 2023, Vol. 40
2023, Vol. 40扩展功能
文章信息
- 唐俊义, 冯麟, 周志祥, 郑佳艳, 余忠儒
- TANG Jun-yi, FENG Lin, ZHOU Zhi-xiang, ZHENG Jia-yan, YU Zhong-ru
- 基于单目视觉测量技术的车辆尺寸识别方法
- A Method for Recognizing Vehicle Dimensions Based on Monocular Vision Measurement Technology
- 公路交通科技, 2023, 40(3): 228-236
- Journal of Highway and Transportation Research and Denelopment, 2023, 40(3): 228-236
- 10.3969/j.issn.1002-0268.2023.03.027
-
文章历史
- 收稿日期: 2021-04-01




 ,
, 2. 深圳大学 土木与交通工程学院,广东 深圳 518060
2. School of Civil and Transportation Engineering, Shenzhen University, Shenzhen Guangdong 518060, China
近年来,我国汽车保有量不断上升,在满足人们出行需求的同时,给道路交通管理带来巨大挑战,为有效辨认超限超载车辆,避免车辆超限超载现象,进而降低安全事故隐患,开发一种先进、可靠且成本较低的车辆荷载识别技术实现车辆荷载的等效估算,可有效提升公路交通系统的监控性能与车辆管理水平[1]。
现有车载分类只是按照车辆的轴距进行划分[2],相较于以车辆尺寸为分类标准一定程度上限制了其荷载识别效率。此外,现有基于机器视觉与深度学习的车型识别技术虽然取得了一定程度的突破,但仍需要根据实际应用与各算法特点选择合适的识别方法且识别精度和效率难以同时满足[3]。因此,亟待一种基于机器视觉的测定方法以期快速准确测定车辆尺寸不仅可作为有效信息来源,也能够加快我国智能交通系统(ITS)的发展,符合目前大数据技术的发展趋势[4-6]。
汽车外轮廓尺寸的获取方法主要经历了人工检测、机器视觉识别[7]、激光测距仪测量[8]以及激光光幕测量[9]等技术。相较于人工检测时存在的精度不够、费时、费力等问题,光幕检测技术与激光测距检测仪等主动式传感器虽然能够准确获取车辆尺寸信息,但因其造价昂贵,扫描范围与速度有限且易受到周围环境因素干扰等缺点限制了此类方法的应用[10-11]。以计算机视觉为代表的非接触式传感器测量方法不仅有效解决上述问题,且后期图像处理方法柔性较大,是目前尺寸测量领域的研究热点[12-13]。张斌[14]基于双目视觉技术,对目标车辆采用外轮廓模型拼接以得到其尺寸信息,但是该方法运算过程复杂且试验数据不足,无法满足实际车辆检测应用需求。闻江[15]利用图像特征点匹配方法从车辆运动过程的序列图像中得到完整的车辆图像进而实现尺寸测量,但该方法只适用于车速较低的情况。王鹏等[16]提出了一种基于改进尺度不变性的双目视觉车辆外轮廓尺寸测量方法,得到的结果绝对误差小于150 mm,但是图像边缘信息由于弱纹理影像存在一定误差,算法仍需进一步改进。由此可以看出目前运用机器视觉获取车辆外轮廓尺寸的研究主要是基于双目视觉的车辆三维模型的重建,虽然通过图像特征点的匹配算法与人工相机标定可以为车辆尺寸检测提供了可靠的累计长度,但该算法过于复杂,在目前的硬件条件下无法进行实时检测,且目标车辆一旦处于高速阶段,误差将会更大。
单目视觉测量相较于双目视觉由于减少了相机个数,图像信息处理量与计算量大幅降低,在车辆车距中有着较为广泛的应用,但是在车辆尺寸检测中的应用相对较少[17]。基于此,针对目前车辆外轮廓尺寸识别中存在的识别方法复杂、测量精度低等问题,本研究依据非线性成像模型,提出了基于单目视觉测量技术的车辆尺寸识别方法。通过相机参数建立图像纵向单个像素点与实际长度的对应关系(即像素尺度因子),进而构建车辆尺寸识别模型,开展了以某固定尺寸的模型车室内试验与实测应用研究,依据数字图像处理方法获取车头车尾特征点的纵向坐标后,应用该模型计算得到目标车辆的实际车长。该测量方法的硬件成本低,几乎不占用场地,测量系统性能稳定可靠。
