 2023, Vol. 40
2023, Vol. 40扩展功能
文章信息
- 白冰, 杨飞.
- BAI Bing, YANG Fei
- 斜拉索受力状态及几何参数的快速迭代分析方法
- A Method for Fast Iteration Analysing Mechanical State and Geometric Parameters of Stay Cable
- 公路交通科技, 2023, 40(5): 58-64
- Journal of Highway and Transportation Research and Denelopment, 2023, 40(5): 58-64
- 10.3969/j.issn.1002-0268.2023.05.008
-
文章历史
- 收稿日期: 2022-04-08





2. 中路高科交通检测检验认证有限公司, 北京 100088
2. China-Road Transportation Verification & Inspection Hi-Tech Co., Ltd., Beijing 100088, China
斜拉索是现代斜拉桥最重要的结构组成之一[1],准确厘清其受力行为特点对于大跨度斜拉桥的高质量设计、施工以及安全运营均具有十分重要的意义。
对于斜拉索安装分析,其无应力长度、倾角及线形是重要的几何控制参数[2],针对这方面内容,国内外学者已开展了相应研究。Jayaraman等[3]基于Irvine[4]所推导的悬链线索自重状态方程首先提出了弹性悬链线索单元的构建方法。张立新等[5]基于Ridders改进弦割法迭代技术并结合无应力索长作为迭代控制量,对连续长索的无应力索长求解进行了研究。方志等[6]根据索端竖向分力与无应力索长之间关系,利用Levenberg-Marquardt算法,提出了一种新的非线性迭代求解技术,该方法精度较高、性能优良,但计算相对繁琐,不便于工程应用[7]。为解决这一问题,赵雷等[8]采用梁端索夹角与索力水平分量作为迭代未知量,结合悬链线理论,对分幅斜拉桥斜拉索的无应力索长确定问题进行了研究,但该方法需要联立迭代求解非线性方程组,计算仍稍显繁琐。此外,Jung等[9]基于索几何线形方程表达式,通过Newton迭代法对斜拉索无应力索长进行求解,取得了一定效果。上述研究对于斜拉索无应力索长计算等问题进行了深入探讨,有力推动了斜拉索构件精细化分析进展。但就深入理解其力学行为而言,无应力索长仅是表征斜拉索力学要素的一部分,其还包括索力沿索长变化规律、索线形以及索倾角方程等信息,他们互为补充,共同构成了斜拉索完整的力学要素信息。同时,对于索的几何、力学参数求解,既有方法虽然精度较高,但其一定程度上仍存在不够简便的问题,有必要对其进行进一步探讨。
鉴于这一情况,首先根据悬链线理论,研究了斜拉索受力线形方程参数的快速迭代格式,建立了适于工程应用的斜拉索关键几何、力学特征的分析求解方法。在此基础上,将求解结果与非线性有限元方法进行对比,验证了所提出方法的有效性。最后,以一项工程实例,对其进行了相应分析和探讨。
1 基于悬链线理论的斜拉索受力状态及几何参数求解方法 1.1 斜拉索线形方程建立对于斜拉索线形,众多学者已进行相关探索。参照其思路[10]由索力几何关系出发对其进行描述,见图 1。

|
| 图 1 斜拉索受力及索微元几何示意图 Fig. 1 Illustration of stresses on stay cable and geometry of cable element |
| |
鉴于索力T水平分量H沿长不变,而竖向分量V沿长增量等于索重增量[11],故有

|
(1) |

|
(2) |
式中,ρ为索线重度;dl为索长微元。将式(1)代入式(2)则

|
(3) |
为简化方程,对θ分析。由图 1索微元关系,可得

|
(4) |
结合微元几何关系以及sinh-1 (·)微分形式d (sinh-1(t))=

|
(5) |
该式表征了索力T与其几何坐标之间的微分关系。
进一步引入T与H关系H/T=dx/dl[12],积分可得:
|
(6) |
式中,C和D为积分常数。式(6)即为斜拉索线形方程一般形式[10],其在其他文献亦有介绍,但各自推导方法和表达形式不尽相同。
为求解式(6)中H,C和D这3个未知参量,令(x1, y1)= (0, 0),(x2, y2)= (xj-xi, yj-yi),代入式(6)[4]
|
(7) |
|
(8) |
同时,引入目标索力Tx=0=Ti,根据T2=V2+H2,则[13]
|
(9) |
值得说明的是,上式并非唯一形式的第3组边界条件表达,其亦可采用索端夹角[8]或索力分量合成[6]等形式,但结合后续迭代格式来看,应用该式可获得更简洁的表达形式,从而为后续分析提供方便。
1.2 参数迭代求解方法由式(7)~(9)可以看出,参数D由于不存在耦合,因此可直接求解为:

|
(10) |
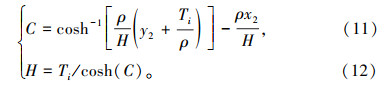
而其余两个参数H和C由于相互耦合均需迭代求解。为此,对式(7)~(9)进一步变形,可得
|
此时,原超越方程组蜕变为显式迭代格式,确定初始索力水平分量H0后,即可依次通过式(11)~(12)反复迭代来获取H及C参数值。其具体做法为将H(i)代入式(11)来获取C(i),进而由式(12)更新第i+1步的迭代值H(i+1),如此反复,直至二者收敛,此即为简单迭代求解方法。该方法具有计算简便、稳定性好、迭代格式直观的优点,即使对于“松索”,也能够稳健收敛。但这一方法主要不足在于方程收敛速度相对较慢,一般需要约10次迭代,H误差才能小于1 kN。这与其他显式迭代格式[7]相比,虽然计算更简单,但由于未考虑索倾角几何关系辅助迭代,因而效率相对较低。
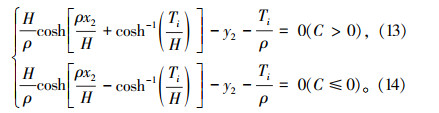
为解决这一问题,对上述迭代方法改进,将式(12)代入式(11),消去参数C,并进一步变形可得
|
对于上述两式,由于斜拉索构件参数C一般大于0(C < 0情形多对应于垂度较大倾角为负的悬索构件),因此主要对式(13)分析。此式为一复杂超越方程,仍需迭代求解。一般而言,上述方程多采用Newton-Raphson方法[8, 14]进行求解,但该方法由于需要对全式求导,计算繁琐,不便于工程应用,因此采用弦截法[15-16]进行求解。其参数选取得当时,算法具有良好的效率和稳定性。记

|
(15) |
则可建立迭代控制方程为:

|
(16) |
式(16)相应的迭代几何示意图如图 2所示。

|
| 图 2 弦截法参数迭代求解示意图 Fig. 2 Illustration of iterative solution of parameters by secant method |
| |
算法具体求解做法为,在第i步依据式(16)求得H(i+1)后,将其与H(i)配合而舍去H(i-1)再次代入式(16)进行第i+1步H(i+2)更新,如此反复,直至相邻两步H结果收敛。由图 2可以看出,弦截法实质上是通过不断截取弦长通过零点来持续更新H(i+1),因而其收敛速度相较于之前简单迭代法大为增加。
对于迭代初始值的选取,其涉及到两个迭代初始量H(0)及H(1)。方便起见,H(0)可依据斜拉索弦长水平夹角确定[17]:
|
(17) |
而对于H(1),由于斜拉索梁端切向倾角一般小于弦长夹角,因而H(1)应较H(0)偏大为宜。根据经验,其取值比H(0)略大时,迭代收敛速度较为良好。此处建议H(1)为:

|
(18) |
当计算收敛后,将H计算结果代入式(11)解得积分常数C,斜拉索受力及线形方程即可完整确定,相应无应力索长、索倾角等计算方程亦可由此进一步导得。对于这一迭代方式,其具有格式简洁、无需求导的便捷特点,因而将其应用于工程实际较为方便。
但值得说明的是,上述快速迭代方法对于斜拉索这种应力水平较高的主动张拉构件一般较为合适,其性能表现良好。而对于部分张紧程度较小、以被动受力为主的悬索构件,该方法则存在一定的求解困难,这主要是由于索端夹角正负号以及迭代初始值的选取问题而导致,需对二者进行相应修正。但一般而言,这类构件与斜拉索受力特性具有一定差异,因而在实际斜拉桥工程中较为少见(对方法适用性影响有限),即使出现,其亦可采用之前导出的式(11)~(12)简单迭代求解方法或依据式(14)形式进行相应迭代处理,该方法对于这类悬索构件计算效果良好,其与快速迭代方法互为补充,可有效解决参数的高精度求解问题。
1.3 斜拉索无应力长度及索力索倾角计算无应力索长Lunstress一般由变形后索长L减去索弹性伸长量ΔL来获得[2]:Lunstress=L-ΔL。
对于L,将式(6)求导变形并积分,可得

