 2023, Vol. 40
2023, Vol. 40扩展功能
文章信息
- 王嘉文, 冯洋, 赵靖, 韩印
- WANG Jia-wen, FENG Yang, ZHAO Jing, HAN Yin
- 车道功能与信号控制协同优化方法与实证研究
- Collaborative Optimization Method and Empirical Study of Lane Function and Signal Control
- 公路交通科技, 2023, 40(3): 219-227
- Journal of Highway and Transportation Research and Denelopment, 2023, 40(3): 219-227
- 10.3969/j.issn.1002-0268.2023.03.026
-
文章历史
- 收稿日期: 2022-05-11




 ,
, 许多城市都具有职住分离的空间特性,通勤早晚高峰导致进口道出现交通流向分布不均衡与变化。上述现象加剧了交叉口交通供给与需求的失衡问题,导致常发性拥堵,造成交叉口时空资源的浪费[1]。为了充分利用交叉口的时间与空间资源提高交叉口的运行效率[2-3],近年来我国诸多大城市建设了交叉口动态车道组(Dynamic Lane Grouping,DLG)系统。
DLG可根据交叉口各流向交通需求动态对进口道的车道属性和信号进行实时优化。为了找到交叉口的最优时空协同控制策略,学者已经建立了多种车道分配优化模型。优化对象包括车道功能、信号相位、信号配时,在研究中可将三者整体优化或分步优化。整体优化方法[4-6]可同时求解出最优的车道功能、信号相位与配时,虽然求解时间较长,但可得到交叉口全局最优解,最大程度地提高通行能力。为了满足动态控制计算效率需求,分步控制研究[7-8]可有效降低计算复杂度。例如,Ratrout等[9]将车道功能与相位进行协同优化,以各相位关键流率比之和最小为目标函数,该类模型极大降低了模型变量的个数,求解速度大幅加快。或固定相位方案,将车道功能与信号配时协同优化,有效降低了模型复杂度[10-12]。
综上所述,目前国内外积累了可变车道时空资源协同优化研究成果,提出了不同优化对象组合优化方法。然而,现有研究[13]多限制了可变车道的数量,以期降低计算复杂度,同时较少研究[14]考虑直右混合车道的优化,并且大多研究[14-16]停留在模型优化与仿真验证层面,针对现实工程应用的实证研究较少。因此,本研究做出3点研究贡献:(1)在进口道均可变环境下,实现车道功能与信号配时的一体优化,拓展时空一体优化的适用场景。(2)在车道功能方案中,考虑直右混合车道的可行性,从而给出覆盖面更广的交叉口时空资源建议方案。(3)不仅通过数值计算、仿真分析讨论所提出方法的可行性,同时也在我国城市的典型交叉口进行实地验证,分析提出方法的工程可行性与有效性。
1 问题描述 1.1 模型假设与主要参数在建立DLG模型之前,做出以下假设:
(1) 所研究交叉口为对称设置,所有进口道均为可变转向车道, 几何布局见图 1(a)。