1 单目视觉测量模型 1.1 车长计算理论在道路交通监测过程中,监控摄像头以一定的俯仰角度对目标道路区域进行拍摄,从小孔成像理论中可知,俯仰角的存在使得纵向像素尺度因子所对应的实际长度并不是一个定值,越靠近摄像机光心区域的单个像素点所对应的长度越小,反之越大,最终呈现“近大远小”分布。
为探寻车道区域纵向长度的求解方法,基于小孔成像原理建立了关于监控摄像头与车道区域的单目视觉测量模型。如图 1所示,O为摄影相机光心,龙门架OA垂直于路面AC于点A,B为摄影相机实际中拍摄到的路面区域BC上与摄影相机纵向距离最近的点(近视场点),同时此点在图像中对应点B″(纵向像素坐标为v0),点C为路面上与摄影相机纵向距离最远的点(远视场点),其在图像中对应点为B″(纵向像素坐标为vm)。车道区域纵向长度BC按一定比例投影在相机感光元件(CCD)上,其长度计算公式为:

|
| 图 1 单目视觉测量模型 Fig. 1 Monocular vision measurement model |
| |

|
(1) |

|
(2) |
|
(3) |
式中,h为摄影相机光心到路面的纵向高度;d0为底边近视场点B到摄影相机纵向距离;α为摄影相机拍摄时的俯仰角度;β为相机内参角(相机视域角);dAC为龙门架到相机远视场点C的距离;d为车道区域纵向长度(即BC)。
其相机视域角求解模型如图 2所示。近远视场线与感光元件竖向中心线构成了一个等腰三角形,由于光轴垂直于该三角形底边上,利用几何关系得:

|
| 图 2 摄影相机视域角求解模型 Fig. 2 Camera view field angle solution model |
| |
|
(4) |
式中,b为感光元件的宽度,可从相机结构参数中获取;f为光心到感光元件的长度(即焦距)。
将相机暗箱(即三角形OB″C″)以O为对称中心投影成OB′C′,同时为求解图像纵向像素尺度因子,将图像纵向长度B′C′按照分辨率大小均匀分成m份,其底边对应的交点到相机的纵向距离定义为do,d1,dm,由此建立了纵向像素尺度因子计算模型,如图 3所示。

|
| 图 3 纵向像素尺度因子计算模型 Fig. 3 Longitudinal pixel scale factor calculation model |
| |
根据前文所述底边BC长度的求解方式,假定图像中某像素点P′的纵向像素坐标为vP,其对应点P到B点的长度dBP可按式(5)~(7)计算,即:
|
(5) |
|
(6) |
|
(7) |
式中,dP为像素点为P时底边上P点到A点的长度;m为图像纵向像素点个数。
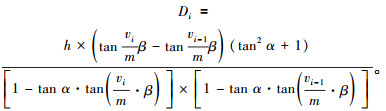
对式(7)进行微分即可得到单个像素点对应的实际长度,即像素尺度因子(Di),如式(8)所示:

|
(8) |
式中di与di-1分别为纵向随机点i与其相邻点到相机的纵向距离。
依据式(7)可展开得:
|
(9) |
将式(9)代入式(8)可得:

|
(10) |
式中,vi为纵向随机点i的像素坐标;vi-1为其相邻点坐标。
对上式进行化简后可得:
|
(11) |
为减小相机参数因测量误差所带来的影响,测量底边AC总长作为先验知识,以式(1)~(3)作为控制方程,试算底边总长达到调整参数的目的。
像素尺度因子描述了图像中单位像素点与物体在三维空间中的实际长度关系,为车长计算提供了理论依据,从式(11)中可以看出,像素尺度因子除了和相机内外参数有关之外,还与物点的纵向像素坐标有关,因此车长计算的核心问题就是获取图像像素尺度因子与目标车辆特征点的纵向像素坐标。