|
(19) |
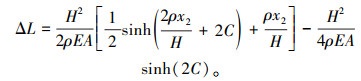
该形式最早由靳明君等[18]导得。而对于ΔL,有

|
(20) |
由于索应变极其微小,故而式(20)近似不致引起较大误差[11]。将沿程索力和式(19)代入,则[14]
|
(21) |
同时,对式(6)求导并结合T与H关系,可得[13]索倾角沿程变化规律
|
(22) |
索力沿程变化规律
|
(23) |
式(22)~(23)是确定索导管制造安装角度以及索力沿程变化规律的重要依据之一。
2 分析方法步骤总结上述公式以及理论分析,斜拉索受力及几何状态获取的关键在于其参数的高效准确求解,各参数确定后,相应状态量即可依次获取。由上述讨论,算法总体的计算步骤可概括如下:
(1) 锚点坐标初始化:确定斜拉索i端(梁端)和j端(塔端)坐标(xi,yi),(xj,yj),并进行坐标平移化简。
(2) 参数迭代求解:确定斜拉索线重度ρ及梁端目标索力Ti,依据式(17)~(18)求得迭代初始值H(0)及H(1)后,利用式(16)开展迭代求解,基于H(i)及H(i+1)更新计算H(i+2),如此循环,直至迭代达到收敛|H(i+2)-H(i+1)| < ε,收敛限ε一般可取为0.01 kN,最后利用式(10)~(11)求出积分常数C和D。
(3) 斜拉索受力状态及几何参数计算:确定斜拉索弹模E及受力总横截面积A,然后利用所求得参数H,C和D分别代入式(6),(19)~(23)以获取斜拉索相应的几何、力学特征及规律。
3 方法验证与工程应用 3.1 方法验证为验证上述方法的正确性,采用有限元方法对其进行验证。不失一般性,斜拉索均采用常用规格和布置形式,其具体参数如表 1所示。
| 索号 | 梁端锚点坐标 | 塔端锚点坐标 | 规格 | 线重度/(kN·m-1) | 梁端索力/kN | |||
| xi/m | yi/m | xj/m | yj/m | |||||
| C1 | 0 | 0 | 20.259 | 43.964 | PES7-121 | 0.389 | 2 392.6 | |
| C2 | -35.100 | -0.175 | 20.166 | 54.201 | PES7-139 | 0.448 | 2 997.8 | |
| C3 | -78.100 | -0.390 | 20.103 | 66.553 | PES7-199 | 0.632 | 3 947.8 | |
| C4 | -122.100 | -0.610 | 20.073 | 80.326 | PES7-241 | 0.761 | 4 984.2 | |
由表 1可知,C1~C4索长度逐渐增加,代表了工程中常见的短索→长索变化,其设计参数具有较好的工程代表性。利用上述参数对斜拉索进行建模,模型采用多连杆模拟(连杆数量满足收敛要求),并考虑大位移效应,斜拉索有限元模型如图 3所示。

