均为0进行计算求得。
根据以上计算,4个车轮受力为:

|
(7) |
“人-车-路”系统其他质点受力为:
|
(8) |
式中,Qji为路面支承力随线形变化;Fij为离心力随线形变化;ΔGji为重力垂直于支承面分量随线形变化。
结合受力分析和“人-车-路”模型,根据达朗贝尔原理,对系统内单元的每个自由度建立其微分方程:

|
(9) |

|
(10) |

|
(11) |

|
(12) |

|
(13) |

|
(14) |

|
(15) |

|
(16) |

|
(17) |

|
(18) |
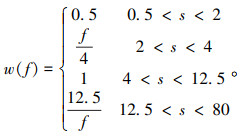
加权加速度均方根用于评价感知、振动舒适性的相关研究都得到验证[7, 20]。ISO确定人体影响频率范围0.5~80 Hz,且各个频率对人体影响相差较大,频域加权函数为:
|
(19) |
汽车振动感知标准各国有一些差异[20],选用要求较高体系完整的作为评价标准,见表 1。振动舒适性标准采用ISO标准,见表 2。
| 加权加速度均方根/(m·s-2) | 感知 |
| <0.01 | 无法感知 |
| 0.015 | 感知阈值 |
| 0.015~0.02 | 勉强感知 |
| 0.02~0.08 | 容易感知 |
| 0.08~0.315 | 强列感知 |
| >0.315 | 极端感知 |
| 加权加速度均方根/(m·s-2) | 人体的舒适程度 |
| <0.315 | 保持舒适 |
| 0.315~0.63 | 稍有不舒适 |
| 0.5~1.0 | 有些不舒适 |
| 0.8~1.6 | 不舒适 |
| 1.25~2.5 | 非常不舒适 |
| >2.0 | 特别不舒适 |
2 耦合共振效应
耦合共振影响参数较多,每个参数变化范围较大,先以120 km/h行驶条件为例进行平整度和线形引起车辆振动单独计算,再进行耦合共振计算,经对比分析展现耦合共振效应轮廓;然后延伸各主要参数变化与耦合共振效果互动关系研究,展现耦合共振的全面形态。
直坡平整度工况:纵断面处于2%直坡内,平整度波幅为3 mm,波长为0.5~50.0 m[15]。将这些参数代入路面模型中,采用Newmark-β法编制matlab程序求解振动微分方程,迭代计算误差按1%进行控制。图 3为波长50 m计算成果。

|
| 图 3 平整度波长50 m、波幅3 mm直坡路况下人体加速度、速度、位移(120 km/h) Fig. 3 Acceleration, velocity and displacement of human body under the condition of constant slope road with flatness wavelength of 50 m and amplitude of 3 mm (120 km/h) |
| |
竖曲线线形工况:将纵断面坡差为4%,半径为5 000 m的纵断面参数代入路面模型中,不考虑平整度,图 4为计算成果。在竖曲线起终点形成2.74 s行程的车辆振动区,该区域内加权加速度均方根为0.025 6 m/s2,根据表 1评价标准,达到容易感知水平。其余路段均为稳定区,加权加速度均方根分别为:2.871×10-5,2.04×10-4,2.68×10-4 m/s2,均小于0.01 m/s2,小于感知标准最小值,为无感知区域。振动区的产生源于直坡、竖曲线间受力平衡状态的转换,特别是离心力的变化影响较大。

|
| 图 4 经过5 000 m凹曲线时人体加速度、速度、位移(120 km/h) Fig. 4 Acceleration, velocity and displacement of human body after 5 000 m concave curve (120 km/h) |
| |
以车速120 km/h为例展开分析纵断面线形与平整度耦合共振效果,将纵断面设计参数固定,调整平整度波长,均在两个纵断面线形振动区内形成耦合共振,形态详见图 5,从这些运动形态中可以看出,纵断面线形是车辆行驶的基础骨架体系的作用;线形与不同波长的平整度耦合共振计算成果总体情况见图 6。