1.2 车长计算步骤根据前文所述,目标车辆长度计算还与车辆前后点位的像素坐标有关,利用单目视觉像素尺度因子求解模型几何关系可知,图像中确定目标车辆车头与车尾处的目标点后,其连线在三维世界中应与车道线平行,进而也平行于图像坐标系的纵轴。由于该轴在透视变换过程中不会发生左右偏移,因此可将车辆投影到该轴进行计算,即头尾目标点像素距离即代表实际车长。本研究采用的特征点坐标获取方法首先基于图像轮廓线提取算法得到图像轮廓线并过滤其中的无效数据得到目标区域的灰度信息,此时目标车辆特征信息已较为容易识别,之后结合基于高斯混合模型的背景差分目标检测方法[18],以车头与车尾为界形成目标点位候选框区域,最后采用RGB色度空间像素定位算法获取框选区域边缘目标点位纵向坐标。
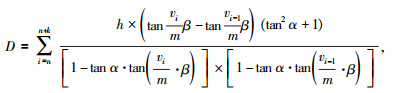
在获得特征点像素坐标后(假设分别为vn,vn+k, 且vn+k>vn),目标车辆的长度可用数列求和表示,即
|
(12) |
式中D为目标车辆的实际长度。
2 试验验证 2.1 设备与布置为进一步分析验证本研究提出的计算方法,开展了基于影像数据的车辆尺寸识别与对比试验研究,以3个不同尺寸模型车为研究对象,参考交通监测系统,利用摄影相机与三脚架布置于试验桥右侧端头以模拟真实交通中监控摄像头,同时通过三脚架架设摄像机于桥梁立面以获取车辆侧面影像数据,结合文献[15]所用方法开展尺寸识别对比试验。试验过程中,利用固定俯视角情况下定焦镜头及摄像机各参数保持不变等特点,分别获取不同模型车车头至试验梁桥右侧端点距离为1.5,2.0,2.5,3.0,3.5 m与4.0 m的序列图像。
试验梁路面、设备安装以及测点布置如图 4所示。试验梁路面为一简支梁桥面,考虑到试验过程中模型车易行驶出桥面,桥梁两侧黏接有槽型钢条以规范车辆行驶路线。3辆模型车参数(长×宽×高)分别为300 mm×65 mm×35 mm,520 mm×180 mm×270 mm,420 mm×90 mm×120 mm,端头处设有牵引电机为模型车提供动力。相机视域内设置6个测试点,测点间距固定为500 mm,每个测点处均贴有标记。

|
| 图 4 试验布置示意图 Fig. 4 Schematic diagram of test arrangement |
| |
摄影设备主要由3部分组成,即摄影相机、摄像机以及三角支架工作平台。摄影相机与摄像机为模型车移动时的序列图像获取工具,铅垂线顶端紧贴相机光心以便进行相机外参数测量,三角支架工作平台作为摄影相机的固定平台,具备良好的稳定性,减少拍摄过程中相机抖动对图片采集的影响。拍摄期间,摄影相机固定在主梁端头附近并以一定俯仰角度进行图像采集。为防止手动按快门导致相机振动,采用电脑控制进行拍摄。
2.2 参数与数据基于前文所述,像素尺度因子与相机参数有关,因此计算像素尺度因子前需进行相机标定。相机与摄像机的内参数标定结果如表 1~2所示。
| 类型 | 参数 |
| 相机型号 | Canon-EOS 5DsR |
| CCD尺寸/mm | 36×24 |
| 像幅大小 | 8 688×5 792 |
| 焦距/mm | 24 |
| 镜头 | Canon EF24-70 mm f /2.8LⅡUSM |
| 外形尺寸(宽×高×厚)/mm | 约152.0×116.4×76.4 |
| 类型 | 参数 |
| 摄像机型号 | Sony-FDR-AX700 4K HDR |
| CCD尺寸/mm | 13.2×8.8 |
| 像幅大小 | 5 024×2 824 |
| 焦距/mm | 35 |
| 镜头 | Vario-Sonnar T*镜头 |
| 外形尺寸(宽×高×厚)/mm | 约116×89.5×196.5 |
进行相机外参数测量时,待铅垂线悬停后即可测得摄影相机光心高度h,同时以该垂线与桥面交点为固定点测量底边近视场点、远视场点到相机的纵向距离d0与d′m,采用前文所述的试算方法进行优化后确定了计算参数,结果如表 3所示。
| h/mm | d0/mm | α/(°) | B/(°) | dm/mm | d′m/mm | |dm-d′m|/mm | S/d′m/% |
| 655 | 360 | 28.8 | 53.1 | 4 242 | 4 336 | 94 | 2.17 |