|
| 图 1 交叉口时空资源配置 Fig. 1 Intersection spatio-temporal resource allocation 注: i为交叉口岔口编号,i=1, 2, 3, 4分别为南岔口,西岔口、北岔口、东岔口;VL为可变转向车道;l为进口车道编号,从最左侧车道开始编号;Mi为i岔口进口道最大车道数;p为车道功能编号, p0~p4分别为掉头、左转、直行、直右、右转;ϕ为信号相位编号,ϕ=1, 2, 3, 4分别为相位1~4。 |
| |
(2) 信号相位方案采用对称放行4相位, 见图 1(b)。
(3) 直右合用车道比较常见,本研究只考虑直右1种混合车道,车道功能种类见图 1(c)。
(4) 每个分析周期内,各个转向的交通需求已知, 没有掉头交通需求。
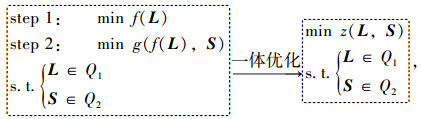
1.2 模型概述传统模型中,步骤1确定车道功能L后,步骤2将其作为输入确定信号配时S,可能导致得到的时空资源方案并非全局最优解。
本研究在传统方法基础上,利用函数z(L, S)将二者统一进行一体优化,一次性输出车道功能与信号配时全局最优解(式(1)),具体模型将在第2节详细展开。
|
(1) |
式中,f, g, z均为优化目标函数;L为车道功能矩阵;S为信号配时矩阵;Q1, Q2为参数的允许范围。
2 时空优化模型 2.1 模型目标函数饱和度是充分反映交叉口交通流供求关系的重要参数。研究表明,在快速识别受益于DLG技术的交叉口中,饱和度被证明是最有效的标准[17]。另外,当采用对称放行4相位时,存在与对向进口同时放行的车流,故该进口与对向进口在车道功能与信号配时存在极大相关性[8]。因此本研究将2个对向进口作为1个进口组进行研究,记为Gv。
模型以交叉口所有进口组各岔口饱和度方差之和最小作为优化目标,表示为:
|
(2) |
|
(3) |
式中,k为时空资源方案的编号;i为交叉口岔口编号,i=1, 2, 3, 4分别表示南岔口、西岔口、北岔口、东岔口;j为车道组编号;yk, i, j为方案k中i岔口j车道组的流量比;yk, i为方案k中i岔口进口道平均车道组流量比;Di为i岔口车道组个数。EL为单独左转车道组,ET为单独直行车道组,TR为直右合用车道组;ER为单独右转车道组。
2.2 时空资源参数车道功能矩阵L按照不同车道功能种类数量表示为

|
(4) |
式中,Lk, i为方案k中i岔口车道功能组合方案;p为车道功能编号,p0~p4分别为掉头、左转、直行、直右、右转;nk, i, p为方案k中i岔口车道功能为p的车道数。
信号配时矩阵S按进口组Gv不同相位绿信比表示为:
|
(5) |

|
(6) |

|
(7) |
式中,Gv为进口组编号,v=1表示南北进口组,v=2表示东西进口组;λk, φ为方案k中相位ϕ绿信比, ϕ为信号相位编号,ϕ=1, 2, 3, 4分别为相位1、相位2、相位3、相位4;Sk, Gv为方案k中Gv进口组信号配时矩阵。
方案k中Gv进口组车道功能组合方案记为Lk, Gv:

|
(8) |

|
(9) |
方案k中Gv进口组绿信比方案矩阵记为λk, Gv:

|
(10) |

|
(11) |
(1) 进口车道数约束
交叉口每个进口的各种车道功能的车道数符合式(12),合用车道的数量符合式(13),否则进口内部车道就将产生冲突。所有车道数之和符合式(14)。

|
(12) |

|
(13) |
|
(14) |
式中Mi为i岔口总车道数。
(2) 流量与车道功能匹配
若某个流向流量大于0,则必须有该流向的车道功能。同理,若某个流向流量等于0,则禁止该流向的车道功能,表示为式(15)~(17)。

|
(15) |

|
(16) |

|
(17) |
式中,qi, 1为i岔口左转交通量;qi, 2为i岔口直行交通量;qi, 3为i岔口右转交通量。
(3) 车道组饱和度约束
当开启合用车道时,若存在多条车道允许同一流向,则多条车道应当具有相同饱和度[18]。应当满足下列约束:
|
(18) |
|
(19) |
式中,qm1为合用车道中直行车辆数;qm2为合用车道中右转车辆数;ERT为右转流量对直行流量折算系数;SET为直行车道饱和流率;SER为右转车道饱和流率。
(4) 各种车道组饱和度计算分别为:
|
(20) |
|
(21) |
|
(22) |
|
(23) |
式中,SEL为左转车道饱和流率;STR为直行与右转合用车道饱和流率;λk, j为方案k中j车道组的绿信比。
(5) 交叉口进出口车道平衡
一般情况下,出口道车道数要大于等于左侧右转车道、对向直行车道和右侧左转车道的车道数。
左侧右转车道满足:

|
(24) |
对向直行车道满足:

|
(25) |
右侧左转车道满足:
|
(26) |
式中,ni, p为i岔口车道功能为p的车道数;e(i)为岔口序号转换函数,定义为:若i≤4,e(i)=i,否则i>4,e(i)=i-4。
(6) 右转车道数约束
在右转车辆不受信号控制时,设置专用右转车道,右转车辆往往有更好的通行效率。在本研究中设置一个阈值γ,表示右转流量比与直行流量比的比例,只要大于这个阈值,就可以设置专用右转车道。关于阈值的确定未来做进一步研究,本研究暂使用50%。
2.4 模型时间资源约束式(27)表示各相位绿信比应在最小绿灯时长和周期时长之间取得。式(28)表示各相位绿信比之和应该不超过周期:
|
(27) |
|
(28) |
式中,gmin为交叉口最小绿灯时长;C为信号周期时长。
2.5 模型求解信号交叉口时空资源协同优化模型可由上述非线性规划模型描述,其目标函数为式(2),约束条件为式(12)~(28)。由于进口车道数一般不超过10条,其所有车道功能方案有限,所以可以采用枚举法进行求解。通过下述步骤对模型进行求解。
(1) 初始化输入分析周期T的数据,进入步骤(2)。
(2) 枚举所有满足约束条件(12)~(26)的进口道车道功能矩阵Li, k,交叉组合形成Lk,进入步骤(3)。
(3) 循环取出所有Lk,枚举所有满足约束条件(27)~(28)的信号配时矩阵S,代入计算目标函数式(2),选取其中最小值即为全局最优解。
在每个分析周期T,通过上述模型均可形成最优时空资源配置方案,但并不是每次生成不同车道功能方案都需要实施。这是因为当交通需求变化不明显时,仅调整信号配时参数足以应对这些波动,且车道功能的切换不能太频繁,可能给驾驶员带来困惑造成安全隐患。对于优化方案是否实施,只有同时满足下面2个条件才实施:
(1) 交叉口运行效率改变程度:当交叉口车均延误减少10%时才考虑改变车道功能。
(2) 变化频率:这里设置最高的变换时间为15 min。
3 数值分析本节将通过一系列算例,比较不同交叉口几何条件和交通流量下,DLG交叉口较常规交叉口的延误降低量,分析DLG交叉口的适用范围。为分析方便,做如下假设:
(1) 数值计算采用的交叉口4个岔口均为5个进口道和3个出口道。固定方案中,车道功能始终固定为1个左转、3个直行和1个右转车道。
(2) 在1个分析周期T内,每个进口流量相同,分为低、中、高流量3挡,分别为800,1 200和1 600 pcu/h。
(3) 每个进口左转比例为α,直行比例为β,右转比例为(1-α-β),α,β∈[10%,80%],α+β≤1。
(4) 交叉口采用简单4相位,根据HCM2010确定不同进口流量下的周期,分别为85,130,160 s。
(5) 算例中取SEL=1 650 pcu/h,SET=1 800 pcu/h,STR=1 650 pcu/h,SER=1 550 pcu/h,ERT=SET/SER。
数值分析采用3种方案进行对比分析。方案1为固定配时方案,即在车道功能固定下,利用2阶段法进行信号优化;方案2为分步优化方案,即先优化车道功能再优化信号配时;方案3为本研究提出的协同优化方案。
使用PYTHON进行编程,对3档流量下的3种方案进行交叉组合,共9次试验。不同试验下最优时空资源配置见图 2。图中坐标轴代表交通流量不同转向比例,黑色实线划分区域表示不同车道功能所处最优流量区间, 颜色深浅代表直行绿信比大小。M1~M9坐标均为(20, 40),将在后面做仿真分析。由图 2可得:

|
| 图 2 数值计算中时空资源配置结果 Fig. 2 Result of space-time resource allocation in numerical calculation |
| |
对于空间资源配置,分步优化方案与协同优化方案使其离散分布于不同流量区间,随着直行比例或左转比例的升高, 直行车道数或左转车道数逐渐增加,即当交叉口供需关系变化幅度较大时,需切换车道功能进行调节。
对于时间资源配置,在分步优化方案与协同优化方案用于同一车道功能区间时,随着直行比例的升高,直行绿信比逐渐升高, 即当交叉口供需关系变化幅度不大时,仅需调整绿信比。对于固定配时方案,由于车道功能不变,随着交通转向比例变化, 只能对直行绿信比进行调节。
为进一步比较DLG的交通效率提升量,采用车均延误作为评价指标,结果如图 3所示。图 3中坐标轴分别代表交通流量转向比例,方格颜色代表协同优化方案相比其他方案延误降低比。

|
| 图 3 数值计算中车均延误对比结果 Fig. 3 Comparison result of average vehicle delay in numerical calculation |
| |
由图 2(a)、图 2(c)、图 2(e)可得,协同优化方案相对固定配时方案总体上有助于降低交叉口延误。算例中,与固定方案相比,协同方案对通行效率最高提升30%。
由图 2(b)、图 2(d)、图 2(f)可得,协同优化方案相对分步优化方案延误降低区间主要集中在直行比例小于30%时,当大于30%时协同优化方案与分步优化方案优化结果一致。图中也存在较少车均延误增加的点,一种合理的解释是分步优化方案在第1步优化中无法与协同优化方案目标函数保持一致,导致出现更优解。但整体上,协同优化方案车均延误均小于等于分步优化方案,证明了采取时空一体化优化可以提高交叉口交通效率。
4 仿真分析为了验证模型适用性,使用VISSIM对模型进行仿真分析。由于检查所有交通需求组合非常耗时,现取左转比例和直行比例分别为40%和20%进行仿真分析,即图 2中的M1~M9点。根据交叉口几何布局和流量,使用synchro仿真软件确定3档流量下周期分别为85,130,160 s,以交叉口车均延误作为评价指标,对不同进口流量和不同方案进行正交仿真,共仿真9次。VISSIM仿真延误结果见表 1所示。
| 方案 | 3档流量(pcu·h-1)下仿真延误结果/s | ||
| 800 | 1 200 | 1 600 | |
| 固定配时方案 | 20.4 | 36.2 | 72 |
| 分步优化方案 | 19 | 32 | 44 |
| 协同优化方案 | 18.3 | 29.5 | 37.5 |
协同优化方案相比于分步优化方案,随着流量增加,车均延误分别下降了3.7%,7.8%和14.7%,本研究提出的协同优化方案可有效提高交叉口效率。并且在高流量需求下,效果更好。
5 实证研究 5.1 交叉口基本参数实证地点为杭州市滨盛路机场城市大道交叉口,试验数据来源于视频检测器收集到的交通流量数据,时间为2020年5月14日09:00—10:00。该交叉口为典型的4相位信号控制交叉口,交叉口现状信号配时方案及各进口道车道功能划分见图 4。

|
| 图 4 实证交叉口时空资源配置与测试场景 Fig. 4 Empirical intersection space-time resource allocation and test scenario |
| |
5.2 实证结果
根据交叉口现状,对机场大道北进口提出2种方案进行实证分析。方案1固定现有时空资源配置,作对比分析;方案2根据本研究模型,按实时流量优化时空资源配置。但因为工程系统原因,实证仅实现了动态分步优化方法。测试期间北进口流量数据、车道功能配置及信号配时见表 2。根据现场无人机拍摄视频,实测车均延误见图 5。
| 序号 | 测试时间 | 流量/(pcu·h-1) | 车道配置 | 信号配时参数/s | |||
| 左转 | 直行 | 左转绿灯 | 直行绿灯 | 周期/s | |||
| 固定配时方案 | 09:00—09:15 | 72 | 72 | 1左3直2右 | 35 | 25 | 130 |
| 动态分步优化方案 | 09:20—09:35 | 78 | 96 | 2左2直2右 | 35 | 25 | 130 |

