 2023, Vol. 40
2023, Vol. 40扩展功能
文章信息
- 付翔, 王佳, 何宗权, 刘泽轩
- FU Xiang, WANG Jia, HE Zong-quan, LIU Ze-xuan
- 基于差扭控制的轮毂电机车辆防侧翻控制
- Anti-rollover Control of In-wheel Motor Vehicle Based on Differential Torque Control
- 公路交通科技, 2023, 40(3): 237-246
- Journal of Highway and Transportation Research and Denelopment, 2023, 40(3): 237-246
- 10.3969/j.issn.1002-0268.2023.03.028
-
文章历史
- 收稿日期: 2021-11-01




 ,
, 轮毂电机驱动车辆具有各轮驱/制动转矩独立可控、准确可调的优势,日益引起业内关注。当前轮毂电机多用于越野及重型车辆,在道路环境恶劣的野外行驶,需提升车辆在危险工况下的防侧翻稳定性。本研究重点讨论轮毂电机车辆在中高速转向时,如何通过差扭控制实现车辆的防侧翻稳定性。
目前,差扭防侧翻控制主要集中于侧翻指标和控制方法的研究。Li等[1]以改进的预测横向载荷转移率(LTR)作为侧翻指标,基于8自由度非线性车辆模型对预测系统进行了实时计算,达到了良好的侧翻预警目的。郑宏宇等[2]将转向盘角度、车速与侧翻状态关联,设计了动态LTR阈值,该方法减小了整车横向载荷转移率和侧倾角,提升了整车侧翻稳定性。Larish和Li等[3-4]以LTR的导数预测车辆的侧翻状态,提出了具有侧翻状态预测功能的评价指标PLTR,对侧翻危险做出预警。但在实际工程问题中,表征车辆垂向载荷转移的指标LTR计算量小,对车辆侧翻状态的表征准确度较高,且大多以LTR的阈值为固定值,无法自适应工况的动态变化。本研究提出一种动态LTR优化方法,采用LTR及其变化率判定车辆侧翻状态的发展趋势,将定点阈值扩充为区间阈值,并将区间内的动态LTR阈值纳入到侧翻评价中,提高侧翻预测的准确性。
防侧翻控制目前多运用PID控制方法。常规的PID控制器是线性的,参数不能实现实时在线调整,难以应对变化的实际工况[5]。因此研究人员一直在寻求PID控制器参数的自动整定技术,并引入模糊数学思想,将模糊控制与PID控制融合。然而传统模糊PID控制器的模糊论域、控制规则和隶属度函数在整定过程中固定不变,控制效果在一定范围内不理想[6-7]。为此,李洪兴和杨森等[8-9]提出了变论域思想,通过自适应调节伸缩因子,局部加密模糊控制器插值点,使模糊控制器在结构复杂度不变的条件下提高了灵敏度。黄羽韬等[10]为提高船舶控制器性能,引入自适应时变论域模糊PID控制器,实现了在环境力突变情况下的PID参数快速、精确在线调整。吴超等[11]针对Delta型3D打印机喷头运动过程中控制精度低及运动不稳定等现象设计了变论域模糊PID控制器,基于误差实时调整论域范围,使控制系统的超调量减小并加快了响应速度。但目前,国内外将变论域思想用于轮毂电机防侧翻控制的研究仍比较少,且论域变化的合理规则需要进一步的研究。本研究针对防侧翻控制提出一种变论域自适应模糊PID控制算法。以动态LTR作为判定车辆侧翻状态输入,再以变论域模糊PID算法决策目标附加横摆力矩,通过最优车轮选取律结合本研究所提出的4轮力矩链式分配策略,将广义横摆力矩转化为4轮目标力矩。以LTR作为预测和判定车辆侧翻状态目标,以电机驱制动力矩为最终控制目标,间接实现车辆转向时的侧翻稳定性控制,并运用Simulink和CarSim联合仿真平台予以验证。
1 总体架构及模型建立 1.1 总体架构本研究的控制策略主要分为侧翻指标计算层、决策层、控制层。侧翻指标计算层根据式(11)计算实时LTR及其变化率,决策层以方向盘转角和LTR判定车辆转动方向和失稳程度。控制层设计了基于变论域模糊PID算法的附加横摆力矩决策控制器,结合本研究设计的最优车轮选取律,进而提出了4轮力矩链式分配策略。考虑轮毂电机及液压制动系统响应特性,将4轮目标力矩转化为实际力矩并输入到整车模型中。图 1为总体架构图。