将修正后的模型参数代入式(9)中即可获得底边上任意点到相机的纵向距离,考虑到第2,3辆模型车高度相对于相机光心高度不可忽略,因此依据车辆高度信息调整模型车尺寸测量参考平面得到相机光心修正高度h′,其具体为:工况1 655 mm、工况2 415 mm、工况3 545 mm。将计算高度代入式(11)后得到3种工况下的像素尺度因子。
计算结果如图 5所示。两种曲线的增长趋势符合前文所述图像由于俯仰角度影响像素分布呈现“近大远小”的特点,进一步验证了该算法的可靠性,使得像素尺度因子函数能切合实际地反映物体在图像中纵轴的投影长度变化,为后期车辆尺寸计算提供了理论基础。

|
| 图 5 车长计算曲线 Fig. 5 Calculation curves of vehicle length |
| |
原始图像进行边缘轮廓线提取后,基于前文所述目标点提取方法对该点进行识别并获取其纵向坐标;对比试验中采用SIFT与SURF算法分别对运动序列图像进行配准与拼接。
2.3 结果与分析得到模型车车头与车尾的纵向像素坐标后,利用前文所述方法,将坐标值代入式(12)得到各测点试验车的计算长度,结果汇入表 4,并绘制3种工况下全桥测点的误差分析图,如图 6所示。3种工况下本研究算法的平均误差5.3%,且越靠近中间测点,误差越小,这主要是由于相机的成像特点,图像上远距离像素尺度因子较大造成车长识别误差增大。另外,虽然本研究方法的相较于另外两种方法在精度上略有下降,但针对交通监测系统,误差仍满足车辆等效荷载简化方法研究中车辆尺寸的识别精度要求,且部分测点的精度也接近对比试验两种方法,这也进一步验证了本研究方法测量的有效性。
| 工况 | 测点 | 真实值/mm | 纵向像素坐标 | 计算值/mm | 相对误差/% | |||||
| 本研究方法 | SIFT | SURF | 本研究方法 | SIFT | SURF | |||||
| 工况1 | 1 | 300 | (5 274;5 409) | 319 | 293 | 289 | 6.3 | 2.3 | 3.7 | |
| 2 | 300 | (5 014;5 194) | 307 | 294 | 290 | 2.3 | 2 | 3.3 | ||
| 3 | 300 | (4 826;5 040) | 298 | 311 | 291 | 1 | 3.7 | 3 | ||
| 4 | 300 | (3 879;4 325) | 295 | 310 | 313 | 1.7 | 3.3 | 4.3 | ||
| 5 | 300 | (1 788;2 894) | 288 | 308 | 312 | 4 | 2.7 | 4 | ||
| 6 | 300 | (487;2 009) | 278 | 291 | 312 | 7.3 | 3 | 4 | ||
| 工况2 | 1 | 520 | (5 531;5 760) | 575 | 508 | 536 | 9.6 | 2.3 | 3.1 | |
| 2 | 520 | (5 351;5 631) | 534 | 503 | 535 | 2.7 | 3.3 | 2.9 | ||
| 3 | 520 | (5 027;5 431) | 522 | 535 | 535 | 0.4 | 2.9 | 2.9 | ||
| 4 | 520 | (4 591;5 172) | 495 | 538 | 503 | 4.8 | 3.5 | 3.3 | ||
| 5 | 520 | (3 719;4 731) | 480 | 502 | 505 | 7.7 | 3.7 | 2.9 | ||
| 6 | 520 | (1 727;3 943) | 479 | 507 | 506 | 7.9 | 2.5 | 2.7 | ||
| 工况3 | 1 | 420 | (5 627;5 497) | 481 | 431 | 406 | 14.5 | 2.6 | 3.3 | |
| 2 | 420 | (5 024;5 327) | 452 | 430 | 407 | 7.5 | 2.4 | 3.1 | ||