|
| 图 5 两种方案车均延误对比 Fig. 5 Comparison of vehicle delays between 2 schemes |
| |
根据图 5可知,采用动态分步优化方案后,虽然直行进口道车均延误提升9.4%,但左转进口道车均延误降低20%,北进口左转与直行车均延误降低6.7%。说明本研究提出的交叉口时空资源协同优化可有效降低交叉口车均延误,提高交叉口运行效率。
6 结论本研究通过DLG技术,建立了单个信号交叉口车道功能和信号配时协同优化模型。通过数值计算、仿真分析了交叉口在不同交通需求下采用3种方案的运行效果,为同类型交叉口的交通管理提供依据。结果表明,协同优化方法对降低交叉口的车均延误有积极影响,在高流量下尤为明显,相比仅优化信号,通行效率最高提升30%。同时也在我国城市的典型交叉口进行实地验证,证明提出的方法具有一定工程可行性。
后续研究可考虑将周期和相位协同优化,进一步提高交叉口适应交通需求失衡的能力。因本研究只考虑直右1种混合车道,故后续研究还可以讨论其他情况的交叉口,如包含左直混合车道交叉口等情况,开展更多的研究和实证。
| [1] |
赵靖, 周溪召. 交叉口可变车道最佳车道功能及信号转变方法[J]. 上海理工大学学报, 2016, 38(4): 380-386. ZHAO Jing, ZHOU Xi-zhao. Optimal Switching Method for Lane Assignment and Signal Control for Variable Lanes at Intersections[J]. Journal of University of Shanghai for Science and Technology, 2016, 38(4): 380-386. DOI:10.13255/j.cnki.jusst.2016.04.013 |
| [2] |
宋现敏, 张亚南, 马林. 交叉口动态车道与交通信号协同优化方法[J]. 交通运输系统工程与信息, 2020, 20(6): 121-128. SONG Xian-min, ZHANG Ya-nan, MA Lin. An Optimization Model for Dynamic Lane Grouping and Signal Phase at Intersection[J]. Journal of Transportation Systems Engineering and Information Technology, 2020, 20(6): 121-128. |
| [3] |
梁子君, 张卫华, 杨伟, 等. 基于时空资源优化的交叉口交通流动态控制方法研究[J]. 合肥工业大学学报(自然科学版), 2020, 43(9): 1240-1249. LIANG Zi-jun, ZHANG Wei-hua, YANG Wei, et al. Research on Dynamic Control Method of Traffic Streams at Intersection Based on Time-space Resource Optimization[J]. Journal of Hefei University of Technology (Natural Science Edition), 2020, 43(9): 1240-1249. DOI:10.3969/j.issn.1003-5060.2020.09.017 |
| [4] |
WONG C K, HEYDECKER B G. Optimal Allocation of Turns to Lanes at an Isolated Signal-controlled Junction[J].
Transportation Research Part B: Methodological, 2011, 45(4): 667-81.
DOI:10.1016/j.trb.2010.12.001 |
| [5] |
张鹏, 李文权, 常玉林. 基于Ring-Barrier相位的交叉口车道功能判分与信号配时协同优化模型[J]. 东南大学学报(自然科学版), 2013, 43(3): 659-663. ZHANG Peng, LI Wen-quan, CHANG Yu-lin. Collaborative Optimization Model of Lane Markings and Signal Timings Based on Ring-Barrier Phase at Intersections[J]. Journal of Southeast University (Natural Science Edition), 2013, 43(3): 659-663. |
| [6] |
文婷. 考虑车道配置的变需求交叉口信号控制方案研究[D]. 成都: 西南交通大学, 2019. WEN Ting. Research on Signal Control Strategies for Intersections with Variable Traffic Demands Considering Lane Allocation[D]. Chengdu: Southwest Jiaotong University, 2019. |
| [7] |
赵靖, 付晶燕, 杨晓光. 信号控制交叉口动态车道功能优化方法[J]. 同济大学学报(自然科学版), 2013, 41(7): 996-1001. ZHAO Jing, FU Jing-yan, YANG Xiao-guang. Optimization Model of Dynamic Lane Assignment for Isolated Signalized Intersections[J]. Journal of Tongji University (Natural Science Edition), 2013, 41(7): 996-1001. DOI:10.3969/j.issn.0253-374x.2013.07.006 |
| [8] |
