 2023, Vol. 40
2023, Vol. 40扩展功能
文章信息
- 刘源翔, 侯亚楠, 雷凌昱, 孟春雷, 王宏丹.
- LIU Yuan-xiang, HOU Ya-nan, LEI Ling-yu, MENG Chun-lei, WANG Hong-dan
- 基于线性自抗扰控制的隧道通风节能控制研究
- Study on Energy Saving Control of Tunnel Ventilation Based on Linear Active Disturbance Rejection Control
- 公路交通科技, 2023, 40(11): 180-187
- Journal of Highway and Transportation Research and Denelopment, 2023, 40(11): 180-187
- 10.3969/j.issn.1002-0268.2023.11.021
-
文章历史
- 收稿日期: 2023-03-17




 ,
, 近10 a来,随着交通建设的发展,高速公路的建设路线逐渐由平原地带向山区高原发展,隧道桥梁也逐渐增多,不但大大改善了行车环境,改变道路线形,同时也提高了车速、节约燃料、节省时间,有效保护了生态环境[1-2]。截止到2021年年底,全国公路总里程达到了528.07×104 km,公路隧道也达到了23 268处、2 469.89×104 m。
公路隧道是一个半封闭系统,自然通风对隧道内空气的置换作用较少。而隧道内行驶车辆容易产生一氧化碳(CO)、未燃尽颗粒物质以及其他异味气体等,这些气体一方面影响车辆的驾驶视线,另一方面也对驾驶人员和隧道施工人员的生命安全带来危险[3-5]。需要采取相应措施,将隧道内的有害气体和粉尘控制在容许的限度内。目前国内主要使用风机来处理CO浓度和烟雾浓度,即通过建立合适的通风控制系统,得到实际需要的风机数量,来稀释污染物的浓度以达到污染物浓度标准,从而保证汽车产生的污染物浓度在浓度标准要求以下[6-9]。
在高速公路中较长、特长的隧道,一般在不同位置布设多对风机,通过对风机对数的启停调节隧道空气质量。但针对短型隧道,往往只需要存在一对或者两对射流风机,通过控制风机的转速调节隧道空气质量。普通的风机在启动时瞬间电流过大,对电网冲击较大,通过采用变频器控制射流风机,能够有效缓解风机启动对电网的冲击,并且还能起到节能效果[10]。
对隧道通风进行控制时,隧道内的环境受到车流量、车速、隧道外天气、隧道内事故等因素的影响,空气质量参数经常变化,是一个典型的非线性对象。目前国内外在隧道通风控制中主要为开环控制和闭环反馈控制。其中开环控制主要通过检测得到的有害气体浓度,根据设定的程序和逻辑,将风机数量和功率打开到一个设定值,待浓度降到标准值后,再将风机关闭。此种控制方式较为简单,容易实现,但是在控制过程中无法根据有害气体浓度变化对风机进行实时调节,容易造成系统的响应不足或者超调。而闭环反馈控制通过监测有害气体浓度,根据控制算法实时计算风机的开启功率和风机数量,有效实现控制的稳定,如图 1所示。