| 3 | 420 | (4 655;5 057) | 432 | 429 | 433 | 2.9 | 2.1 | 3.1 | ||
| 4 | 420 | (4 111;4 692) | 407 | 408 | 432 | 3 | 2.9 | 2.9 | ||
| 5 | 420 | (3 113;4 097) | 395 | 409 | 429 | 5.9 | 2.6 | 2.1 | ||
| 6 | 420 | (966;3 018) | 402 | 411 | 407 | 4.2 | 2.1 | 3.1 | ||

|
| 图 6 车长误差对比分析 Fig. 6 Comparative analysis of vehicle length errors |
| |
进一步分析,从结果表中可以看出文献[15]所示的两种方法其平均误差分别为2.78%与3.2%,结合现有文献综述表明,该类方法的误差来源主要与匹配算法有关,图像序列对最终结果的影响相对较小,因而具有较高精度。与本研究识别方法相比,虽然该方法能有效避免像素折减所带来的尺寸测定误差,但拼接过程过于繁琐且稳定性较差,因此其实用性还有待进一步提高。
从识别数据的获取方式上看,文献[15]是对车辆立面图像进行配准拼接后测定目标车辆尺寸,因而需从侧面架设相机对目标车辆采用正摄投影方式进行影像数据获取。参考现有交通监测系统中摄像头的布置方式可知,大部分监测系统只能获取车辆正面俯视影像数据,因而无法利用前文所述方法识别目标车辆尺寸。相应地,本研究方法以实际交通流监测影像为背景建立理论模型,直接从相机标定参数中推导出像素尺度因子,避免了繁琐复杂的图像处理过程,在满足精度要求的同时,其计算耗时与目标识别稳定性均明显优于传统视觉测量方法,具有更好的应用前景。
3 应用分析 3.1 设备安装为进一步验证该方法在汽车外轮廓尺寸识别的可行性与准确性,选择在室外场景进行实测试验。交通监测对象为某一主干路段,受制于场地与设备限制,摄影相机以一定俯仰角度并正对行车方向的方式架设在该主干道上方的人行天桥上,以此来模拟智能交通系统中的监测摄像头。完成相机固定与标定工作后,对该路段不同时段进行交通流影像数据采集。
3.2 数据处理进行相机外部参数标定时,利用激光测距仪测得该人行天桥桥面距路面的纵向高度h1为8.2 m,随后采用前文所述方法量测相机光心到桥面的纵向距离h2为1.61 m,由此监测相机到路面的纵向距离h可由h1与h2之和表示,为9.81 m,相机内部参数仍与室内试验相同。
由于场地限制,考虑到底边AB,AC的实际长度d0与d′m不能直接测量得到,考虑结合目标图像序列中的结构化信息对参数进行优化,通过查阅城市综合交通体系规划标准[19](GB/T51328—2018)可知道路黄线标准线段长2 m;同时测得图像中该标线两端纵向像素坐标分别为1 087与2 103,将以上数据代入到式(12)后用换元法对其化简并建立方程组,利用图解法得到解为7.86,进而可知俯仰角α的大小为20.1°,其计算模型参数如表 5所示。
| h/m | d0/m | α/(°) | β/(°) | dm/m | d′m/m | |dm-d′m|/m | 
|
| 9.81 | 3.59 | 20.1 | 53.1 | 28.9 | 27.2 | 1.7 | 6.25 |
3.3 结果分析
在得到上述计算参数后,从采集到的不同时段图像中选择了部分过往车辆进行车辆长度计算,同时查阅目标车辆的尺寸参数,其选择的目标车辆与最终得到的对比结果如表 6所示。为直观表现对比结果,以横坐标表示目标车辆,左侧纵坐标轴为计算长度,右侧为实际车长建立误差分析图如图 7所示。由对比结果中可知,利用本研究提出的计算理论得到的车长计算长度与实际长度平均误差为4.8%,其中最大误差8.2%而最小误差仅为0.5%,说明利用图中标准线段反算得到的俯仰角度及最终得到的像素尺度因子能够较为客观地表示实际的单位长度,进一步验证了本研究计算方法的可靠性与实用性。
| 目标车辆 | 纵向像素坐标 | 计算值/mm | 真实值/mm | 误差/mm | 误差率/% |
