 2023, Vol. 40
2023, Vol. 40扩展功能
文章信息
- 冯移冬, 马国翔, 董文慧, 廖军洪, 张旭冉
- FENG Yi-dong, MA Guo-xiang, DONG Wen-hui, LIAO Jun-hong, ZHANG Xu-ran
- 基于驾驶模拟试验的立体复合高速公路出口指路标志布设
- Layout of Exit Guide Signs for 3D Composite Expressway Based on Driving Simulation Test
- 公路交通科技, 2023, 40(2): 206-213
- Journal of Highway and Transportation Research and Denelopment, 2023, 40(2): 206-213
- 10.3969/j.issn.1002-0268.2023.02.025
-
文章历史
- 收稿日期: 2023-01-10




2. 瑞士酒店管理大学, 蒙特勒 沃州 CH-1824, 瑞士;
3. 北京工业大学, 北京 100124
2. Swiss Hotel Management School, Montreux Vaud CH-1824, Switzerland;
3. Beijing University of Technology, Beijing 100124, China
随着我国高速公路迅猛发展,其路网密度增加的同时,结构和形式也愈加复杂,部分地区甚至出现了双层复合式立体高速公路。复杂的高速公路互通区域是交通事故的高发区,据统计,日本高速公路约20%的交通事故发生在互通式立交区域[1];美国发生在出口匝道的事故数占互通式立交范围内总事故数的约45%[2]。相关研究表明,高速公路互通区域发生事故的主要原因是车速过高、交通流转换交织频繁[3]。张琪,王雪松等[4]研究发现,相比无匝道路段,有匝道路段事故风险较高,其中先进后出路段风险最高。在事故与道路交通设施的关联性方面,张云娇[5]研究发现,我国高速公路因交通标志导致的交通事故率逐年攀升,与交通标志相关的事故占事故总数的63.03%。如何在立体复合式高速公路互通区域设置恰当的交通标志,给驾驶人传递恰当引导信息以保障行车安全,已成为标志研究领域的重点和难点问题。
对于高速公路交通标志,大多数学者主要针对标志的信息量、版面设计及布设位置进行探究。美国的NCHRP发现,指路标志信息过载会致使驾驶人无法做出恰当的反应[6]。徐洪亮[7]针对高速公路和快速路进出口端的三角区域内的交通指路标志信息量过载问题,提出了不同类型指路信息采用嵌入式设计的理念。
事实上,不同环境下驾驶人对相同交通标志的识认特性也不同。在立体复合高速公路互通立交区域,由于连接不同方向、不同层级道路的匝道数量较多且间距较小,驾驶人获取标志信息的工作负荷要更大,需在较短时间内完成标志识别、视认、反应、判断、减速和转换车道等操作,极易因漏看或反应不及时导致操作失误。对此,本研究针对立体复合高速公路出口匝道变换处的复杂情况,依托驾驶模拟试验,研究了不同指路标志设置方法对驾驶行为的影响,并给出推荐设置方案。研究成果可为立体复合高速公路指路标志优化设置提供参考。
1 基于驾驶模拟试验的标志视认研究 1.1 试验人员本研究基于预期方差、目标置信度和误差幅度计算所需最小样本量为20。实际共招募32名持有驾照、身体健康、视力正常的驾驶人作为被试,其中男性占62.5%,女性占37.5%,年龄区段为18~55岁。被试的性别比例和年龄分布基本符合中国驾驶员统计特征。同时,为了更好的试验效果,被试驾龄均多于2 a,且86%的被试有高速公路驾驶经验。
1.2 试验设备出于行车安全方面的考虑,本研究采用驾驶模拟器开展试验探究。实际上,驾驶模拟器可以较好获取驾驶人的真实反应,是研究不同条件下驾驶行为的有效工具[8]。驾驶模拟器的性能对试验结果有较大的影响,因此选取了高还原度的驾驶模拟器,并在使用前对驾驶模拟器相关参数进行了全面的校准和验证。
本研究所采用驾驶模拟器由一辆试验车辆、数据处理计算机和视频、音频输出设备组成,具有3个运动自由度。可实时采集车辆运行状况主要数据(速度、加速度、横向偏移、加速踏板功效、刹车、方向盘转角等),采集频率可达20 Hz。