|
| 图 1 算法总体架构 Fig. 1 Overall architecture of algorithm |
| |
1.2 模型建立
本研究讨论的主要问题是如何通过控制4轮力矩从而实现车辆行驶过程中的防侧翻控制,因考虑到仅使用电机制动将限制车辆4轮力矩对稳定性控制的能力,特别将轮毂电机和液压制动系统作为实现差扭控制的执行器。本研究的思路是将电机制动作为主要执行系统,将液压系统作为补偿执行系统。
1.2.1 轮毂电机模型轮毂电机选用永磁同步电机(PMSM)作为驱动电机,在已知的PMSM电机模型中,d-q模型是最常用模型。d-q模型是将固定坐标系下的三相交流信号转变为旋转坐标系下的直流量,通过q轴电流来控制PMSM输出转矩[12]。
在d-q坐标系下的PMSM电压方程为:
|
(1) |
式中,ud,uq,id,iq分别为d轴、q轴的电压与电流;RS为定子电阻;ψq和ψd为定子磁链;ω为转子旋转角速度。
磁链方程为:
|
(2) |
式中,Ld和Lq分别为定子绕组在d轴、q轴上的电感;ψr为转子磁链。
转矩方程为:

|
(3) |
式中,pn为电机极对数;T为电磁转矩。
运动方程为:
|
(4) |
式中,T0为输出转矩;J为电机转动惯量;Ω为电机机械角速度;B为转子黏滞摩擦系数。
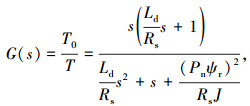
由于表贴式永磁电机Ld=Lq, 并采用id=0的控制方式,对以上公式进行拉普拉斯变换,联立得到用如下传递函数表示电机输出转矩T0和电磁转矩T之间的关系:
|
(5) |
式中,s=σ+jω为1个复数形式的频率,简称复频率,其中实部σ恒为正,虚部jω可为正、负、零。
为了便于工程计算,将电机试验数据拟合,电机外特性曲线如图 2所示。考虑电制动的能量回收、散热等问题,电制动特性相比于驱动特性明显收窄。同时,基于项目中轮毂电机的执行周期20 ms可调,为验证轮毂电机系统的执行响应能力,将台架试验数据拟合出转矩响应图,如图 3~4所示。

|
| 图 2 轮毂电机外特性曲线 Fig. 2 Outer characteristic curves of in-wheel motor |
| |

|
| 图 3 转矩时域响应曲线 Fig. 3 Torque time domain response curves |
| |

|
| 图 4 转矩响应图 Fig. 4 Torque response diagrams |
| |
如图 3~4所示,电机输出转矩可以快速响应目标转矩指令,体现在曲线的一致性和散点的重合度高,图 3曲线较为连续地体现出轮毂电机响应驱/制动的能力。
轮毂电机转矩、转速及功率关系式:
|
(6) |
式中,Tm为电机输出转矩;Tp为电机峰值转矩;Pp为电机峰值功率;ne为电机额定转速;nm为电机峰值转速;n为电机转速。
1.2.2 液压制动系统模型借助制动工况实车试验标定模型中的参数,液压系统的响应特性用一个带延时的惯性环节来描述[13]:
|
(7) |
式中,TBout为液压系统实际输出力矩;TBdes为液压系统期望输出的制动力矩;τd为输出延迟时间常数;τh为液压系统的时间常数。
2 防侧翻控制算法研究 2.1 侧翻评价指标与控制参量选取侧翻指标能够指示车辆侧翻状态,也能根据实际需要作为控制参量。目前研究中,对于一般的非绊倒性侧翻问题,常采用LTR作为指标和控制参数。LTR的定义式如下:
|
(8) |
式中Fzl和Fzr分别为左侧、右侧车轮垂直载荷。
车辆产生侧倾时,由于悬架作用力的变化,车辆的垂直载荷会重新分配。车辆在完全不失稳且无垂直载荷变化时,理论上左右侧车轮垂直载荷相等,LTR数值为0。一旦发生侧倾趋势,车轮与悬架会产生压缩、伸张变形,左右侧车轮与地面接触程度随即改变,垂直载荷必然不相等,此时LTR也将发生变化。因此,左右侧车轮垂直载荷变化情况可表征车轮与地面的接触程度,进而指示车身侧倾程度,有着理论上的合理性。
受硬件计算能力和车辆动力学模型精度的影响,可通过动力学公式重新表达LTR。
假设侧倾中心在地面上,建立车辆模型,如图 5所示。根据力矩平衡可得:

|
| 图 5 车辆侧翻运动模型 Fig. 5 Vehicle rollover motion model |
| |

|
(9) |
式中,ms为车辆的簧上质量;ay为侧向加速度;hg为质心高;φ为车身侧倾角;g为重力加速度。
左右侧车轮垂直载荷之差为:

|
(10) |
式中tw为轮距。
将式(9)~(10)联立,可得:

|
(11) |
式中,m为整车质量,因为汽车簧上质量远大于簧下质量,故ms/m≈1。
由式(8)可知LTR∈[-1, 1]。但经式(11)重新表达后,影响LTR计算的参数分为车辆结构参数和运行参数,此时LTR∉[-1, 1],而是LTR∈[-a, a](a为正实数)。但其代表的意义相同,仍可准确指示车辆侧翻状态。通常悬架动态特性和轮胎弹性变形使车辆的侧翻阈值减小约10%[14]。本研究结合上述理论分析与仿真标定,取LTR控制阈值为±0.8,范围为[-1.5, 1.5]。
2.2 基于LTR速率预测的控制阈值优化方法现有的研究中,LTR一般采用固定阈值[15]。由于车辆作为强非线性系统,在不同工况下车辆特性出现差异,定阈值的LTR难以较为准确涵盖复杂工况。区别于定LTR阈值方法,本研究借鉴PID中微分控制D的作用思想,设计了LTR阈值优化方法,将定点阈值扩充为区间阈值。
当LTR达到预警阈值LTRwarn(小于侧翻阈值LTRthres)后,以若干个周期Tpre的LTR变化率表征侧倾运动是否有超过危险阈值的趋势。当LTR超出预警阈值并继续朝着危险状态发展时,以当前LTR值作为防侧翻控制器输入,及时参与主动控制。由于车辆的侧翻状态和趋势始终是动态过程,以预测性LTR介入时,LTR本身也是动态变化的。为防止实时LTR在控制起点附近震荡导致控制频繁介入退出,本研究设置了安全常量ΔS,当实时LTR处于稳定阈值||LTRt|-ΔS|内,防侧翻控制可以退出。因此,该方法在无明显提升计算量的同时增加了侧翻预测功能。
本研究设定计算周期Tpre=5,预警阈值LTRwarn=0.75,LTRthres=±0.8,安全常量ΔS=0.2。
2.3 变论域模糊PID控制器设计 2.3.1 控制器架构模糊控制一般采用定论域方式,当输入量相对基本论域过大或过小时,模糊规则未充分利用,难以发挥预期的控制效果[16]。结合前文的动态LTR优化方法,采用变论域自适应模糊PID控制算法,图 6为变论域模糊PID控制框图。