曾滢, 杨晓光, 马莹莹. 交叉口动态车道功能与信号控制协同问题研究[J]. 同济大学学报(自然科学版), 2009, 37(7): 903-908. ZENG Ying, YANG Xiao-guang, MA Ying-ying. Study on Synergy Problem of Dynamic Lane-use Assignment and Signal Control at Intersections[J]. Journal of Tongji University (Natural Science Edition), 2009, 37(7): 903-908. DOI:10.3969/j.issn.0253-374x.2009.07.011 |
| [9] |
RATROUT N, ASSI K. Development and Evaluation of a Quick Method for Optimizing a Space and Signal Timing Plan for Isolated Signalized Intersections[J].
Transport, 2020, 36(2): 164-75.
DOI:10.3846/transport.2020.12693 |
| [10] |
ZHOU G, MAO L, CAO H, et al. Dynamic Allocation Model for Reversible Lanes in the Intelligent Vehicle Infrastructure Cooperative System[J].
Journal of Advanced Transportation, 2021, 2021: 1-14.
|
| [11] |
ALHAJYASEEN W K M, NAJJAR M, RATROUT N T, et al. The Effectiveness of Applying Dynamic Lane Assignment at All Approaches of Signalized Intersection[J].
Case Studies on Transport Policy, 2017, 5(2): 224-32.
DOI:10.1016/j.cstp.2017.01.008 |
| [12] |
ALHAJYASEEN W K M, RATROUT N T, ASSI K J, et al. The Integration of Dynamic Lane Grouping Technique and Signal Timing Optimization for Improving the Mobility of Isolated Intersections[J].
Arabian Journal for Science and Engineering, 2016, 42(3): 1013-24.
|
| [13] |
ZHOU H, DING J, QIN X. Optimization of Variable Approach Lane Use at Isolated Signalized Intersections[J].
Transportation Research Record, 2016, 2556: 65-74.
DOI:10.3141/2556-07 |
| [14] |
李丽丽, 姚荣涵, 周红媚, 等. 渠化可变导向车道交叉口预设信号配时优化模型[J]. 吉林大学学报(工学版), 2015, 45(1): 75-81. LI Li-li, YAO Rong-han, ZHOU Hong-mei, et al. Optimization Model for Pretimed Signals at an Intersection with Reversible Approach Lanes[J]. Journal of Jilin University (Engineering and Technology Edition), 2015, 45(1): 75-81. |
| [15] |
赵靖, 马万经, 韩印. 出口车道左转交叉口几何及信号组合优化模型[J]. 中国公路学报, 2017, 30(2): 120-127. ZHAO Jing, MA Wan-jing, HAN Yin. Integrated Optimization Model of Layouts and Signal Timings of Exit-lanes for Left-turn Intersections[J]. China Journal of Highway and Transport, 2017, 30(2): 120-127. DOI:10.3969/j.issn.1001-7372.2017.02.014 |
| [16] |
梁士栋, 陈丽娟, 王影, 等. 信号交叉口直右动态车道优化设计及评价分析[J]. 公路交通科技, 2022, 39(3): 183-190. LIANG Shi-dong, CHEN Li-juan, WANG Ying, et al. Optimization Design and Evaluation Analysis on Dynamic Straight-right Lane at Signalized Intersection[J]. Journal of Highway and Transportation Research and Development, 2022, 39(3): 183-190. DOI:10.3969/j.issn.1002-0268.2022.03.023 |
| [17] |
SU P, JIANG X, JAGANNATHAN R, et al. Dynamic Lane Grouping at Signalized Intersections: Selecting the Candidates and Evaluating Performance[J].
ITE Journal, 2015, 85(11): 42-47.
|
| [18] |
聂磊, 马万经. 基于车道的交叉口车道功能和信号相位优化模型[J]. 同济大学学报(自然科学版), 2020, 48(5): 683-693. NIE Lei, MA Wan-jing. A Lane-based Optimization Model for Lane Function and Signal Phase at Intersection[J]. Journal of Tongji University (Natural Science Edition), 2020, 48(5): 683-693. |