1.3 场景设计试验场景原型为深圳某双层复合式高速公路,该高速公路是我国首个空间结构的上下分层高速公路,由立体层和地面层组成8+8车道复合高速公路通道断面,设计速度100 km/h;长距离及过境交通主要从立体层通过,中、短距离及城市组团内部交通则选择地面层,立体层与地面层之间设置有多处上下转换匝道。
通过对该高速公路路网结构及运行环境进行分析,梳理出路网中信息指引需求最高的某复合式互通立交节点。在该互通驾驶人既需要出口目的地信息的指引,又需要上下层级转换信息的指引,因此该节点也是标志指引最为困难的关键节点。考虑到模拟驾驶的连贯性,试验选取了该互通前后共6.5 km长的路段作为试验路段。
在场景设计中,共有3个标志关键设置点位,分别为决策点1(出口匝道渐变段起点)、决策点2(匝道内转换立体层/被交道路的位置)和决策点3(去往被交道路不同方向的位置)。试验测试路线共两条:路线1为驾驶人由主线驶出匝道去往平湖方向,即上游预告-决策点1-决策点2-决策点3-平湖方向;路线2为驾驶人由主线驶出匝道去往李朗方向,即上游预告-决策点1-决策点2-决策点3-李朗方向。3个标志关键设置点位及两条试验测试路线如图 1所示。

|
| 图 1 试验路线 Fig. 1 Experimental route |
| |
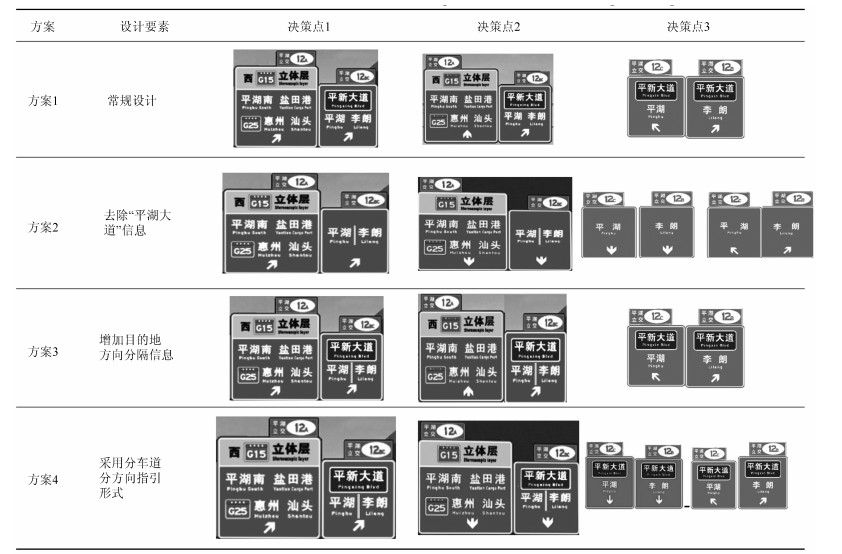
在试验标志版面设计方面,本研究参考我国现行标准规范及国内外有关标志布设案例,提取关键设计要素,从便于试验分组设计的角度,共提出了4种不同的指路标志布设方案,如表 1所示。
为了增加真实性,减小仿真与实际情况的差距,课题组在试验车附近设置了一定的交通流,以模拟现实行车环境。
1.4 试验流程在预试验基础上开展正式试验,32名被试按照随机顺序完成试验测试。试验步骤如下:(1)被试填写个人信息表及试验前生心理表;(2)预试验练习5 min,宣读试验指导语;(3)告知被试驾驶目的地信息,正式开始试验测试;(4)试验结束后,被试填写试验后生心理表以评估驾驶过程中的心理主观感受,填写主观问卷以评估模拟场景的真实度。
1.5 数据预处理及指标选取在高速公路出口区域,由于出口匝道的存在,其交通流特征会发生较大的改变,主要反映在准备驶出高速公路的驾驶人行为变化上,如减速、变换车道、超车等。根据日常驾驶经验,右转驶离车辆在500 m出口预告标志之前基本都完成了变道行为,在到达出口渐变段起点之前车速会明显下降,进入减速车道后下降幅度会更大。
结合对试验场景中指路标志视认位置的反复测试,定义驾驶人在某一交通标志前200 m位置为视认起点[9]。则该标志前200 m位置(视认起点)至下一标志牌前200 m的位置作为指路标志的作用范围。
此外,为精准描述行为数据空间变化趋势,本研究以10 m为固定的空间间隔对数据进行切分。由于普通驾驶人的典型感知时间约为1.5 s,因此,采用10 m的距离足以微观刻画研究驾驶人的行为特征。
在高速公路行驶过程中,驾驶人需要在短时间内对一系列标志进行发现、识别、认读和理解、反应与操作[10]。因此在探究不同标志设计方案对驾驶人的影响时,需要考虑驾驶人对指路标志的视认、反应及决策等特征[11-12],根据各个关键点位的影响区域对驾驶人驶出匝道出口时在感知判断、操纵行为、车辆运行方面的表征指标进行研究。
各研究指标选取分析及定义如下:
(1) 感知判断
在200 m视认范围内,当驾驶人看到标志时会下意识松加速踏板以放慢速度,当视认完成后会踩加速踏板加速。整个加速踏板变化过程的时间能反映驾驶人的操控意识及视认过程,驾驶人的反应起始位置可以反映驾驶人对标志的响应程度和在标志影响下的控速意识。
反应时间:在200 m视认范围内,当驾驶人看到标志时会下意识开始松加速踏板时的时间到开始完成视认踩加速踏板这段时间定义为驾驶人的反应时间。
反应起始位置:在200 m视认范围内,驾驶人看到标志第1次松加速踏板的位置定义为驾驶人的反应起始位置。
(2) 操纵行为
方向盘转角:表示方向盘的幅度,表征对车辆横向位置的控制及驾驶心理状况[13]。立体复合高速公路行车过程中,驾驶人需要根据交通标志给予的交通信息反复地微调修正方向盘,以保证车辆在车道中心行驶。该值越小,表明驾驶人对车辆的控制能力较强。