|
| 图 6 变论域模糊PID控制框图 Fig. 6 Block diagram of variable universe fuzzy PID control |
| |
整个算法系统以LTR及其变化率为输入,以附加横摆力矩为输出。算法系统包括伸缩因子控制器、模糊控制器、PID控制器。伸缩因子决策器以LTR误差e及误差变化率ec为输入,计算输入输出变量的决策因子。模糊控制器以LTR误差e及误差变化率ec为输入,按照工程经验和标定调整规则,PID控制器3个参数的实时调整量ΔKP,ΔKI,ΔKD整合成优化后的KP,KI,KD:
|
(12) |
式中KP0,KI0,KD0为PID控制器的初始值。
2.3.2 论域伸缩因子计算随着误差e及其变化率ec的变化,论域也随动调整。采用伸缩因子后的论域为:
|
(13) |
式中,Xi和Y分别为变论域后的输入、输出论域;E和U分别为初始输入、输出论域;αi和β分别为输入和输出变量的伸缩因子。
模糊控制器的输入输出变量模糊论域和实际论域关系为:
|
(14) |
式中,Ke和Kec分别为输入LTR误差e及误差变化率ec的量化因子;Ku为输出u的比例因子。变论域方法未改变模糊控制器的结构,通过调整量化因子Ke,Kec和比例因子Ku适应输入变化[17],可实现性好。
伸缩因子决定着论域随动的效果,对变论域模糊PID控制器十分重要。本研究采用输入变量的论域伸缩因子为[18]:
|
(15) |
式中,λ1和λ2为论域调整因子,λ1∈(0, 1),λ2∈(0, 1)主要受制于系统的准确性需求;k1和k2为灵敏度系数,k1>0, k2>0且决定了控制系统的灵敏性。k1和k2越大,系统响应越快。根据经验和多次试验,选取伸缩因子为α(e)=1-0.5exp(-0.5e2)、α(ec)=1-0.5exp[-0.5(ec)2]。
一般常用输出论域伸缩因子的函数为[16]:
|
(16) |
式中,TI为比例常数;Pi为输入变量权重常数; ei(τ)为误差;β(0)为输出论域伸缩因子的初值。
函数标定原则为:误差e增大时,Kp和Kd的伸缩因子应适当增大,Ki的伸缩因子应适当减小。故设计KP的伸缩因子βP=2|e|、KI的伸缩因子βI=1/(|e|+0.7)。图 7为论域伸缩示意图。