| A | (3 407;5 275) | 12 600 | 12 000 | 600 | 5 |
| B | (2 239;3 583) | 4 577 | 4 610 | 33 | 0.7 |
| C | (2 673;3 119) | 4 394 | 4 545 | 151 | 3.3 |
| D | (3 859;4 663) | 4 874 | 4 612 | 262 | 5.6 |
| E | (3 091;4 163) | 4 804 | 4 780 | 24 | 0.5 |
| F | (3 987;4 747) | 4 879 | 4 506 | 373 | 8.2 |
| G | (1;2 393) | 5 256 | 4 885 | 371 | 7.6 |
| H | (5 079; 5 479) | 4 719 | 4 545 | 174 | 3.8 |
| I | (3 151;4 143) | 4 327 | 4 632 | 296 | 6.4 |
| J | (1 495;3 119) | 4 852 | 4 474 | 378 | 8.4 |
| K | (3 663;4 463) | 4 370 | 4 545 | 175 | 3.8 |
| L | (1 023;3 119) | 5 622 | 5 235 | 387 | 6.8 |
| M | (4 847;5 295) | 4 499 | 4 671 | 172 | 3.7 |
| N | (1 487;3 095) | 4 527 | 4 704 | 177 | 3.7 |

|
| 图 7 实际车长误差分析结果 Fig. 7 Analysis result of actual vehicle length error |
| |
4 结论
本研究基于摄影相机成像原理,结合图像轮廓线与RGB色度空间像素定位算法,提出了一种单目视觉测量技术的车辆尺寸识别方法。为验证该方法,分别利用模型车与道路交通流的影像数据进行测量,并与实测车辆长度进行了对比分析,得到以下主要结论:
(1) 本研究提出的单目视觉车辆尺寸识别方法回避了复杂多变而又耗费巨额时间的图像处理过程,直接从相机内外参数中推导出像素尺度因子表达式,在获取目标车辆特征点纵向坐标后实际车辆长度可通过计算快速得出。在满足实际工程测量要求的前提下相较于传统视觉测量方法不仅有效提高其识别效率与稳定性,而且与现有基于机器视觉的车型识别技术相比该方法可不受实际应用环境影响。
(2) 在试验梁桥上对3种模型车进行车长识别试验,从不同测点得到的数字图像中获取试验车目标点位的像素坐标并计算得到模型车长。试验结果表明,基于像素尺度因子的单目视觉识别方法最大误差14.5%,识别精度达到94.7%,对比结果表明本研究提出的单目视觉车辆尺寸识别方法回避了复杂多变而又耗费巨额时间的图像处理过程。在满足交通监测要求的前提下,相较于传统视觉测量方法不仅有效提高其识别效率与稳定性,同时由于该模型与实际交通流监测情况相吻合,因此有着更为广泛的应用前景。
(3) 通过采集得到的交通监测影像识别了部分车辆的长度并与实际长度进行对比,结果表明依据该计算模型得到的车辆长度值与误差在8.4%以内,可靠性较高,能够满足实际应用中的精度要求。
(4) 通过图像目标车辆首尾的像素坐标与像素尺度因子来共同识别车辆长度的方法与现有车长识别技术相比简单方便,为车辆尺寸识别提供一种新的求解思路,进而保证智能交通系统数据来源的准确性与可靠度。对于依靠人工测量获取光心位置造成模型无法实现准确识别等问题,考虑下一步针对光心位置的确定进行研究,并采集真实场景数据进行测试。
| [1] |
肖润谋, 李彬, 陈荫三. 基于大数据的高速公路运输趋势分析[J]. 交通运输工程学报, 2015, 15(5): 85-90, 117. XIAO Rui-mou, LI Bin, CHEN Yin-an. Trend Analysis of Expressway Transportation Based on Big Data[J]. Journal of Traffic and Transportation Engineering, 2015, 15(5): 85-90, 117. |