(3) 车辆运行
速度:反映驾驶人在立体复合高速公路行车的运行效率,较低的平均速度有利于驾驶安全性。
加速度:表征驾驶人受外界干扰对车辆运动速度变化调整的快慢。国标GB/T 13441.1—2007[14]提出了加速度值与人的主观感觉间的关系,即加速度越大主观不舒适性越强。
2 试验结果与讨论 2.1 影响特征分析针对指路标志的影响范围,采用单因素重复测量方差分析,探究不同原则下的4种指路标志设置方案对驾驶人行为特征的影响。Shapiro-Wilk检验表明,各组数据服从正态分布(P>0.05)。对于统计分析结果,p≤0.05表明分析结果有显著差异;0.05≤p≤0.1表明分析结果有边缘显著(Marginally Significant)差异[15]。指标统计结果如图 2所示。

|
| 图 2 指标分析 Fig. 2 Analysis of indicators |
| |
根据设计要素及原则的不同,本研究在每个区段进行比较的方案不同。结论如下:
(1) 决策点1
除方向盘转角和加速度外,其他指标均具有统计学意义。相关数据表明决策点1处,若简化标志信息,即方案2中去掉“平新大道”信息,会对驾驶员的换道、控速意识产生一定影响。
(2) 决策点2
不同方案对反应时间、反应起始位置和加速度的影响存在统计学差异。相关数据表明,在决策点2处,简化标志信息、设置不同方向目的地分隔信息及车道指引显著影响驾驶行为,虽然增加了驾驶人的感知判断时间,但能够让驾驶人提前获得交通信息,促使驾驶人提前换道,使驾驶人保持较好的心理状态进行驾驶,加速度变化更平稳,驾驶体验更舒适。
(3) 决策点3
除速度和加速度外,不同方案下其他指标均具有统计学意义。相关数据表明车道指引在增加驾驶人感知判断的同时,能够促使驾驶人提前换道,根据目的地做出相应决策。同时,设置车道指引更有利于驾驶人保持平稳车速行驶,给予驾驶人适当的引导,保持良好的操作稳定水平。
2.2 模糊综合评价不同指路标志设计方案的优劣在各个指标评价下存在差异,不能得到最优方案。本研究基于感知判断、操纵行为、车辆运行3方面的行为数据,采用熵权法的模糊综合评估模型进行立体复合高速公路匝道处指路标志作用效果的综合评估及方案优选。
模糊综合评估模型能够较好地解决模糊的、难以量化的问题。主要运用模糊数学的原理,把定性评价转化为定量评价,适合多层次、多因素问题的解决。本研究以决策点1处的方案1为计算案例进行说明。
2.2.1 确定评价指标集本研究基于第1.5节构建的评价指标体系确定评价指标集。设各评价指标n项,定义评价指标集为U′= {u′ 1, u′ 2, u′ 3, …, u′ n}。
2.2.2 建立权重集在评价因素集中,各因素的重要程度不同,需确定相应权重来反映重要程度。研究表明[16],熵权法能够客观、合理地确定权重值,简化模糊评估模型。通过熵权法计算各指标权重,如表 2所示。
| 指标 | 反应时间/s | 反应起始位置/m | 方向盘转角/rad | 速度/(km·h-1) | 加速度/(m·s-2) |
| 信息熵 | 0.980 | 0.976 | 0.991 | 0.984 | 0.993 |
| 信息冗余度 | 0.020 | 0.024 | 0.009 | 0.016 | 0.007 |
| 各指标权重 | 0.267 | 0.320 | 0.113 | 0.208 | 0.093 |
2.2.3 建立评语集
模糊综合评价中可以将每项评价指标划分为n个评价等级,即V= {v1, v2, v3, v4, v5}。在本研究中,评语集确定为V= {v1, v2, v3, v4, v5},分别对应好、较好、一般、较差、差5个等级。
2.2.4 建立评价矩阵由于缺乏相应的分类参考,本研究采用K-means聚类算法计算数据的聚类区间,以确定各等级取值范围,进而利用指标隶属度函数建立评价矩阵。
(1) 确定评价等级的取值范围
采用K-means算法对各项指标集进行聚类以确定评价等级取值范围。具体算法[17]如下:
① 确定初始聚类中心si, si,k为数据样本矩阵Ti中的选择的k个样本点。
② 计算每个样本点pi与聚类中心si的距离,计算如式(1)所示:

|
(1) |
式中,dis (pi, si)为欧氏距离;pin为第i个对象的第n个属性;sin为第i个聚类中心的第n个属性。
③ 将所有样本划分到离其最近的类簇中心点所代表的类簇中。
④ 重新计算每类簇的中心点λi,计算如式(2)所示:
|
(2) |
式中,sk为第k个聚类中心;N为第k个聚类中心的对象数据。
⑤ 迭代分配样本,更新类簇中心点,直至类簇中心点变化很小或者达到指定迭代次数。
各评价等级的取值如表 3所示。
| 评价指标 | 现状 | 等级1 | 等级2 | 等级3 | 等级4 | 等级5 |
| 反应时间/s | 10.623 | 2.899~6.445 | 6.446~9.335 | 9.336~13.210 | 13.211~18.035 | 18.036~21.953 |
| 反应起始位置/m | 5 799.355 | 5 710.000~5 742.145 | 5 742.146~5 797.010 | 5 797.011~5 861.890 | 5 861.891~5 918.795 | 5 918.796~5 960.000 |
| 方向盘转角/rad | 0.036 | 0.015~0.030 | 0.031~0.045 | 0.046~0.065 | 0.066~0.090 | 0.091~0.105 |
| 速度/(km·h-1) | 71.517 | 48.13~57.260 | 57.26~69.725 | 69.726~81.740 | 81.741~95.635 | 95.636~106.826 |
| 加速度/(m·s-2) | 0.585 | 0.021~0.335 | 0.336~0.565 | 0.566~0.761 | 0.762~1.241 | 1.242~1.620 |
(2) 建立隶属度矩阵
模糊关系矩阵R通过指标归一化,构建隶属度函数得到。本研究设评价指标因子的参数实测值为λi,评价等级的取值区间为参数实测值的允许范围[api, bpi], [aij, bij]。对于评价指标集的每个指标Ui,分析其对于评语集Vj隶属度rij,某指标对评语集的隶属度确定如下[18]:
|
(3) |
式中,ρ1=|λi-1/2(aij+bij)|-1/2(bij-aij);ρ2=|λi-1/2(api+bpi)|-1/2(bpi-api)。
经过计算,得到隶属度矩阵(m×n),如表 4所示。
| 评价指标 | 等级1 | 等级2 | 等级3 | 等级4 | 等级5 |
| 反应时间/s | -0.35 | -0.14 | 0.33 | -0.25 | -0.49 |
| 反应起始位置/m | -0.39 | -0.03 | 0.04 | -0.41 | -0.57 |
| 方向盘转角/rad | -0.22 | 0.34 | -0.33 | -0.60 | -0.73 |
| 速度/(km·h-1) | -0.38 | -0.07 | 0.15 | -0.30 | -0.51 |
| 加速度/(m·s-2) | -0.31 | -0.03 | 0.10 | -0.24 | -0.54 |
2.2.5 模糊综合评估结果
计算得到模糊综合评估结果向量t,即
|
(4) |
式中∘为模糊合成算子。
本研究采用加权平均型算子,计算得到模糊综合评估结果向量t= (t1, t2, t3,…,ti),ti为某一方案设置效果隶属于评价等级Vj的程度。定义分数梯度矩阵S = (90, 80, 70, 60, 50)T。t与S相乘得到综合评估结果F。
基于以上方法,不同方案指路标志的作用效果的评估结果,如图 3所示。

|
| 图 3 指路标志作用效果综合评估结果 Fig. 3 Comprehensive evaluation result of effect of guide signs |
| |
由图 3可知,决策点1处方案评分排序为方案2>方案1>方案3(方案4同),决策点2处方案评分排序为方案2>方案4>方案3>方案1,决策点3处方案评分排序为方案2>方案1(方案3同)>方案4。因此,综合感知判断、操纵行为、车辆运行3方面5项评价指标,并结合立体复合高速公路匝道的3个关键点位(决策点1、决策点2和决策点3),整体上看方案2为最优设置方案,即增加方向分隔信息和分车道指引信息的同时减少指路标志目的地信息量的指引方案最优。