|
| 图 7 论域伸缩示意图 Fig. 7 Schematic diagram of universe expansion |
| |
2.3.3 模糊PID控制器
本研究选用PID控制器,采用鱼钩工况为试验工况,初始车速为60 km/h,经不断试凑调参,PID控制器的初始值为KI0=90,KP0=0,KD0=0。模糊控制采用双输入双输出结构,输入为LTR误差e及误差变化率ec,输出为PID控制器参数的实时调整量ΔKp,ΔKI,ΔKD。误差e的基本论域为[-1.5, 1.5];误差变化率ec基本论域为[-60, 60];ΔKp和ΔKI的基本论域分别为[-180, 180],[-30, 30]。输入输出论域都取为{-6, -5, -4, -3, -2, -1, 0,1, 2, 3, 4, 5, 6},定义模糊子集为{NB, NM, NS, ZE, PS, PM, PB},分属于模糊集合{负大,负中,负小,零,正小,正中,正大},模糊规则如表 1和表 2。由式(14),可得量化因子为Ke=4,Kec=0.1。比例因子为Kukp=30,Kuki=5。
| ΔKp | EC | |||||||
| NB | NM | NS | ZE | PS | PM | PB | ||
| E | NB | PB | PB | PB | PB | PB | PB | PB |
| NM | PB | PB | PM | PM | PM | PM | PM | |
| NS | PM | PM | PS | PS | PS | PM | PM | |
| ZE | PS | PS | ZE | ZE | ZE | ZE | PS | |
| PS | PM | PM | PS | PS | PS | PM | PM | |
| PM | PB | PB | PM | PM | PM | PB | PB | |
| PB | PB | PB | PB | PB | PB | PB | PB | |
| ΔKI | EC | |||||||
| NB | NM | NS | ZE | PS | PM | PB | ||
| E | NB | PS | PS | PS | PS | PS | PS | PS |
| NM | PS | PS | ZE | ZE | ZE | PS | PS | |
| NS | PM | PM | PB | PB | PB | PM | PM | |
| ZE | PB | PB | PB | PB | PB | PB | PB | |
| PS | PM | PM | PB | PB | PB | PM | PM | |
| PM | PS | PS | PM | PM | PM | PS | PS | |
| PB | PS | PS | PS | PS | PS | PS | PS | |
在不影响控制效果的前提下,为便于计算,输入输出选用相同的三角型隶属度函数。模糊规则为:当偏差|e|较大时,为了使控制量快速跟随理想值,应适当增大Kp,减小KI,同时限制KD;当|e|和|ec|的值为中等大小时,为兼顾系统响应速度、系统超调量和稳定性,应适当减小KI,并取适中的Kp和KD;当|e|较小时,为保证系统具有良好的稳态性能,可适当减小Kp,增大KI和KD。
2.4 最优车轮选取律及4轮力矩链式分配方法合理的车轮选取规则和4轮转矩分配是保证差扭控制防侧翻效果的关键环节。本研究采用一侧车轮制动、一侧车轮驱动的方式进行差扭防侧翻控制。表 3为设计的最优车轮选取律。FL,FR,RL,RR分别为左前轮、右前轮、左后轮、右后轮;1, 2, 3, 4为车轮控制优先级,1为最高优先级;符号“+”为驱动;“-”为制动。
| 选取依据 | 车轮选取结果 | |
| δ>0 | LTR≥LTRthres | FL(1-),FR(2+),RL(3-),RR(4+) |
| LTR≤-LTRthres | FL(2+),FR(1-),RL(4+),RR(3-) | |
| δ < 0 | LTR≥LTRthres | FL(1-),FR(2+),RL(3-),RR(4+) |
| LTR≤-LTRthres | FL(2+),FR(1-),RL(4+),RR(3-) | |
表 3中δ为前轮转角。依据最优车轮选取律,确定了在不同侧翻工况下4轮的驱/制动模式。在此基础上,配合实施4轮转矩分配策略,提升优势车轮的作用权重,可以进一步增强侧翻抑制效果。
考虑不同车轮对横摆运动的影响能力存在差异,设计了4轮转矩链式分配算法。算法思路是:将目标附加横摆力矩分解为4轮力矩,优先分配对侧翻抑制效果最优的前轴车轮,其次将力矩分配为效果次优的后轴车轮。
具体地,依据传感信息采集、滤波处理侧向加速度、方向盘转角等信息,利用前文算法决策最优车轮选取规则和附加横摆力矩。在此基础上,依据最优车轮选取律来确定4轮的驱/制动模式和优先级。然后依次判定外前轮制动能力、内前轮驱动能力、外后轮制动能力、内后轮驱动能力的叠加是否满足目标附加横摆力矩需求。
需要说明的是,电动轮驱/制动力Fi为:

|
(17) |
式中,εi为附着力安全系数,由标定得到;i=1, 2, 3, 4分别为左前、右前、左后、右后车轮;μ为路面附着系数;Tmdi和Tmbi分别为实时转速下电机最大驱动、制动力矩,可由图 2电机外特性得到;ir为行星减速器减速比;R为车轮滚动半径;THyi为液压制动力矩。
同时,在4轮力矩链式分配算法中,针对4轮垂向力估计不够精确问题,设计了附着力安全利用系数εk:
|
(18) |
式中,ay, t为实时的横向加速度;ayth为横向加速度阈值,本研究取0.6g;λk和bk均为系数,由标定得到;k=1, 2, 3, 4分别为外前轮、内前轮、外后轮、内后轮。
电机和液压系统的制动力矩和响应方式均不同,需要考虑二者的协调控制。借助4轮力矩决策出4轮电制动最大力矩,通过下式来判断有无液压制动系统的介入:
|
(19) |
式中,Tmb_imax为决策出的电机制动力矩;Txi为4轮电制动最大力矩。
当决策出的电机制动力矩满足4轮电制动最大力矩需求时,仅有电机单独工作;当决策出的电机制动力矩不满足4轮电制动最大力矩需求时,液压制动系统进行制动力补偿。
3 离线仿真分析 3.1 基于Simulink/CarSim的仿真模型搭建为了验证本研究控制方法对防侧翻控制的有效性,借助CarSim/Simulink平台,在典型工况下进行联合仿真。为保证仿真数据的可信度,采用课题项目中的实车数据,基于台架试验的轮毂电机模型,在CarSim中通过参数自定义设置方式设置车辆参数,仿真的整车及轮毂电机参数如表 4所示。
| 参数 | 数值 | 参数 | 数值 | |
| 整车质量/kg | 5 400 | 单电机峰值功率/kW | 80 | |
| 整车横摆转动惯量/(kg·m2) | 10 080 | 单电机峰值转矩/(N·m) | 1 650 | |
| 整车迎风面积/m2 | 3.7 | 单电机标定最大转矩/(N·m) | 1 000 | |
| 质心高度/m | 0.8 | 单电机峰值转速/(r·m-1) | 4 500 | |
| 轴距/m | 3.5 | 轮边减速器减速比 | 5.0 | |
| 轮距/m | 2.05 | 轮胎滚动半径/m | 0.415 | |
| 质心至前轴距离/m | 1.8 | 转动惯量/(kg·m2) | 18 |
3.2 鱼钩工况仿真试验分析
本研究针对的轮毂电机车辆主要追求在复杂道路环境下的高机动性和复杂交通情况下的操纵性。相对于一般乘用车,越野车辆对最高车速、舒适性的要求相对宽泛。鱼钩工况是车辆侧翻工况中最复杂恶劣的工况,能够充分检验车辆的抗侧翻性能。根据所述车辆的实际用途和设计需求,设置初始试验车速为80 km/h,路面附着系数为0.9,驾驶员输入的方向盘转角如图 8所示,仿真结果如图 9所示。