|
| 图 3 斜拉索有限元模型 Fig. 3 Finite element model of stay cable |
| |
分别采用所提出方法与有限元方法对上述4根斜拉索进行计算,其中有限元方法采用等效初应变方法迭代求解。二者计算结果如表 2所示。
| 索号 | 计算方法 | 索倾角/(°) | 索力/kN | 无应力索长 Lunstress/m |
线形方程 | 迭代次数 | |||
| θi | θj | Ti | Tj | ||||||
| C1 | 本研究 | 65.17 | 65.53 | 2 392.6 | 2 409.41 | 48.282 5 | y=2 628.41cosh(3.8×10-4x+1.513 4)-6 258.43 | 3 | |
| 有限元 | 65.17 | 65.35 | 2 393.75 | 2 410.56 | 48.282 4 | — | 6 | ||
| 误差/% | 0.0 | 0.3 | 0.0 | 0.0 | 0.0 | — | — | ||
| C2 | 本研究 | 44.3 | 44.77 | 2 997.83 | 3 022.18 | 77.313 2 | y=4 790.41cosh(2.1×10-4x+0.8642)-6 693.24 | 3 | |
| 有限元 | 44.3 | 44.77 | 2 998.47 | 3 022.83 | 77.3132 | — | 6 | ||
| 误差/% | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | — | — | ||
| C3 | 本研究 | 33.83 | 34.73 | 3 947.84 | 3 990.16 | 118.542 7 | y=5 187.78cosh(1.9×10-4x+0.628 1)-6 245.26 | 3 | |
| 有限元 | 33.83 | 34.74 | 3 947.92 | 3 990.24 | 118.542 7 | — | 8 | ||
| 误差/% | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | — | — | ||
| C4 | 本研究 | 29.03 | 30.27 | 4 984.19 | 5 045.82 | 163.157 3 | y=5 723.32cosh(1.7×10-4x+0.529 9)-6 545.74 | 3 | |
| 有限元 | 29.03 | 30.27 | 4 984.64 | 5 046.27 | 163.157 3 | — | 9 | ||
| 误差/% | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | — | — | ||
由表 2可以看出,所提出方法与有限元方法迭代结果高度一致,表明该方法具有较高的计算精度和良好的适用性,其方法正确性由此可得到验证。
进一步对比二者结果可以看出,相对于本研究方法,有限元方法由于需要考虑几何非线性,因此需要多步迭代,且其矩阵较易发生奇异问题;而本研究方法由于从理论解析出发,可在精度与稳定性之间达到兼顾。因此,相对于有限元方法,所提出方法在工程实际应用中具有一定优势,其计算精度及稳定性均令人满意。
为进一步研究算法迭代收敛性,分别考察C1~C4索无应力索长Lunstress及索力水平分量H迭代历程,其每步结果误差如图 4所示。

|
| 图 4 所提出方法迭代误差历程 Fig. 4 Iteration error process of obtained by proposed method |
| |
由图 4可以看出,所有索迭代收敛速度均较快。首次迭代后,其计算值即与最终收敛结果较为接近,最大误差不超过0.02%。第3步迭代后,相应计算结果即与第2步迭代值一致,从而达到收敛。由此,所提出算法具有较为优异的迭代收敛性,其收敛速度较快,这对于降低计算开销具有优势。
3.2 工程应用某大桥为一座3跨双塔双索面混凝土斜拉桥,其主跨328 m,边跨不设置辅助墩。大桥跨径布置为(150+328+150)m=628 m,如图 5所示。其斜拉索采用ϕ7-1670级平行钢丝斜拉索,共计2× (2×22)=88对。索塔采用H形混凝土桥塔,塔高198.9 m;主梁采用双主梁式混凝土板梁,全宽24.1 m。

|
| 图 5 大桥总体布置图 (单位:m) Fig. 5 General layout of bridge (unit: m) |
| |
利用上述方法对斜拉索倾角、索力及无应力索长等信息进行求解,其典型计算结果如表 3所示。
| 索号 | 索倾角/(°) | 索力/kN | 无应力索长 Lunstress/m |
|||
| θi | θj | Ti | Tj | |||
| S22 | 29.03 | 30.27 | 4 984.19 | 5 045.82 | 163.157 3 | |
| S17 | 31.66 | 32.72 | 3 878.2 | 3 923.8 | 135.183 0 | |
| S11 | 36.71 | 37.35 | 3 801.95 | 3 834.1 | 102.056 2 | |
| S6 | 47.17 | 47.60 | 2 873.25 | 2 896.8 | 71.125 5 | |
| S1 | 71.95 | 72.07 | 3 188.35 | 3 209.7 | 42.879 4 | |
| M1 | 71.89 | 72.01 | 3 243.4 | 3 264.6 | 42.737 1 | |
| M6 | 46.91 | 47.32 | 2 967.35 | 2 990.6 | 70.753 8 | |
| M11 | 35.82 | 36.50 | 3 638.15 | 3 669.9 | 102.774 0 | |
| M17 | 29.03 | 30.13 | 4 071.55 | 4 116.5 | 143.576 7 | |
| M22 | 25.70 | 27.17 | 4 696.7 | 4 757.3 | 178.425 7 | |
| 注:索号前缀S代表边跨,M代表中跨。 | ||||||
对比上述计算结果与有限元方法,可得中跨M1~M22斜拉索采用两种方法的无应力索长Lunstress计算误差如图 6所示。