|
| 图 5 不同波长平整度与5 000 m凹曲线耦合共振人体加速度、速度、位移(120 km/h) Fig. 5 Different wavelength flatness and 5 000 m concave curve coupling resonance human body acceleration, velocity and displacement (120 km/h) |
| |

|
| 图 6 波长变化对加权加速度均方根影响图(120 km/h) Fig. 6 Influence diagram of wavelength change on weighted acceleration root mean square(120 km/h) |
| |
纵断面线形引起车辆脉冲式振动,平整度引起车辆稳定波动式振动,采用平整度引起车辆振动的相关指标为基点进行评价较为稳定,将耦合共振人体加权加速度均方根、峰值与直坡状态下平整度引起的振动对应指标之比作为分析指标,定义为扩大系数,分别设立为加权加速度均方根扩大系数和加速度峰值扩大系数,计算公式为:
|
(20) |

|
(21) |
式中,Ka为加权加速度均方根扩大系数; awo为耦合共振加权加速度均方根; awz为直坡平整度振动加权加速度均方根;Kmax为加速度峰值扩大系数; amo为耦合共振加速度峰值; amz为直坡平整度振动加速度峰值。
从加权加速度均方根计算图 7中可知,两个共振区内Ka为0.953~3.327,从加速度峰值计算图 7可知,两个共振区内Kmax为1.163~12.844,耦合共振效应显著。而两个共振区外3个稳定区,Ka,Kmax均为1,显然没有耦合共振效应。

|
| 图 7 频率变化对加速度均方根、加速度峰值耦合效果分析(120 km/h) Fig. 7 Analysis of coupling effect of frequency variation on RMS and peak acceleration (120 km/h) |
| |
根据计算成果(图 5~图 7)从耦合共振特征、形态、控制因素方面进行分析,可以将耦合共振归纳为3种耦合共振形态:线形控制型、平整度控制型、相互干扰型。
线形控制型耦合共振主要产生于平整度频率大于12 Hz的高频区域,表现特征为线形振动为主,代表性形态见图 5(a);耦合共振频率处于人体感知敏感区外,每个波长的加权加速度均方根最大值和最小值相差较小,随着波长增加,加权加速度均方根随之增加,详见图 6;而Ka,Kmax相对较大,耦合共振将更显著,详见图 7,这种类型耦合共振加权加速度均方根远小于行车舒适性标准,行车舒适性较好。
平整度控制型耦合共振位于平整度频率4~12 Hz内(低速0.5 m波长除外),平整度频率接近车辆自振频率,形成车辆共振强度大,线形引起车辆振动影响最小,代表性形态见图 5(b);耦合共振频率处于人体感知敏感区内,每个波长的加权加速度均方根最大值和最小值相差最小,加权加速度均方根处于最大区域内,并存在最大值,引起行车不适重点考查区域,详见图 6;而该区域内Ka,Kmax则相对最小区域,耦合共振弱,详见图 7。
相互干扰型耦合共振位于平整度频率小于4 Hz内低频区域,随着平整度波长增加,车辆共振强度降低,平整度、线形引起车辆振动相互干扰,代表性形态见图 5(c);耦合共振频率处于人体感知敏感区外,每个波长的加权加速度均方根最大值和最小值相差随着波长增加不断扩大,加权加速度均方根受相互影响作用效果影响变化区间较大,对行车舒适性影响介于线形控制型和平整度控制型之间,随着波长增加,加权加速度均方根随之减小,详见图 6;耦合共振效果随着线形和平整度振动间相互干扰的影响变化较大,则该区域内Ka,Kmax处于变化频繁区间内,详见图 7。
3 平整度主要参数对耦合共振影响分析 3.1 初始角对耦合共振效果影响从平整度引起车辆振动(图 3)和线形引起车辆振动(图 4)可知,两种振动产生的内力和位置均有不同的外力条件,因此两种振动相互耦合时,初始耦合位置对耦合效果影响较大。为考查两个振动耦合位置对耦合效果的影响,调整初始角在2π范围内变化,考查加速度均方根和峰值的变化,计算结果见图 8;且不同车速、波长条件下,加权加速度均方根最大值和最小值间的变化也不相同,详见图 6、图 9、图 10,变化范围为(0.29~38.12)%。对比图 6、图 9、图 10可知:车速越慢,初始角的影响越小。