|
| 图 8 方向盘转角及角速度 Fig. 8 Angle and angular velocity of steering wheel |
| |

|
| 图 9 鱼钩工况仿真结果 Fig. 9 Simulation result of fishing hook conditions |
| |
由图 9(a)可知,车辆无主动控制时,LTR大幅度超出了危险界限,车辆处于极度侧倾、侧滑的危险中,应极力避免。采用差扭控制的方式能较好地提升车辆的抗侧倾性能,防侧翻控制的LTR被控制在-0.79~0.77,相比无控制时LTR明显收窄,取得了良好的防侧翻效果。从表征车身侧倾姿态的图 9(b)~(c)可知,车辆在无主动控制时侧倾角速度震荡明显,峰值侧倾角速度达到55.7(°)/s,峰值侧倾角达到7.65°,处于危险侧倾状态; 而在差扭防侧翻控制作用下,侧倾角速度的峰值降低到20.2(°)/s,同时峰值侧倾角有明显改善,降至4.55°,减少了约26.3%,极大改善了车辆侧倾稳定性。防侧翻控制效果直观体现在行驶轨迹图 9(d)上,无主动控制时车辆侧滑严重,失去了对转向操纵和路径的跟踪能力,差扭防侧翻控制能够使车辆趋于不足转向。
3.3 双移线工况仿真试验分析双移线工况模拟了超车、紧急避障等实际工况,路面特征复杂多样和行驶工况动态变化是测试、检验车辆性能的常用工况。仿真初始车速为90 km/h,路面附着系数为0.8,驾驶员模型采用CarSim内嵌的预瞄-跟踪模型。图 10为仿真结果。