|
| 图 1 闭环反馈控制方式结构 Fig. 1 Structure of closed-loop feedback control method |
| |
目前国内外对隧道通风进行闭环控制时主要采用PID控制。PID控制应用范围较广,不需要对系统进行完整的建模,但是控制参数固定,当系统参数在较大范围变化时,控制效果难以保证。有些文献中也采用了模糊控制,并将车流量数据引入到控制系统中,基于车流量数据预估CO和烟雾浓度,实现预估前馈的模糊控制。虽然模糊控制器能够基于输入的反馈量和预估的浓度值对控制器的参数进行调节,但是对模糊控制器进行设计时参数需要调整的参数较多,控制器较为复杂,调试的难度也较大,对设计者的要求较高[11-13]。
自抗扰控制器不需要完全知道控制对象的具体模型,只需了解控制对象的系统阶数。自抗扰控制器通过构建扩张状态观测器,对模型中未知量和外界的扰动项作为一种扩张状态进行观测,并进行实时估计和补偿。该控制方法对系统模型的精度要求较低,当系统参数在较大范围内变动时依然具有较好的控制效果[14-15]。
本研究分析隧道环境参数的变化特点,对隧道的通风模型进行等效成一个参数摄动的一阶时滞系统。通过引入线性自抗扰控制算法,以系统控制稳定为目标,选择控制器参数,并进行建模仿真。仿真结果表明,采用线性自抗扰控制技术的隧道通风系统具更快的响应速度,更小的风机功率需求,以及更强的适应性和抗扰能力。
1 隧道通风模型的等效分析隧道中污染物浓度主要为车辆尾气排放的CO浓度和烟雾浓度,在实际工作中,烟雾浓度相比CO浓度更容易超标,是隧道通风控制决策中最主要的控制对象,因此本研究以降低烟雾浓度为目标对控制器进行设计[16]。
隧道通风控制对象存在非线性、滞后性等特点,难以建立精确的控制模型,需要先对控制目标进行等效处理。隧道通风过程可以简化成两个过程:一个是0压过程;一个是压力上升过程。当风机刚开始启动时,风机把新风从隧道外送到隧道内,隧道内的空气压力基本保持不变,该过程可以等效成一个纯滞后环节;而当风机运行一段时间后,隧道内的空气压力开始变化,压力逐渐变化到一个稳定的状态,这个变化过程可以等效成为一阶惯性环节。将0压过程与升压过程进行结合,隧道通风系统中的压力变化模型即可等效为一个具有纯滞后环节的一阶惯性系统[17]。等效模型G1 (s)如式(1)所示:
|
(1) |
式中,P (s)为隧道压强;ω (s)为风机功率;K1为系统增益;T1为系统的时间常数;τ1为滞后时间。
当风机开启台数确定后,随着隧道内压力的动态变化和逐步稳定,烟雾浓度从基本不变逐渐达到一个动态稳定的状态,因此该过程也可以等效为一个具有滞后的一阶惯性环节。烟雾浓度变化环节的数学模型G2 (s)如式(2)所示:
|
(2) |
式中,C (s)为公路隧道内烟雾浓度;K2为系统增益;T2为系统的时间常数;τ2为滞后时间。
综合上述模型,对于烟雾浓度,系统等效模型G (s)如式(3)所示:
|
(3) |
考虑计算后T1,T2相对较小,可以将其近似为0。并令:

|
(4) |
则式(4)简化等效为:
|
(5) |
式中,K为系统增益;T为系统的时间常数;τ为滞后时间。由于隧道环境受到车流量、车速、隧道外气象、隧道事故等一系列因素的影响,空气参数经常变化,因此,可以将式(5)看成是系统增益、时间常数和滞后时间摄动的一阶时滞系统。由于时滞环节的存在,系统控制时稳定性降低,动态性能较差,控制时容易引起超调或振荡。
2 自抗扰控制器的设计 2.1 线性自抗扰控制原理针对隧道通风的等效模型,以式(5)为例,先不考虑模型的时滞环节e-τs,记:
|
(6) |
针对式(6)一阶惯性系统设计线性自抗扰控制器,线性自抗扰控制以线性扩张状态观测器(Linear Extended State Observer,LESO)为核心,典型一阶惯性系统线性自抗扰控制结构如图 2所示[18-19]。

|
| 图 2 典型一阶惯性系统线性自抗扰控制结构 Fig. 2 Typical LADRC structure for first-order system |
| |
式(6)的微分方程如式(7)所示:
|
(7) |
引入调节参数b0, b0>0, 并令x2为系统的未知量,则式(7)可以写成:
|
(8) |
其中:
|
(9) |
从图 2的线性自抗扰控制器典型结构中看出,线性扩张状态观测器对状态C0进行了估计,考虑烟雾浓度C0可以通过传感器进行直接测量,因此我们可以对控制器进行简化。记x1=C0, u=ω, 
|
(10) |
传统的二阶扩张状态观测器需要对输出量C0和总体扰动量f (C0,ω)观察,而输出量C0可直接通过传感器进行直接获得,因此,针对式(10)可以设计基于降阶观测器的线性自抗扰控制器。令y = 
|
(11) |
对式(11)构造线性扩张状态观测器:

|
(12) |
式中,z2为降阶观测器的估计量,用于对f (C0,ω) 的观测;w为观测器的可调参数为观测器的带宽;性能良好的扩张状态观测器可以使z2很好地跟踪系统的总扰动和x2。
将式(11)代入到式(12)中,得到:

|
(13) |
式中b0为观测器的可调参数, 为观测器的增益。
并构建比例控制器kp,设计控制规律u为:
|
(14) |
结合式(12)~(14)可得:
|
(15) |
得到一阶降阶观测器LADRC的控制框图如图 3所示。

|
| 图 3 降阶线性自抗扰控制器结构 Fig. 3 Structure of order-reduced LADRC |
| |
2.2 考虑时滞环节的控制器设计
自抗扰控制器的设计并不过分地依赖于被控对象的数学模型。在设计过程中重要的是要了解需要按“几阶”模型来设计控制器,而实际的被控对象的数学描述本质上被当成了一个“信号产生器",实现从输入到输出的转化,为扩张观测器提供控制系统的输出信息。在第1节的分析得到的隧道通风模型看出,控制对象为一阶时滞系统,从线性自抗扰控制的角度来看,控制器的设计是完全一样的。因此控制器的等效结构图如图 4所示。

|
| 图 4 一阶时滞系统的控制器结构 Fig. 4 Structure of controller for first-order time-delay system |
| |
基于图 4,整个系统的闭环传递函数如式(16)所示:

|
(16) |
在实际工作过程中,当隧道环境变化时,希望能够快速将浓度调整到合适指标,降低由于能见度不足和空气质量差引起的交通安全,因此,在控制时需要保持系统的稳定,针对式(16)的控制闭环传递函数,令:

|
(17) |
GL1与GL相比,只是在分子中缺少延迟项e-τs,但其他均一致,可认为具有相同的系统稳定性。GL1的特征方程如式(18)所示:

|
(18) |
将式(18)中的延迟项e-τs在0点进行二阶泰勒展开,既exp(e-τs)=1-τs+0.5τ2s2, 则式(18)变为:

|
(19) |
其中:
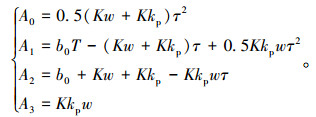
|
(20) |
为了保障系统运行的稳定,根据劳斯稳定性判据,需式(19)中的各个系数大于0,并且A1A2-A0A3>0;
计算可得控制参数需同时满足下列条件[20]:
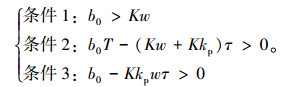
|
(21) |
当基于设计文件估计得到的系统的时间常数T、系统增益K和滞后时间τ后,可通过上面条件对控制器参数进行选择。
3 仿真研究为了验证隧道通风控制中线性自抗扰控制器的有效性,结合文中建立的隧道通风模型,以某条短隧道为控制研究对象,其中隧道全长为890 m,通风方式是纵向通风,通风风机是对旋轴流风机,采用变频器控制风机,风机额定功率30 kW,额定转速是2 930 r/min,额定电流为28.6 A。拟合形成隧道通风模型的仿真数据如下:K=10,T=6,τ=3,当w=5时,基于式(21)的约束,同时考虑控制不能产生正反馈,需b0>0, kp>0。得到参数b0的约束下限和kp的约束上限, 如图 5中阴影部分所示。

|
| 图 5 b0约束下限和kp约束上限 Fig. 5 Lower limit of b0 and upper limit of kp |
| |
考虑隧道的空气环境随着隧道内车流量、外部气象等相关因素进行变化,建立的通风模型的参数也会在一定范围内进行摄动。当通风系统模型参数在设计参数的基础上存在25%~30%变化时,假设各参数变化范围为:K变化范围为7~13;T变化范围为4~8;τ变化范围为2~4。得到控制参数b0的约束下限变化范围和kp的约束上限变化范围,如图 6所示。

|
| 图 6 b0约束下限和kp约束上限变化范围 Fig. 6 Variation range of lower limit of b0 and upper limit of kp |
| |
可以看出,在多种条件约束下控制参数的选择区域如图 6所示的阴影部分,将图 6的阴影部分进行放大,得到kp和b0的选择区域,如图 7所示。

