 2023, Vol. 40
2023, Vol. 40扩展功能
文章信息
- 战琦, 周炜, 李文亮, 张学文, 刘智超
- ZHAN Qi, ZHOU Wei, LI Wen-liang, ZHANG Xue-wen, LIU Zhi-chao
- 基于组合赋权的车辆智能换道避障功能模糊综合评价
- Fuzzy Comprehensive Evaluation on Vehicle Intelligent Obstacle Avoidance Function by Lane Changing Based on Combination Weighing
- 公路交通科技, 2023, 40(1): 236-244
- Journal of Highway and Transportation Research and Denelopment, 2023, 40(1): 236-244
- 10.3969/j.issn.1002-0268.2023.01.027
-
文章历史
- 收稿日期: 2021-11-25




2. 东南大学,江苏 南京 210000
2. Southeast University, Nanjing Jiangsu 210000, China
无人驾驶车辆在完成功能开发与验证后,形成了较为完整的系统,功能也趋于完善。接着需要对其进行测试与评价,目的是通过测试获得车辆的表现,进而对其各项功能进行评估,以帮助开发人员发现功能的不足或缺陷,有针对性地予以完善[1]。智能避障功能作为无人驾驶车辆安全驾驶的核心功能之一,在保障乘员安全、减少交通事故和提高通行效率方面起到了至关重要的作用。目前针对智能避障功能测试与评价阶段的研究仍处于起步阶段,评价方法存在评价指标体系不完善、评价过程主观意识过强、评价结果不科学等问题,因此本研究针对车辆智能避障功能综合评价开展研究。
按照车辆避障动作,将不停车避障分为换道避障和借道避障两种场景。换道避障是指车辆变换车道躲避障碍物,此时影响车辆行驶的障碍物占用过多当前行驶车道,车辆不得不换道才能保证与障碍物的安全距离。借道避障是指车辆借用部分相邻车道,微调行驶方向躲避障碍物,此时影响车辆行驶的障碍物占用部分车道,安全避障后车辆仍需返回原车道。本研究首先针对车辆智能换道避障功能综合评价开展研究。
综合评价的前提是构建评价指标体系,评价指标的选取应遵循系统性、可行性、科学性等原则,目前对无人驾驶车辆评价指标体系的研究大都针对车辆整体,某项具体功能仅作为其中一项定性指标。综合评价的核心是通过合适的评价方法确定评价对象在各指标上的评价结果,该过程主要包含计算指标权重和建立综合评价模型。计算权重的方法按原始数据的来源可以分为主观赋权法、客观赋权法和主客观结合的组合赋权法3类[2]。主观赋权法根据相应领域专家的知识和经验,对评价指标的重要程度进行两两比较、赋值和计算来确定权重,如层次分析法(Analytical Hierarchy Process,AHP)[3]、专家调查(Delphi)法[4]、序关系分析(G1)法[5]等,主观权重会具有很强的主观性。客观赋权法根据指标初始数据之间的数量关系,采用一定的数学方法计算权重,如主成分分析法[6]、因子分析法[7]、熵值法[8]、CRITIC法[9]等,如果实测数据不具有典型性和普遍性,可能存在权重分配不合理的情况。组合赋权法根据不同的偏好系数将主、客观赋权法求得的权重结合起来,既保留主观赋权法中对专家经验知识与决策者主观意向的信息体现,也保留客观赋权法中对指标与评价对象间内在联系的信息表现,具有优势互补的效果,得到的评价结果相对更加科学、合理。建立综合评价模型则将多个评价指标属性值“合成”为一个整体的综合评价值,主要方法包括灰色关联度法[10]、TOPSIS(Technique for Order Preference by Similarity to an Ideal Solution)法[11]、BP(Back Propagation)神经网络[12]和模糊综合评价法[13]等。