|
| 图 10 双移线工况仿真结果 Fig. 10 Simulation result of double shifting conditions |
| |
从图 10(a)可知,无主动控制时的LTR逼近极限值,侧翻可能性极大。差扭防侧翻控制后的LTR范围明显变窄,约为-0.76~0.78,范围缩小了近39.4%,可见差扭防侧翻控制有效降低了LTR的范围,使得车辆的4轮垂向载荷差异不易发展增大。从表征车身侧倾姿态的图 10(b)~(c)可知,车辆在无主动控制时峰值侧倾角达到9.78°,且侧倾角速度震荡明显,峰值侧倾角速度达到42.8(°)/s,处于危险侧倾状态。在差扭防侧翻控制作用下,车身侧倾角能与实际转向引起的侧倾方向一致,说明车辆能够跟随转向操纵。但是差扭防侧翻控制不直接调整车身侧倾姿态,因而对车身侧倾角的控制能力较弱,其峰值侧倾角达到-7.28°,峰值侧倾角速度降为原来的一半,且差扭防侧翻控制的侧倾角速度波动次数和幅值明显减小。
4 结论本研究以动态LTR及其变化率作为侧翻评价指标和控制目标,提出了变论域模糊自适应PID控制方法,以此决策防侧倾控制时各个车轮的力矩分配,并通过Simulink与CarSim的联合仿真验证了轮毂电机车辆在鱼钩工况和双移线工况下差扭防侧翻控制的有效性。结果表明,本研究差扭控制防侧翻系统相较于无主动控制系统在防侧翻控制上有较大的改善。具体体现在LTR范围降低约39.4%,鱼钩工况和双移线工况下差扭控制防侧翻系统下的侧倾角速度相较于无主动控制减小了42.8%和43.2%。通过试验结果和分析看出,本研究控制算法可以较好地改善车辆的侧倾稳定性,从而有效地提高车辆的行驶安全性。
| [1] |
LI H Q, ZHAO Y Q, WANG H Y, et al. Design of an Improved Predictive LTR for Rollover Warning Systems[J].
Journal of the Brazilian Society of Mechanical Sciences and Engineering, 2017, 39(10): 3779-3791.
DOI:10.1007/s40430-017-0796-7 |
| [2] |
郑宏宇, 杨硕, 文良浒, 等. 基于电控制动系统的客车防侧翻控制策略[J]. 吉林大学学报(工学版), 2016, 46(4): 1038-1043. ZHENG Hong-yu, YANG Shuo, WEN Liang-hu, et al. Anti-rollover Control Strategy of Bus Based on Electronically Controlled Braking System[J]. Journal of Jilin University (Engineering and Technology Edition), 2016, 46(4): 1038-1043. DOI:10.13229/j.cnki.jdxbgxb201604004 |
| [3] |
LARISH C, PIYABONGKARN D, TSOURAPAS V, et al. A New Predictive Lateral Load Transfer Ratio for Rollover Prevention Systems[J].
IEEE Transactions on Vehicular Technology, 2013, 62(7): 2928-2936.
DOI:10.1109/TVT.2013.2252930 |
| [4] |
LI H Q, ZHAO Y Q, WANG H Y, et al. Design of an Improved Predictive LTR for Rollover Warning Systems[J].
Journal of the Brazilian Society of Mechanical Sciences and Engineering, 2017, 39: 3779-3791.
DOI:10.1007/s40430-017-0796-7-7 |
| [5] |
张嫦利. PID参数对动力定位系统定位精度的影响[J]. 实验室研究与探索, 2015, 34(3): 8-12. ZHANG Chang-li. Effects of Selection of PID Coefficients on Positioning Accuracy of DP System[J]. Research and Exploration in Laboratory, 2015, 34(3): 8-12. DOI:10.3969/j.issn.1006-7167.2015.03.003 |
| [6] |
李强. 浅析船舶动力定位系统的控制技术[J]. 中国水运(下半月), 2014, 14(9): 160-16. LI Qiang. Analysis on Control Technology of Ship Dynamic Positioning System[J]. China Water Transport, 2014, 14(9): 160-161. |
| [7] |
陈珊珊. 模糊PID控制在船舶动力定位系统中的应用[J]. 舰船科学技术, 2015, 37(3): 119-121, 129. CHEN Shan-shan. Research on the Application of Fuzzy PID Control in the Ship Dynamic Positioning System[J]. Ship Science and Technology, 2015, 37(3): 119-121, 129. DOI:10.3404/j.issn.1672-7649.2015.03.025 |
| [8] |
李洪兴. 变论域自适应模糊控制器[J]. 中国科学E辑, 1999, 29(1): 32. LI Hong-xing. Variable Universe Adaptive Fuzzy Controller[J]. Science in China, Ser. E, 1999, 29(1): 32. |
| [9] |