|
| 图 7 kp和b0选择区域 Fig. 7 Selection area of kp and b0 |
| |
考虑系统控制过程中的稳定性,控制器参数不宜过大,在此区域中选择控制参数b0=70,kp=0.2对系统进行控制。并与传统PID控制进行比较,其中PID控制器中的各个参数根据隧道通风模型系统初始状态进行设计。
为了方便计算与比较,仿真时控制指令、反馈的烟雾浓度、风机运行功率进行归一化处理,为无纲量参数,并考虑风机的功率上限,设置风机最大功率值为1.5。采用阶跃信号作为控制信号,仿真时长为100 s。
图 8为单位阶跃响应下采用不同控制方式下的控制效果,可以看出,采用传统的PID控制器时烟雾浓度变化量的超调较大,超调量达到了18%,调整时间较长,在40 s时才达到稳定。而采用线性自抗扰控制器时,差不多在20 s的时候就能够稳定地达到了目标值,而且调节过程中没有出现超调。

|
| 图 8 单位阶跃信号下的烟雾浓度变化量 Fig. 8 Variation of smoke concentration when inputting unit step signal |
| |
图 9为不同控制器下的风机功率情况可以看出,在调整过程中,采用ADRC控制器调节时,相比传统PID控制,风机整体运行功率较小,功率的波动不大,能够很快达到稳定状态。

|
| 图 9 风机功率变化 Fig. 9 Variation of fan power |
| |
通过对风机功率进行积分,得到调节过程中的能耗数据,并将两种控制模式的能耗数据进行做差比较,即:

|
(22) |
式中EPID,EADRC和ωPID,ωADRC分别为传统控制器模式(PID)模式和自抗扰控制模式(ADRC)的能耗以及功率。计算后得到不同控制模式下能耗差的变化曲线如图 10所示。从图 10中可知,相比传统PID控制,使用自抗扰控制器在调节过程能减少6~7个单位左右的能耗,能够有效降低系统用能。

|
| 图 10 不同控制模式下能耗差变化 Fig. 10 Variation of energy consumption difference by different control modes |
| |
考虑隧道的空气环境随着隧道内车流量、外部气象等相关因素进行变化,建立的通风模型的参数也会在一定范围内进行摄动。通过改变模型参数模拟外界环境的变化,仿真分析不同控制器的控制能力。图 11为模型的系统增益降低20%,系统延时提升30%(K=8, τ=4)时的控制曲线。可以看出,由于系统模型的变化,PID控制的超调量比较大(超调量差不多达到20%),调节时间也较长(到45 s时才逐渐稳定)。而采用线性自抗扰控制器产生了较小的超调(约5%~10%),但很快进入稳定状态。

|
| 图 11 单位阶跃信号下的烟雾浓度变化量(K=8, τ=4) Fig. 11 Variation of smoke concentration when inputting unit step signal(K=8, τ=4) |
| |
图 12~13为不同控制器下的风机功率和能耗差的变化情况,从图 12~13上可以看出,采用PID控制器时,风机一度达到了满负荷运行状态(10~25 s时),而采用ADRC控制时,风机一直在一个平缓的状态下运行,逐步达到稳定状态,整个过程中,不同控制系统的能耗差达到了7~8个单位。

|
| 图 12 风机功率变化(K=8, τ=4) Fig. 12 Variation of fan power(K=8, τ=4) |
| |

|
| 图 13 不同控制模式下能耗差变化(K=8, τ=4) Fig. 13 Variation of energy consumption difference by different control modes (K=8, τ=4) |
| |
图 14为当系统模型的多个参数同时摄动情况下,采用线性自抗扰控制器的调节情况,其中ΔK,ΔT,Δτ模型参数波动的百分比。从图 14中可以看出,在系统增益K、时间常数T和滞后时间τ等参数摄动量达到±(20%~30%)的情况下,除了ΔK=-0.3,ΔT=-0.3,Δτ=-0.3这种极端条件,系统依然能够保持一定的稳定性。即便在极端条件下,系统的超调量基本在16%左右,在35 s时也达到稳定状态。由此可见,线性自抗扰控制器对系统参数变化造成输出的影响具有一定的抑制能力。