| [2] |
GB 1589—2016, 汽车、挂车、及汽车列车外廓尺寸、轴荷及质量限值[S]. GB 1589—2016, Limits of Dimensions, Axle Load and Masses for Motor Vehicles, Trailers and Combination Vehicles[S]. |
| [3] |
孔烜, 张杰, 邓露, 等. 基于机器视觉的车辆检测与参数识别研究进展[J]. 中国公路学报, 2021, 34(4): 13-30. KONG Heng, ZHANG Jie, DENG Lu, et al. Research Advances on Vehicle Parameter Identification Based on Machine Vision[J]. China Journal of Highway and Transport, 2021, 34(4): 13-30. |
| [4] |
DROESCHEL D, BEHNKE S. 3D Local Multiresolution Grid for Aggregating Omnidirectional Laser Measurements on a Micro Aerial Vehicle[C]//ISR/ 2014: 41st International Symposium on Robotics. Munich: VDE, 2014: 1-7.
|
| [5] |
UPADHYAYA V, SHAIKH S H. Traffic Monitoring Using Multiple Sensors[J].
International Journal of Sensors, Wireless Communications and Control, 2018, 8(1): 72-84.
DOI:10.2174/2210327908666180307154048 |
| [6] |
ODAT E, SHAMMA J S, CLAUDEL C. Vehicle Classification and Speed Estimation Using Combined Passive Infrared/Ultrasonic Sensors[J].
IEEE Transactions on Intelligent Transportation Systems, 2018, 19(5): 1593-1606.
DOI:10.1109/TITS.2017.2727224 |
| [7] |
LI S, JIANG X, QIAN H, et al. Vehicle 3-dimension Measurement by Monocular Camera Based on License Plate[C]//2016 IEEE International Conference on Robotics and Biomimetics (ROBIO). Qingdao: IEEE, 2016: 800-806.
|
| [8] |
XU Z W, PENG J RU, CHEN X Q. A Method for Vehicle Three-dimensional Size Measurement Based on Laser Ranging[C]// 2015 International Conference on Transportation Information and Safety (ICTIS). Wuhan: IEEE, 2015: 34-37.
|
| [9] |
MOLEBNY V, MCMANAMON P, STEINVALL O, et al. Laser Radar: Historical Prospective: From the East to the West[J].