|
| 图 8 初始角变化对加权加速度均方根、加速度峰值影响(120 km/h,波长3 m) Fig. 8 Influence of initial angle variation on weighted RMS acceleration and peak acceleration (120 km/h, wavelength of 3 m) |
| |

|
| 图 9 波长变化对加权加速度均方根影响(60 km/h) Fig. 9 Influence of wavelength change on weighted acceleration RMS (60 km/h) |
| |

|
| 图 10 波长变化对加权加速度均方根影响(20 km/h) Fig. 10 Influence of wavelength change on weighted acceleration RMS (20 km/h) |
| |
3.2 平整度波长对耦合共振效果影响
道路设计车速为20~120 km/h,取高中低代表车速120,60,20 km/h进行计算;路面波划分为:短波0.5~5.0 m,中波5~15 m,长波15~50 m[14];综合影响行车舒适性的车速、频率、波长,并结合频域加权系数(式(19)),确定如下代表波长为1,3,10,20,40 m进行计算分析,并在20 km/h时增设了0.5 m波长。
从计算结果可知3种车速条件下,随着波长变化的耦合共振形态、特征、结构基本相同;存在3个方面的变化:(1)因车速不同,受车辆自振频率影响,各种形态耦合共振产生的波长范围发生变化;(2)车速度变化时,同一波长的加权加速度均方根最大值和最小值差值也随着频率而变化,特别是20 km/h低速条件下,当波长较大时,平整度干扰因素变小,加权加速度均方根最大值和最小值差值越来越小;(3)对于影响行车舒适性的平整度控制型耦合共振, 波长集中于中、短波区域,而且随着车速降低,影响行车舒适性较大的波长相对越短,波长范围越小,加权加速度均方根越大,行车舒适性越差,详见图 6、图 9、图 10;而且加速度均方根扩大系数越接近1,见图 7,这充分表明在这个波段区间内,平整度振动处于主导地位。
3.3 平整度波幅对耦合共振效果影响在以上研究成果的基础上,选择3 m为代表波长,120 km/h为代表速度,展开平整度波幅对车辆振动的影响,竖曲线半径固定为5 000 m,计算结果见图 11~12,加权加速度均方根、加速度峰值和平整度波幅呈线形相关,随着平整度波幅的增加而增加,详见图 11。Ka,Kmax随着平整度振动峰值增加而出现不同程度的减少;在车速、线形参数保持不变时,线形引起的车辆振动是保持不变的,这就表明平整度和线形共同引起的耦合共振效果越来越弱。

|
| 图 11 加权加速度均方根、加速度峰值与平整度波幅关系(120 km/h) Fig. 11 Relationship between weighted acceleration RMS, peak acceleration, and flatness amplitude (120 km/h) |
| |

|
| 图 12 加权加速度均方根、加速度峰值扩大系数与平整度波幅关系(120 km/h) Fig. 12 Relationships between weighted acceleration RMS, peak acceleration expansion coefficient and flatness amplitude (120 km/h) |
| |
4 车速对耦合共振影响分析
从车辆振动敏感性和各设计车速条件下平整度使用要求角度,确定平整度主要参数:波幅4.242 mm,波长3 m;竖曲线半径统一采用5 000 m。车速变化引起加权加速度均方根、加速度峰值计算结果详见图 13~14,从计算结果可知,随着车速从20 km/h增加到60 km/h,加权加速度均方根、加速度峰值随之增加,60 km/h时达到峰值,然后随着车速的增加,加权加速度均方根、加速度峰值逐步降低,表明频率在车辆共振中的主导作用;而反映耦合共振的Ka,Kmax在80 km/h前,耦合共振作用很小,但随着车速的增加,其作用逐步开始展现。