|
| 图 14 参数摄动时单位阶跃响应 Fig. 14 Unit step response when parameters perturbation |
| |
4 结论
本研究对隧道通风过程进行了等效和简化,近似为一个参数摄动的一阶惯性时滞系统。并详细构建了基于线性自抗扰技术的控制模型,该方法的控制对象不需要有精确的数学模型,只需要了解系统阶数和粗略估计的参数。通过仿真与传统PID控制方法进行比较,线性自抗扰控制器能够快速达到稳定状态,系统调节过程中风机所需的运行功率较小,能够有效降低用能。同时,面对隧道通风系统模型参数摄动时,线性自抗扰控制器能够有效地抑制参数波动对输出量的影响,具备更好的抗干扰性和鲁棒性。
| [1] |
高勇卿. 公路长大隧道智能化监控与交通安全措施研究[D]. 西安: 长安大学, 2016. GAO Yong-qing. Study on the Intelligent Monitoring and Traffic Safety Measures of Highway Long Tunnel[D]. Xi'an: Chang'an University, 2016. |
| [2] |
王璐. 公路隧道通风系统风机群节能控制方法[D]. 西安: 长安大学, 2020. WANG Lu. Energy-saving Control Method of Jet Fans in Highway Tunnel Ventilation System[D]. Xi'an: Chang'an University, 2020. |
| [3] |
杨秀军, 石志刚, 汤召志, 等. 基于性能化分析的港珠澳大桥沉管隧道通风系统设计[J]. 公路交通科技, 2017, 34(增1): 80-86, 90. YANG Xiu-jun, SHI Zhi-gang, TANG Zhao-zhi, et al. Design of Ventilation System of HZMB Immersed Tunnel Based on Performance Analysis[J]. Journal of Highway and Transportation Research and Development, 2017, 34(S1): 80-86, 90. |
| [4] |
张志刚, 徐莹, 张锦秋. 基于随机森林的公路隧道CO气体浓度预测模型[J]. 科学技术与工程, 2022, 22(26): 11729-11736. ZHANG Zhi-gang, XU Ying, ZHANG Jin-qiu. Prediction Model of CO Concentration in Highway Tunnel Based on Random Forest[J]. Science Technology and Engineering, 2022, 22(26): 11729-11736. |
| [5] |
汤召志, 杨秀军, 徐东彬. 沉管隧道智能化通风系统软件开发与节能分析[J]. 公路交通科技, 2017, 34(增1): 75-79. TANG Zhao-zhi, YANG Xiu-jun, XU Dong-bin. Software Development and Energy Saving Analysis in Intelligent Immersed Tunnel Ventilation System[J]. Journal of Highway and Transportation Research and Development, 2017, 34(S1): 75-79. |
| [6] |
万建国, 彭劲松. 公路隧道营运通风节能优化设计探讨[J]. 现代隧道技术, 2019, 56(增2): 471-477. WAN Jian-guo, PENG Jin-song. Discussion on Optimization Design of Ventilation and Energy Saving in Highway Tunnel Operation[J]. Modern Tunnelling Technology, 2019, 56(S2): 471-477. |
| [7] |
严涛, 李坤杰, 秦鹏程, 等. 高海拔公路隧道运营通风关键技术研究综述[J]. 现代隧道技术, 2019, 56(增2): 88-95. YAN Tao, LI Kun-jie, QIN Peng-cheng, et al. Review on Key Technologies of Operational Ventilation in High-altitude Highway Tunnels[J]. Modern Tunnelling Technology, 2019, 56(S2): 88-95. |
| [8] |
卢毅, 付帅, 李论之. 矩形大断面水下隧道射流风机布设位置优化仿真[J]. 公路交通科技, 2021, 38(3): 81-86, 121. LU Yi, FU Shuai, LI Lun-zhi. Simulation of Optimal Layout of Jet Fans in Large Rectangular Sectional Underwater Tunnel[J]. Journal of Highway and Transportation Research and Development, 2021, 38(3): 81-86, 121. DOI:10.3969/j.issn.1002-0268.2021.03.011 |
| [9] |
郑晅, 付帅, 李雪. 特长公路隧道复杂风机网络协同控制系统架构[J]. 科学技术与工程, 2020, 20(10): 4125-4133. ZHENG Xuan, FU Shuai, LI Xue. Design of Collaborative Control System for Complex Fan Network of Long Highway Tunnel[J]. Science Technology and Engineering, 2020, 20(10): 4125-4133. |
| [10] |