杨森, 杨杰, 张均东, 等. 基于变论域模糊PID的船舶柴油发电机调速系统[J]. 中国航海, 2016, 39(1): 17-21. YANG Sen, YANG Jie, ZHANG Jun-dong, et al. Rotation Speed Control of Marine Diesel Engine Generator Based on Variable Universe Fuzzy-PID[J]. Navigation of China, 2016, 39(1): 17-21. DOI:10.3969/j.issn.1000-4653.2016.01.005 |
| [10] |
黄羽韬, 徐海祥, 余文曌, 等. 动力定位自适应变论域模糊PID控制器设计[J]. 武汉理工大学学报(交通科学与工程版), 2020, 44(2): 311-315. HUANG Yu-tao, XU Hai-xiang, YU Wen-zhao, et al. Design of Dynamic Positioning Adaptive Variable Universe Fuzzy PID Controller[J]. Journal of Wuhan University of Technology (Transportation Science and Engineering Edition), 2020, 44(2): 311-315. |
| [11] |
吴超, 段倩倩, 郝润芳. 基于变论域模糊PID的3D打印机喷头运动控制[J]. 信息技术, 2020, 44(9): 21-26, 32. WU Chao, DUAN Qian-qian, HAO Run-fang. 3D Printer Nozzle Motion Control Based on Variable Universe Fuzzy PID Control Algorithm[J]. Information Technology, 2020, 44(9): 21-26, 32. DOI:10.3969/j.issn.1674-2117.2020.09.008 |
| [12] |
张超, 张入通, 娄亚军, 等. 基于工程设计法的永磁同步电机转矩控制[J]. 制造业自动化, 2020, 42(4): 130-133. ZHANG Chao, ZHANG Ru-tong, LOU Ya-jun, et al. Torque Control of Permanent Magnet Synchronous Motor Based Onengineering Design Method[J]. Manufacturing Automation, 2020, 42(4): 130-133. DOI:10.3969/j.issn.1009-0134.2020.04.031 |
| [13] |
丁凌志. 基于电液协调控制的轮毂电机电动汽车稳定性控制研究[D]. 重庆: 重庆理工大学, 2020. DING Ling-zhi. Research on Stability Control of In-wheel Motor Electric Vehicle Based on Electro-hydraulic Coordinated Control[D]. Chongqing: Chongqing University of Technology, 2020. |
| [14] |
张志达, 李韶华, 刘星, 等. 全轮转向多轴车辆性能分析及侧翻前馈预警研究[J]. 北京理工大学学报, 2018, 38(A01): 142-146. ZHANG Zhi-da, LI Shao-hua, LIU Xing, et al. Performance Analysis and Rollover Feed-forward Warning for Multi-axle Vehicle with All Wheel Steering[J]. Journal of Beijing Institute of Technology, 2018, 38(A01): 142-146. |
| [15] |
金智林, 梁为何, 赵万忠. 汽车多增益融合线控转向传动比及防侧翻控制[J]. 机械工程学报, 2018, 38(10): 172-180. JIN Zhi-lin, LIANG Wei-he, ZHAO Wan-zhong. Multi-gains Ratio of Steer-by-wire System and Anti-rollover Control for Vehicle[J]. Journal of Mechanical Engineering, 2018, 38(A01): 142-146. |
| [16] |
张志勇, 唐磊, 郝威, 等. 轮毂驱动电动汽车差动助力转向变论域模糊PID控制[J]. 汽车安全与节能学报, 2019, 10(2): 169-177. ZHANG Zhi-yong, TANG Lei, HAO Wei, et al. Differential Power Steering Control for In-wheel Motored Electric Vehicle Based on Variable Universe Fuzzy PID[J]. Journal of Automotive Safety and Energy, 2019, 10(2): 169-177. |
| [17] |
时培成, 徐增伟, 王锁, 等. 变论域自适应模糊PID主动悬架控制研究[J]. 机械科学与技术, 2019, 38(5): 713-720. SHI Pei-cheng, XU Zeng-wei, WANG Suo, et al. Variable Universe Adaptive Fuzzy PID Control of Active Suspension[J]. Mechanical Science and Technology for Aerospace Engineering, 2019, 38(5): 713-720. |
| [18] |
柳江, 林晨, 叶明, 等. 馈能悬架变论域模糊控制[J]. 上海交通大学学报, 2016, 50(8): 1139-1143. LIU Jiang, LIN Chen, YE Ming, et al. Variable Universe Fuzzy Control of Energy-regenerative Suspension[J]. Journal of Shanghai Jiaotong University, 2016, 50(8): 1139-1143. |