|
| 图 13 加权加速度均方根、加速度峰值与车速关系 Fig. 13 Relationships between weighted acceleration RMS, peak acceleration, and vehicle speed |
| |

|
| 图 14 加权加速度均方根、加速度峰值扩大系数与车速关系 Fig. 14 Relationships between weighted acceleration RMS, peak acceleration expansion coefficient and vehicle speed |
| |
5 线形参数对耦合共振影响分析
从以上耦合效果和平整度参数计算分析中可知,平整度控制型耦合共振中Ka接近1,线形引起车辆振动对耦合共振影响有限;而相互干扰型耦合共振线形作用相对较大,且对行车舒适性影响相对较大,从完善最不利工况和敏感性角度出发,选择相互干扰型耦合共振进行线形参数影响研究。固定平整度主要控制参数:波幅4.242 mm,波长15 m。调整纵断面线形设计参数,在120,60,20 km/h这3个车速条件计算成果见图 15和表 3。随着竖曲线半径的增加,加权加速度均方根随之下降,且下降幅度逐渐减小,计算结论完全符合力学基本原理。随着半径的增加,离心力随之降低,线形越平坦,支撑力和重力变化也越来越减小,因此,线形引起的车辆振动越来越小,从而平整度和线形共同引起的耦合共振也越来越小,Ka也随之减少,详见图 16和表 3。

|
| 图 15 加权加速度均方根与竖曲线半径关系(波长为15 m) Fig. 15 Relationship between RMS of weighted acceleration and radius of vertical curve (wavelength of 15 m) |
| |
| 设计速度/(km·h-1) | 竖曲线半径范围/m | 指标 | 回归方程 | 相关系数 |
| 120 | 5 000~25 000 | 加权加速度均方根/(m·s-2) | αwo=-2×10-15r3+10-10r2-2×10-6r+0.133 8 | R2=0.997 4 |
| 加权加速度均方根扩大系数 | Ka=-10-14r3+8×10-10r2-2×10-5r+1.106 9 | R2=0.997 4 | ||
| 60 | 1 000~5 000 | 加权加速度均方根/(m·s-2) | αwo=-4×10-13r3+5×10-9r2-2×10-5r+0.389 7 | R2=0.998 6 |
| 加权加速度均方根扩大系数 | Ka=-10-12r3+10-8r2-6×10-5r+1.096 5 | R2=0.998 6 | ||
| 20 | 200~1 000 | 加权加速度均方根/(m·s-2) | αwo=-5×10-11r3+10-7r2-9×10-5r+0.051 4 | R2=0.996 |
| 加权加速度均方根扩大系数 | Ka=-2×10-9r3+4×10-6r2-0.003 1r+1.812 4 | R2=0.996 8 |