|
| 图 6 中跨斜拉索无应力索长计算误差对比 Fig. 6 Comparison of calculation errors of unstressed cable length of stay cables at mid-span |
| |
由表 3及图 6可以看出:(1)随索号不断增大,梁端与塔端索倾角差异将愈发显著,至中跨最长M22索时,其差异已近1.5°,对于跨度更大的斜拉桥,上述差异将更为显著,这对于拉索锚固装置(如锚箱、锚拉板等)索导管的制造安装倾角确定具有一定影响,宜根据相应结果进行调整。事实上上述差异并不奇怪,根据式(22),斜拉索规格、参数及内力确定后,其倾角变化仅与水平投影坐标x有关,故随索号增大、索长增长,其倾角也将逐渐变化。(2)随索号(索长)逐渐增大,斜拉索几何非线性效应将不断增强[19],而无应力索长计算误差基本不变,其最大误差约0.1 mm,表明该方法可有效适应非线性影响,且给出了索倾角等关键参数信息,为构件在强非线性效应下制造、控制参数的准确确定提供了参考,有利于构件高质量的制造施工和索力控制。上述方法在大桥工程实践中得以成功应用,表明了方法的精确性和工程适用性。
4 结论(1) 基于悬链线理论并结合相应参数的快速迭代算法,建立了斜拉索力学特征的分析求解方法,该方法可准确高效地给出索几何及受力的相应状态量,为结构设计和施工控制提供参考。
(2) 典型数值验算对比结果表明,所提出方法具有较高的计算精度和良好的适用性,相较于有限元方法,其算法稳定性及迭代收敛性均具有一定优势。
(3) 随着斜拉索索长、竖向夹角不断增大,其几何非线性效应将不断增强,准确确定相应构件的制造安装参数至关重要,本研究方法可有效应对上述问题,对不同长度以及倾角的斜拉索,其准确性及适用性均较为良好。
| [1] |
刘士林. 斜拉桥[M]. 北京: 人民交通出版社, 2002. LIU Shi-lin. Cable-stayed Bridge[M]. Beijing: China Communications Press, 2002. |
| [2] |
李乔, 卜一之, 张清华, 等. 大跨度斜拉桥施工全过程几何控制概论与应用[M]. 成都: 西南交通大学出版社, 2009. LI Qiao, BU Yi-zhi, ZHANG Qing-hua, et al. Introduction and Application of Geometric Control throughout the Construction Process of Large-span Cable-stayed Bridges[M]. Chengdu: Southwest Jiaotong University Press, 2009. |
| [3] |
JAYARAMAN H B, KNUDSON W C. A Curved Element for the Analysis of Cable Structures[J].
Computers & Structures, 1981, 14(3/4): 325-333.
|
| [4] |
IRVINE H M. Cable Structures[M].
Cambridge: MIT Press, 1981.
|
| [5] |
张立新, 沈祖炎. 预应力索结构中的索单元数值模型[J]. 空间结构, 2000, 6(2): 18-23. ZHANG Li-xin, SHEN Zu-yan. Numerical Models for Cable Element in Prestressed Cable Structures[J]. Spatial Structures, 2000, 6(2): 18-23. |
| [6] |
方志, 李学有. 斜拉索无应力长度求解及成品索长合理确定[J]. 桥梁建设, 2009(4): 54-58. FANG Zhi, LI Xue-you. Calculation of Unstressed Length and Reasonable[J]. Bridge Construction, 2009(4): 54-58. |
| [7] |
谷利雄, 林桢楷, 王荣辉. 斜拉索无应力索长的实用迭代算法[J]. 中外公路, 2012, 32(1): 149-151. GU Li-xiong, LIN Zhen-kai, WANG Rong-hui. Practical Iterative Algorithm of Stay Cable Unstressed Length[J]. Journal of China & Foreign Highway, 2012, 32(1): 149-151. DOI:10.3969/j.issn.1671-2579.2012.01.034 |
| [8] |
赵雷, 贾少敏, 顾乡. 分幅斜拉桥斜拉索无应力长度的简化计算方法[J]. 重庆交通大学学报(自然科学版), 2014, 33(6): 5-8, 88. ZHAO Lei, JIA Shao-min, GU Xiang. Simplified Calculation Method of Unstressed Length of Cable-stayed Bridge with Separate Twin-decks[J]. Journal of Chongqing Jiaotong University (Natural Sciences), 2014, 33(6): 5-8, 88. |
| [9] |