在车辆智能评价方面,Sun[14]从安全性、智能性、平顺性3方面构建评价指标体系,基于拓展层次分析法(EAHP,extension analytic hierarchy process)求取权重,并通过灰色关联分析对无人驾驶车辆的智能行为进行综合量化评价,但受专家主观性影响且需要一致性检验。Zhao[15]基于十字路口、跟车等典型工况建立评价指标体系,通过熵-成本函数方法进行评价,虽然排除了主观因素影响,但过于依赖实测数据且不具备普适性。Huang[16]则通过层次分析法-熵值法和模糊综合评价对无人驾驶车辆的整体性能进行评价,为避免层次分析法计算复杂且存在一致性检验不通过的可能,李茹[17]分析中国智能车未来挑战赛的测试内容,从安全性、系统性、平稳性和速度性4方面构建评价指标体系,基于G1法和熵值法求取权重,通过模糊综合评价法对自动驾驶车辆进行综合智能定量评价。但G1法存在指标重要程度比值固定的问题,熵值法则忽略了指标之间的内在联系。CRITIC法相比于熵值法考虑了评价指标的冲突性和对比程度,已在其他综合评价领域有较好的应用,例如电网[18]、矿业[19]等。
无人驾驶车辆正处于发展阶段,在功能评价过程中不能过度依赖专家主观意愿,也不能完全依据指标的实测数据。为避免评价方法中存在主、客观因素的单一影响,并对车辆智能换道避障功能进行科学评价,首先结合智能换道避障过程阶段及其测试工况,建立评价指标体系,接着基于改进G1法和CRITIC法求取组合权重,并通过模糊综合评价法建立评价模型,对车辆智能换道避障功能进行综合评价,为其功能的进一步发展提供依据。
1 车辆智能换道避障功能综合评价 1.1 智能换道避障功能评价指标体系按照测试环境与外界交通要素的交互程度和测试风险程度,测试由低到高分为封闭环境规范性测试(C1)、封闭环境验证性测试(C2)、有限开放环境验证性测试(C3)、开放环境示范性验证(C4)4个阶段[20]。封闭环境规范性测试阶段不允许其他车辆及相关要素出入,在专用封闭环境进行测试,该阶段测试工况确定,测试方法、手段及结果具有重复性。本研究针对交互程度和测试风险程度较低的封闭环境规范性测试开展研究。车辆智能换道避障测试工况分为直道换道避障和弯道换道避障两类。测试设备要求测得试验车辆的速度精度为±0.1 km/h,横向加速度精度为±0.15 m/s2。试验路面要求压实并且无可能造成传感器异常工作的不规则物,路面干燥、无可见水分、平整、用沥青或混凝土铺装,应具备清晰可见且符合《GB5768.3道路交通标志和标线》要求的标志和标线,坡度不应大于6%。试验环境应符合天气干燥,没有降雨、降雪等情况;试验温度位于5~45 ℃之间;水平方向上的能见度不低于1 km;平均风速应不大于3 m/s。车辆应在制造商规定的载荷状态下进行试验,试验开始后不对车辆载荷进行任何调整。
(1) 直道换道避障
试验道路至少为一条单向双车道的长直道,试验车辆以试验车速沿着符合试验路面要求的道路行驶。当车辆识别到本车道前方障碍物,并确定相邻车道满足换道条件时,执行换道避障动作。该测试工况示意图如图 1所示。

|
| 图 1 直道智能换道避障测试工况示意图 Fig. 1 Schematic diagram of test condition of intelligent obstacle avoidance by lane changing in straight lane |
| |
(2) 弯道换道避障
试验道路至少为一条曲率半径为500 m的单向双车弯道,试验车辆以试验车速沿着符合试验路面要求的道路行驶。当车辆识别到本车道前方障碍物,并确定相邻车道满足换道条件时,执行换道避障动作。弯道换道避障分为与弯道同向换道避障和与弯道反向换道避障,以左弯道为例,同向是指向左换道避障,如图 2(a)所示,反向是指向右换道避障,如图 2(b)所示。

|