|
| 图 16 加权加速度均方根扩大系数与竖曲线半径关系(波长为15 m) Fig. 16 Relationship between weighted acceleration RMS expansion coefficient and vertical curve radius (wavelength of 15 m) |
| |
6 结论
(1) 在影响行车舒适性的耦合共振中平整度作用效果较大,纵断面线形作用相对有限;行车速度和平整度波长形成的频率是主导平整度和纵断面线形耦合振动关键因素,决定了行车舒适性指标及振动形态、类型,并直接影响各耦合因素相互作用效果和变化范围。
(2) 对行车舒适性产生严重影响的耦合共振中,平整度起主导作用,高速集中在中、短波长,随着车速降低,波长越来越短,范围越来越小。
(3) 平整度波幅和初始角参数均对耦合共振有较大影响:平整度波幅与耦合振动正向线形相关,但随着波幅的增加耦合作用效果呈二次抛物线衰减;平整度初始角使耦合共振效果出现波动式变化,波动范围随着行车速度降低而减小。
(4) 耦合共振评价指标加权加速度均方根、加速度峰值及其扩大系数关系与车速呈多次抛物线函数关系,加权加速度均方根、加速度峰值的抛物线峰值取决于车速和平整度形成的频率。
(5) 竖曲线半径越大对耦合共振影响越小,加权加速度均方根、加速度峰值及其扩大系数关系和竖曲线半径均呈三次抛物线函数关系。
| [1] |
常成利, 毛利建, 刘恒柏. 激光断面仪计量检定技术研究[J]. 公路交通科技, 2010, 27(5): 1-5. CHANG Cheng-li, MAO Li-jian, LIU Heng-bai. Research on Metrological Technology of Laser Profiler[J]. Journal of Highway and Transportation Research and Development, 2010, 27(5): 1-5. |
| [2] |
魏国忠, 侯飞, 张衡, 等. 高速公路勘测中车载激光点云高精度校正可行性分析[J]. 测绘通报, 2016(8): 20-24. WEI Guo-zhong, HOU Fei, ZHANG Heng, et al. Analysis of High-accuracy Calibration Feasibility for Laser Point Cloud Scanned by Vehicle-borne Mobile Mapping System in Freeway Surveying[J]. Bulletin of Surveying and Maping, 2016(8): 20-24. |
| [3] |
杜永平, 王鹏. 旧路改造工程中线形变形和修复研究[J]. 中国市政工程, 2023(2): 21-25. DU Yong-ping, WANG Peng. Research on the Linear Deformation and Repair[J]. China Municipal Engineering, 2023(2): 21-25. |
| [4] |
陈仁朋, 贾瑞雨, 姜正晖, 等. 不均匀沉降条件下车-路相互作用及道路纵面设计分析[J]. 中国公路学报, 2017, 30(4): 1-8, 23. CHEN Ren-peng, JIA Rui-yu, JIANG Zheng-hui, et al. Analyses of Vehicle-road Interation Under the Condition ofr Uneven Settlement and Road Profile Alignment Design[J]. China Journal of Highway and Transport, 2017, 30(4): 1-8, 23. DOI:10.3969/j.issn.1001-7372.2017.04.001 |
| [5] |
张洪亮, 胡长顺. 基于五自由度车辆模型的桥头搭板容许纵坡变化值研究[J]. 土木工程学报, 2005, 38(6): 125-131. ZHANG Hong-liang, HU Chang-shun. A Study on the Allowable Deferential Slope of the Approach Slab with Five-degreee-freedom Vehicle Model[J]. China Civil Engineering Journal, 2005, 38(6): 125-131. |
| [6] |
刘国杰, 陶向华, 黄晓明. 基于人车路相互作用的路桥接合处差异沉降控制标准[J]. 公路交通科技, 2008, 25(6): 44-49. LIU Guo-jie, TAO Xiang-hua, HUANG Xiao-ming. Differential Settlement Control Criteria of Bridge-approach Junction Based on People-vehicle-road Interaction[J]. Journal of Highway and Transportation Research and Development, 2008, 25(6): 44-49. |
| [7] |
郑木莲, 孟建党, 张世铎, 等. 路桥过渡段上车内人体舒适性评价方法[J]. 长安大学学报(自然科学版), 2012, 32(3): 1-6. ZHENG Mu-lian, MENG Jian-dang, ZHANG Shi-duo, et al. Evaluation Method of Human Comfort in Vehicle at Transition Section between Bridge Abutment and Embankment[J]. Jounal of Chang'an University (Natural Science Edition), 2012, 32(3): 1-6. |
| [8] |
杨少伟. 道路勘测设计[M]. 北京: 人民交通出版社, 2012. YANG Shao-wei. Road Survey and Design[M]. Beijing: China Communications Press, 2012. |
| [9] |
葛婷, 符锌砂, 李海峰, 等. 公路空间几何特性对汽车运动影响[J]. 同济大学学报(自然科学版), 2016, 44(12): 1867-1872. GE Ting, FU Xin-sha, LI Hai-feng, et al. Influence of Spatial Geometric Properties of Highway Alignment on Vehicle Kinematics[J]. Jounal of Tongji University (Natural Science), 2016, 44(12): 1867-1872. |