JUNG M R, MIN D J, ATTARD M M, et al. Unstrained Element Length-based Methods for Determining One Optimized Initial State of Cable-stayed Bridges[J].
International Journal of Engineering Research & Science, 2015, 1(9): 73-95.
|
| [10] |
李强兴. 斜拉索静力解[J]. 桥梁建设, 1996(3): 21-24. LI Qiang-xing. Static Force Solution to Stayed Cables[J]. Bridge Construction, 1996(3): 21-24. |
| [11] |
封洁纯, 戴英樟. 斜拉索无应力长度计算[J]. 公路, 2012(5): 143-147. FENG Jie-chun, DAI Ying-zhang. Calculation of Non-Stress Length of Cable in Cable-stayed Bridge[J]. Highway, 2012(5): 143-147. |
| [12] |
聂建国, 陈必磊, 肖建春. 已知索端预张力或预应力状态索长的索原长求解技术[J]. 工程力学, 2003, 20(6): 81-85. NIE Jian-guo, CHEN Bi-lei, XIAO Jian-chun. Analysis of the Unstressed Length of Catenary with Known Stressed Length or End Tension Force[J]. Engineering Mechanics, 2003, 20(6): 81-85. |
| [13] |
李传习. 斜拉桥柔性拉索力学状态与相似算法[C] //中国公路学会桥梁和结构工程学会一九九九年桥梁学术讨论会. 北京: 人民交通出版社, 2000: 774-782. LI Chuan-xi. Flexible Cable Mechanical State and Similarity Algorithm for Cable-stayed Bridges[C]// 1999 Bridge Symposium of Sub-society of Bridge and Structure of CHS. Beijing: China Communications Press, 2000: 774-782. |
| [14] |
胡媛媛, 黎志谋, 黎小刚, 等. 斜拉桥拉索无应力索长的牛顿迭代解法[J]. 西华大学学报(自然科学版), 2019, 38(2): 92-97. HU Yuan-yuan, LI Zhi-mou, LI Xiao-gang, et al. The Formulas for Solving the Cable-free Cable Length Based on Newton-raphson[J]. Journal of Xihua University (Natural Science Edition), 2019, 38(2): 92-97. |
| [15] |
徐跃良. 数值分析[M]. 成都: 西南交通大学出版社, 2005. XU Yue-liang. Numerical Analysis[M]. Chengdu: Southwest Jiaotong University Press, 2005. |
| [16] |
向锦武, 罗绍湘, 陈鸿天. 悬索结构振动分析的悬链线索元法[J]. 工程力学, 1999, 16(3): 130-134, 43. XIANG Jin-wu, LUO Shao-xiang, CHEN Hong-tian. Catenary element Approach for Cable Structure Vibration Analysis[J]. Engineering Mechanics, 1999, 16(3): 130-134, 43. |
| [17] |
汪峰, 刘沐宇. 斜拉桥无应力索长的精确求解方法[J]. 华中科技大学(自然科学版), 2010, 38(7): 49-52. WANG Feng, LIU Mu-yu. An Accurate Method for Determining Unstressed Cable Length in Long Span Cable Stayed Bridge[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2010, 38(7): 49-52. |
| [18] |
靳明君, 张志国. 悬链线柔索索长的计算[J]. 铁道标准设计, 2004(5): 9-10. JIN Ming-jun, ZHANG Zhi-guo. Computation of the Length of Flexible Cable of Catenary Curve[J]. Railway Standard Design, 2004(5): 9-10. |
| [19] |
WALTHER R, HOURIET B, ISLER W, et al. Cable Stayed Bridges[M].
2nd ed. London: Thomas Telford Limited, 1999.
|