| 图 2 弯道智能换道避障测试工况示意图 Fig. 2 Schematic diagram of test condition of intelligent obstacle avoidance by lane changing in curved lane |
| |
换道避障过程是指从转向灯开启至车辆完成换道避开障碍物且转向灯熄灭的过程。换道避障准备阶段是指转向灯开启至前轮外侧接触到即将跨越车道线的内边沿的阶段。换道避障执行阶段是指车辆前轮外侧接触到即将跨越车道线的内边沿至车辆后轮完全跨过车道线。换道避障完成阶段是指车辆进入目标车道,完成换道动作安全避开障碍物,并在当前车道稳定行驶30 m以上。基于车辆智能换道避障过程的不同阶段及其测试工况,评价指标则选取了与车辆智能换道避障功能相关的具体参数,建立了如表 1所示的车辆智能换道避障功能评价指标体系。该评价指标体系包括2个1级指标,即直道换道避障工况和弯道换道避障工况,弯道换道避障工况又分为与弯道同向换道避障和与弯道反向换道避障;每个1级指标下各包括5个2级指标,即换道避障动作流畅性、最大横向加速度、平均横向加速度、换道避障准备时间、换道避障全程时间。
| 目标层 | 要素层A | 指标层B | |
| 智能换道避障功能 | 直道换道避障(A1) | 换道避障动作流畅性(B11) | |
| 最大横向加速度(B12) | |||
| 平均横向加速度(B13) | |||
| 换道避障准备时间(B14) | |||
| 换道避障全程时间(B15) | |||
| 弯道换道避障(A2) | 与弯道同向换道避障(A21) | 换道避障动作流畅性(B21) | |
| 最大横向加速度(B22) | |||
| 平均横向加速度(B23) | |||
| 换道避障准备时间(B24) | |||
| 换道避障全程时间(B25) | |||
| 与弯道反向换道避障(A22) | 换道避障动作流畅性(B26) | ||
| 最大横向加速度(B27) | |||
| 平均横向加速度(B28) | |||
| 换道避障准备时间(B29) | |||
| 换道避障全程时间(B30) | |||
其中,换道避障动作流畅性为定性指标,由试验人员根据车辆在试验中的表现打分,满分10分,若车辆在换道避障过程中不存在间隔延迟,换道动作是连续的,且安全避障,则得10分;若车辆出现1次间隔延迟,则按照时延扣分,每1 s扣1分,时延小于1 s的按照1 s扣分;若车辆出现超过1次间隔延迟或与障碍物发生碰撞,则得0分。最大横向加速度和平均横向加速度对换道避障执行阶段的平顺性、安全性进行评价,平均横向加速度指加速度绝对值对时间积分后除以时间长度。换道避障准备时间、换道避障全程时间分别对换道避障准备阶段和全过程的效率进行评价。
1.2 基于组合赋权的模糊综合评价方法 1.2.1 改进G1法改进G1法采用专家打分的形式避免原方法存在的指标重要程度比较值固定的问题,具体包含以下步骤。
(1) 确定指标之间的序关系
邀请专家对指标的重要程度打分,分值为1~10分,指标XR的重要程度分数用Xk表示打分标准参考表 2。根据专家给出的重要程度分数,将每一层级的指标集{X1, X2, X3, …, Xm}重新排序。若指标Xi的得分高于指标Xj,则说明指标Xi相对于指标Xj重要,记为Xi>Xj,依此得到序关系。
(2) 相邻指标重要程度比值
以某位专家的打分情况为例,将相邻指标的重要程度分数之比作为两指标的权重之比,如式(1)所示:

|
(1) |
式中,m为对应层次的指标数量;pk为相邻指标的权重之比;wsk为指标Xk基于某位专家打分得到的主观权重。
(3) 计算主观权重
基于该专家打分的主观权重wsk的计算如式(2)所示:
|
(2) |
根据递推关系可求得其他指标的主观权重,如式(3)所示:

|
(3) |
得到基于该专家打分的各指标的主观权重wsk={ws1, ws2.ws3, …, wsm}。
最后对各位专家打分求取的权重求均值,得到最终权重。
1.2.2 CRITIC法CRITIC法相比于熵值法考虑了评价指标的冲突性和对比程度[21],即通过计算评价指标的标准差与相关系数确定权重,具体包含以下步骤。