刘柱, 卢剑锋, 王一达. 基于模糊控制的隧道射流风机变频器应用和仿真[J]. 现代机械, 2018(5): 69-72. LIU Zhu, LU Jian-feng, WANG Yi-da. Application and Simulation of Frequency Converter on Tunnel Jet Fan Based on Fuzzy Control[J]. Modern Machinery, 2018(5): 69-72. |
| [11] |
王成志, 彭毅, 张锐. 模糊控制技术在隧道射流风机中的应用[J]. 计算机测量与控制, 2014, 22(11): 3594-3596. WANG Cheng-zhi, PENG Yi, ZHANG Rui. Application of Fuzzy Control Technology in Tunnel Jet Fan[J]. Computer Measurement & Control, 2014, 22(11): 3594-3596. DOI:10.3969/j.issn.1671-4598.2014.11.042 |
| [12] |
李科, 李鹏辉, 蔡爽, 等. 基于模糊控制的隧道有害气体治理技术研究[J]. 隧道建设, 2022, 42(增1): 120-127. LI ke, LI Peng-hui, CAI Shuang, et al. Research on Tunnel Harmful Gas Control Technology Based on Fuzzy Control[J]. Tunnel Construction, 2022, 42(S1): 120-127. |
| [13] |
赵航. 基于模糊PID控制的通风风量调节系统研究[J]. 现代电子技术, 2016, 39(16): 125-127. ZHAO Hang. Study on Ventilation Air Quantity Control System Based on Fuzzy PID Control[J]. Modern Electronics Technique, 2016, 39(16): 125-127. |
| [14] |
金美花, 刘树艳. 基于线性自抗扰的煤矿局部通风机风量调节系统研究[J]. 煤炭技术, 2018, 37(12): 266-268. JIN Mei-hua, LIU Shu-yan. Research on Air Volume Regulation System of Local Fan in Coal Mine Based on Linear ADRC[J]. Coal Technology, 2018, 37(12): 266-268. |
| [15] |
刘源翔, 聂聆聪, 张皎, 等. 基于线性自抗扰控制器的燃气流量可调发生器压强控制算法研究[J]. 推进技术, 2015, 36(12): 1768-1773. LIU Yuan-xiang, NIE Ling-cong, ZHANG Jiao, et al. Research on Pressure Control Algorithm of a Flow Adjustable Gas Generator Based on Linear Active Disturbance Rejection Control[J]. Journal of Propulsion Technology, 2015, 36(12): 1768-1773. |
| [16] |
张晓松, 金涛, 林东. 高速公路隧道通风系统的多参量模糊控制研究[J]. 重庆交通大学学报(自然科学版), 2016, 35(4): 20-24. ZHANG Xiao-song, JIN Tao, LIN Dong. Research on Multi-parameter Fuzzy Control Algorithm of Highway Tunnel Ventilation System[J]. Journal of Chongqing Jiaotong University(Natural Science), 2016, 35(4): 20-24. |
| [17] |
李月全. 基于模糊PID控制的隧道通风节能系统的研究[D]. 太原: 中北大学, 2021. LI Yue-quan. Research of Tunnel Ventilation Energy Saving System Based on Fuzzy PID Control[D]. Taiyuan: North University of China, 2021. |
| [18] |
王永帅, 陈增强, 孙明玮, 等. 一阶惯性大时滞系统Smith预估自抗扰控制[J]. 智能系统学报, 2018, 13(4): 500-508. WANG Yong-shuai, CHEN Zeng-qiang, SUN Ming-wei, et al. Smith Prediction and Active Disturbance Rejection Control for First-order Inertial Systems with Long Time-delay[J]. CAAI Transactions on Intelligent Systems, 2018, 13(4): 500-508. |
| [19] |
刘亚超, 高健, 钟永彬, 等. 一阶大时滞系统的滞后时间削弱自抗扰控制[J]. 中南大学学报(自然科学版), 2021, 52(5): 1493-1501. LIU Ya-chao, GAO Jian, ZHONG Yong-bin, et al. Reduced Time-delay Active Disturbance Rejection Control for First-order Systems with Large Time-delay[J]. Journal of Central South University (Science and Technology), 2021, 52(5): 1493-1501. |
| [20] |
杨瑞光. 线性自抗扰控制的若干问题研究[D]. 天津: 南开大学, 2011. YANG Rui-guang. On Linear Active Disturbance Rejection Control[D]. Tianjin: Nankai University, 2011. |