增加方向分隔信息和车道指引信息,能够较好地实现“空间换取时间”,使驾驶人在面临出口匝道做出决策前获得相应的交通信息并作出反应,能够更加平稳驶出匝道,降低事故风险。值得注意的是,驾驶人在4种方案设计下,决策点2和决策点3处均呈现不同程度的超速现象,对于驾驶人的行驶速度控制仍需要进一步研究。
3 结论(1) 本研究选取反应时间、反应起始位置、方向盘转角、速度、加速度等5项指标,研究立体复合高速公路出口匝道变换处不同指路标志布设方法对驾驶人的影响。通过单因素重复测量方差分析结果可知,不同布设方法对驾驶人驾驶行为具有显著影响。增加方向分隔信息和分车道指引信息,能够使驾驶人反应时间缩短、反应起始位置提前,一定程度上提升车辆操纵水平和速度调控能力,使车辆运行状态更加平稳。
(2) 模糊综合评估模型显示,标志设计方案2为最优方案,即增加方向分隔信息和分车道指引信息的同时减少指路标志目的地信息量的指引方案最优,该方法能够以“空间换取时间”,使驾驶人提前做出反应,更加安全、平稳的驶出匝道。
(3) 基于驾驶模拟试验,本研究提出一种综合评估与优化设置立体复合高速公路出口匝道处指路标志的一般性方法。需要注意的是,文章结果存在一定局限性,由于试验设计、设备采集等原因,并未考虑车辆横向位置指标,使得无法通过分析车辆交织区换道轨迹来评估标志对驾驶人安全换道的影响,对此后续将开展补充研究。
| [1] |
庞渊博. 绕城高速公路互通式立交净距与立交出口交通安全机理研究[D]. 西安: 长安大学, 2020. PANG Yuan-bo. Study on Clear Distance of Interchange and Traffic Safety Mechanism of Interchange Exit for Ring Expressway[D]. Xi'an: Chang'an University, 2020. |
| [2] |
郭忠印, 方守恩. 道路安全工程[M]. 北京: 人民交通出版社, 2003. GUO Zhong-yin, FANG Shou-en. Road Safety Engineering[M]. Beijing: China Communications Press, 2003. |
| [3] |
方守恩, 郭忠印, 陈雨人. 道路安全系统与道路安全工程[J]. 中国公路学报, 2001, 14(增1): 105-108. FANG Shou-en, GUO Zhong-yin, CHEN Yu-ren. Road Safety System and Road Safety Engineering[J]. China Journal of Highway and Transport, 2001, 14(S1): 105-108. |
| [4] |
张琪, 王雪松, 丰明洁, 等. 苏州市高速公路安全统计建模[J]. 汽车与安全, 2021(9): 80-83. ZHANG Qi, WANG Xue-song, FENG Ming-jie, et al. Safety Modeling for Freeway in Suzhou[J]. Auto & Safety, 2021(9): 80-83. |
| [5] |
张云娇. 高速公路交通标志标识优化及其有效性研究[D]. 西安: 长安大学, 2014. ZHANG Yun-jiao. Research on Optimization and Effectiveness of Expressway Traffic Signs[D]. Xi'an: Chang'an University, 2014. |
| [6] |
CHRYSLER S T, WILLIAMS A, SCHROCK S D, et al. Traffic Control Devices for Managed Lanes, FHWA/TX-04/0-4160-16[R]. Austin: Texas Transportation Institute, 2004.