| [10] |
陈城, 孙立军, 杜豫川. 路面平整度对小汽车噪声的影响研究[J]. 公路, 2007(1): 122-125. CHEN Cheng, SUN Li-jun, DU Yu-chuan. Research on Influence of Pavement Roughness on Noise of Car[J]. Highway, 2007(1): 122-125. |
| [11] |
孙立军, 耿媛婧, 周晓青. 车辆噪声与城市道路路面平整度关系的试验研究[J]. 公路交通科技, 2007, 24(6): 24-28. SUN Li-jun, GENG Yuan-jing, ZHOU Xiao-qing. Experimental Research on the Relation between Motor Vehicle Noise and Pavement Roughness of Urban Road[J]. Journal of Highway and Transportation Research and Development, 2007, 24(6): 24-28. |
| [12] |
刘强, 张志祥. 基于平整度的改建公路用户油耗模型及其测算方法[J]. 公路交通科技, 2021, 38(2): 132-138. LIU Qiang, ZHANG Zhi-xiang. Analysis on Reconstructed Highway User Fuel Consumption Model and Calculation Method Based on Pavement Roughness[J]. Journal of Highway and Transportation Research and Development, 2021, 38(2): 132-138. DOI:10.3969/j.issn.1002-0268.2021.02.017 |
| [13] |
单丽岩, 侯相深, 马松林. 行车舒适度路面不平度评价标准[J]. 哈尔滨工业大学学报, 2008, 40(6): 935-938. SHAN Li-yan, HOU Xiang-shen, MA Song-lin. Evaluation Standard of Pavement Roughness Based on Ride Comfort[J]. Journal of Harbin Institute of Technology, 2008, 40(6): 935-938. DOI:10.3321/j.issn:0367-6234.2008.06.022 |
| [14] |
周晓青, 孙立军. 国际平整度指数与行驶车速的关系[J]. 同济大学学报(自然科学版), 2005, 33(10): 1323-1327. ZHOU Xiao-qing, SUN Li-jun. Relationship Between International Roughness Index and Velocity of Quarter Car[J]. Jounal of Tongji University(Natural Science), 2005, 33(10): 1323-1327. DOI:10.3321/j.issn:0253-374X.2005.10.009 |
| [15] |
CHIU Liu, WANG Zhong-ren. 行驶质量评价指标的回顾和展望[J]. 上海公路, 2006(1): 7-9, 4. CHIU liu, WANG Zhong-ren. Physical Characterization of Pavement Profile and Ride Quality, Past, Present, and Future[J]. Shanghai Highways, 2006(1): 7-9, 4. |
| [16] |
CROLLA D, 喻凡. 车辆动力学及其控制[M]. 北京: 人民交通出版社, 2004. CROLLA D, YU Fan. Vehicle dynamics and control[M]. Beijing: China Communications Press, 2004. |
| [17] |
PARK S J, Park S C, Kim J H, et al. Biomechanical Parameters on Body Segments of Korean Adults[J].
International Journal of Industrial Ergonomics, 1999, 23(1): 23-31.
|
| [18] |
MAEDA S, MANSFIELD N J. Comparison of the Apparent Mass During Exposure to Whole-body Vertical Vibration between Japanese Subjects and ISO 5982 Standard[J].
Industrial Health, 2005, 43(3): 436-440.
DOI:10.2486/indhealth.43.436 |
| [19] |
侯之超, 高江华, 何乐. 坐姿人体垂向振动特性及其三自由度模型参数[J]. 哈尔滨工程大学学报, 2011, 32(9): 1223-1227. HOU Zhi-chao, GAO Jiang-hua, HE Le. Vertical Vibration Characteristics of Seated Human Bodies and the Parameners of a Biodynamic Model with Tree Degrees of Freedom[J]. Jounal of Harbin Engineering University, 2011, 32(9): 1223-1227. |
| [20] |
杨宜谦. 人体全身振动的感知阈值[J]. 土木建筑与环境工程, 2013, 34(增2): 54-60. YANG Yi-qian. Whole-body Vibration Perception Thresholds[J]. Journal of Civil, Architectural and Environmental Engineering, 2013, 34(S2): 54-60. |