Optical Engineering, 2017, 56(3): 031220.
|
| [10] |
HAN H, HAN X, SUN F, et al. Point Cloud Simplification with Preserved Edge Based on Normal Vector[J].
Optik International Journal for Light and Electron Optics, 2015, 126(19): 2157-2162.
DOI:10.1016/j.ijleo.2015.05.092 |
| [11] |
张立斌, 吴岛, 单洪颖, 等. 基于激光点云的车辆外廓尺寸动态测量方法[J]. 华南理工大学学报(自然科学版), 2019, 47(3): 61-69. ZHANG Li-bin, WU Dao, SHAN Hong-ying, et al. Dynamic Measurement Method for Vehicle Contour Dimensions Based on Laser Point Cloud[J]. Journal of South China University of Technology (Natural Science Edition), 2019, 47(3): 61-69. |
| [12] |
梁春疆, 段发阶, 杨毅, 等. 车辆外廓尺寸计算机视觉动态测量[J]. 光电工程, 2016, 43(1): 42-48, 54. LIANG Chun-jiang, DUAN Fa-jie, YANG Yi, et al. A Vehicle Outer Contour Dimension Measuring Method Based on Computer Vision Technology[J]. Opto-Electronic Engineering, 2016, 43(1): 42-48, 54. |
| [13] |
赖见辉, 王扬, 罗甜甜, 等. 基于YOLO-V3的侧视视频交通流量统计方法与验证[J]. 公路交通科技, 2021, 38(1): 135-142. LAI Jian-hui, WANG Yang, LUO Tian-tian, et al. A YOLO-V3-based Road-side Video Traffic Volume Counting Method and Verification[J]. Journal of Highway and Transportation Research and Development, 2021, 38(1): 135-142. |
| [14] |
张斌. 基于逆投影面图像匹配的车辆外廓测量技术研究[D]. 西安: 长安大学, 2018. ZHANG Bin. Research on Vehicle External Profile Measurement Technology Based on Inverse Projection Image Matching[D]. Xi'an: Chang'an University, 2018. |
| [15] |
闻江. 基于图像处理的车辆外形测量技术研究[D]. 西安: 长安大学, 2017. WEN Jiang. Research on Vehicle Shape Measurement Technology Based on Image Processing[D]. Xi'an: Chang'an University, 2017. |
| [16] |
王鹏, 熊苗苗, 段一琛. 双目视觉车辆轮廓尺寸测量及误差分析[J]. 西安工业大学学报, 2017, 37(10): 767-772. WANG Peng, XIONG Miao-miao, DUAN Yi-chen. Measurement and Error Analysis of Vehicle Outline Size Based on Binocular Vision[J]. Journal of Xi'an Technological University, 2017, 37(10): 767-772. |
| [17] |
关闯, 魏朗, 乔洁, 等. 一种基于消隐点的单目视觉车辆测距方法[J]. 电子测量技术, 2018, 41(11): 83-87. GUAN Chuang, WEI Liang, QIAO Jie, et al. A Vehicle Distance Measurement Method with Monocular Vision Based on Vanishing Point[J]. Electronic Measurement Technology, 2018, 41(11): 83-87. |
| [18] |
杜海顺, 李嘉宸, 魏兆敏, 等. 基于改进高斯混合模型和卡尔曼滤波的车辆检测与跟踪[J]. 河南大学学报(自然科学版), 2017, 47(6): 693-698. DU Hai-shun, LI Jia-chen, WEI Zhao-min, et al. Vehicle Detecting and Tracking Based on Improved Gaussian Mixture Model and Kalman Filter[J]. Journal of Henan University (Natural Science Edition), 2017, 47(6): 693-698. |
| [19] |
GB/T 51328—2018, 城市综合交通体系规划标准[S]. GB/T 51328—2018, Standard for Urban Comprehensive Transport System Planning[S]. |