|
| [7] |
徐洪亮. 重庆市内环高速公路指路标志设置问题分析与对策研究[D]. 重庆: 重庆交通大学, 2010. XU Hong-liang. Analysis on Problems in Layout of Chongqing Ring Expressway Guide Signs and Countermeasures Research[D]. Chongqing: Chongqing Jiaotong University, 2010. |
| [8] |
YAO X L, ZHAO X H, LIU H, et al. An Approach for Evaluating the Effectiveness of Traffic Guide Signs at Intersections[J].
Accident Analysis & Prevention, 2019, 129: 7-20.
|
| [9] |
HUANG L H, BIAN Y, ZHAO X H, et al. Quantitatively Exploring the Relationship between Eye Movement and Driving Behavior under the Effect of Different Complex Diagrammatic Guide Signs[J].
Cognition, Technology & Work, 2020, 22(2): 373-388.
|
| [10] |
王仁杰, 周晓宏. 高速公路交通标志的认知及评价综述[J]. 交通信息与安全, 2021, 39(2): 9-18. WANG Ren-jie, ZHOU Xiao-hong. A Review on Cognition and Evaluation of Traffic Signs on Expressways[J]. Journal of Transport Information and Safety, 2021, 39(2): 9-18. |
| [11] |
李青. 高速公路互通立交三车道匝道出口分流区设置研究[D]. 西安: 长安大学, 2020. LI Qing. Research on Setting of Three-lane Off-ramp Diversion Area of Expressway Interchange[D]. Xi'an: Chang'an University, 2020. |
| [12] |
杨景瑞. 高速公路枢纽互通式立交出口指路标志设置研究[D]. 西安: 长安大学, 2018. YANG Jing-rui. Research on Setting of Road Signs for Expressway Hub Interchanges[D]. Xi'an: Chang'an University, 2018. |
| [13] |
郭凤香, 熊昌安, 万华森, 等. 风险情境下老年驾驶人行为特性研究[J]. 中国公路学报, 2021, 34(9): 309-321. GUO Feng-xiang, XIONG Chang-an, WAN Hua-sen, et al. Behavioral Characteristics of Older Drivers Based on Risk Perception[J]. China Journal of Highway and Transport, 2021, 34(9): 309-321. DOI:10.3969/j.issn.1001-7372.2021.09.026 |
| [14] |
GB/T 13441.1—2007, 机械振动与冲击人体暴露于全身振动的评价第1部分: 一般要求[S]. GB/T 13441.1—2007, Mechanical Vibration and Shock — Evaluation of Human Exposure to Whole-body Vibration — Part 1: General Requirements[S]. |
| [15] |
PRITSCHET L, POWELL D, HORNE Z. Marginally Significant Effects as Evidence for Hypotheses: Changing Attitudes over Four Decades[J].
Psychological Science, 2016, 27(7): 1036-1042.
|
| [16] |
李占山, 杨云凯, 张家晨. 基于熵权法的过滤式特征选择算法[J]. 东北大学学报(自然科学版), 2022, 43(7): 921-929. LI Zhan-shan, YANG Yun-kai, ZHANG Jia-chen. Filtering Feature Selection Algorithm Based on Entropy Weight Method[J]. Journal of Northeastern University (Natural Science Edition), 2022, 43(7): 921-929. |
| [17] |
XIAO Q, HE R C, YU J N. Evaluation of Taxi Carpooling Feasibility in Different Urban Areas through the K-means Matter-element Analysis Method[J].
Technology in Society, 2018, 53: 135-143.
|
| [18] |
陈红, 周继彪, 王建军, 等. 公路隧道运行环境安全评价指标与方法[J]. 长安大学学报(自然科学版), 2013, 33(4): 54-61, 74. CHEN Hong, ZHOU Ji-biao, WANG Jian-jun, et al. Safety Evaluation Indexes and Method for Traffic Environment of Highway Tunnels[J]. Journal of Chang'an University (Natural Science Edition), 2013, 33(4): 54-61, 74. |