(1) 无量纲化处理
由于评价指标单位不同,且在评价过程中会出现正向指标和负向指标,需要进行无量纲化处理,对于指标值越高越好的正向指标采用式(4)进行处理,对于指标值越低越好的负向指标采用式(5)进行处理。
|
(4) |
|
(5) |
式中,Xik为指标Xk第i个原始实测数据;xik为Xik无量纲化处理后的数据。
(2) 计算各指标标准差
|
(6) |
式中,xk为指标Xk的实测数据的平均值;n为指标Xk的实测数据的数量;σk为指标Xk的实测数据的标准差。
(3) 构建相关系数矩阵
计算m个指标的相关系数qkj为指标Xk与指标Xj的线性相关系数,xj为指标xj的实测数据的平均值,如式(7)所示:
|
(7) |
(4) 计算各指标信息量
各指标的信息量Ck计算如式(8)所示:
|
(8) |
式中, Ck为指标Xk所包含的信息量。信息量越大,该指标在整个评价指标体系中的作用越大,权重则越大。
(5) 计算客观权重
客观权重的wok计算如式(9)所示。经计算得到各指标的客观权重wok={wo1, wo2, wo3, …, wom}。
|
(9) |
得到主观权重wsk和客观权重wok后,根据乘法合成归一法,如式(10)所示,计算得到组合权重Wk={W1, W2, …, Wm}。
|
(10) |
模糊综合评价法[22]根据数学模型的隶属度理论,将定性分析转化为定量分析,具体步骤如下:
(1) 建立模糊集合
首先确定评价对象的因素集U={u1, u2, …, um},即该层次有m个评价指标。
其次建立综合评价的评价集V={v1, v2, …, vl},即对每一个指标所处状态的l种评价。评价集是评价者对评价对象可能做出的评价结果的合集,也就是评价等级。
(2) 确定相对隶属度矩阵
将n个评价对象、m个评价指标的实测数据,进行无量纲化处理,正向指标以原始数据除以最大值,负向指标以最小值除以原始数据,得到相对隶属度矩阵R,如式(11)所示:
|
(11) |
(3) 模糊综合评价
将组合权重集Wk={W1, W2, …, Wm}与相对隶属度矩阵R合成,得到各指标的模糊综合评价模型E,如式(12)所示:
|
(12) |
百分制下的综合得分S由S=100E计算得到。
2 综合评价方法在车辆智能换道避障中的应用以两台不同厂家生产的重型卡车的试验样车C1,C2为例,应用车辆智能换道避障功能评价指标体系和基于组合赋权的模糊综合评价方法对其功能进行评价。两车的试验车速均为60 km/h,天气干燥,没有降雨、降雪等情况,试验温度20 ℃,水平方向上的能见度不低于1 km,风速0.8 m/s,已获得两车在直道换道避障工况、左弯道向左换道避障工况和左弯道向右换道避障工况的各评价指标的测试数据。两台试验样车在3种工况下均安全避开障碍物,C1的最大横向加速度、平均横向加速度、换道避障准备时间均大于C2,C2的换道避障全程时间长于C1。C1,C2在与弯道同向测试工况中的最大横向加速度和平均横向加速度最大,在与弯道反向测试工况中准备时间最长,在直道测试工况中全程时间最长。
2.1 改进G1法计算主观权重邀请3位道路运输车辆技术领域相关专家,根据各自的知识、经验、打分标准对车辆智能换道避障功能各项指标的重要程度进行打分,按照改进G1法,经式(1)~(3)计算得到各指标的主观权重如表 3所示。综合3位专家的打分,由上至下各层的重要程度由重到轻排序如下:直道换道避障、弯道换道避障;与弯道同向、与弯道反向;换道避障全程时间、换道避障准备时间、最大横向加速度、换道避障动作流畅性、平均横向加速度;换道避障全程时间、换道避障准备时间、最大横向加速度、平均横向加速度、换道避障动作流畅性;换道避障全程时间、最大横向加速度、换道避障准备时间、平均横向加速度、换道避障动作流畅性。
| 评价指标 | 基于专家打分权重 | 主观权重wsk | ||
| 专家1 | 专家2 | 专家3 | ||
| A1 | 0.533 | 0.556 | 0.444 | 0.511 |
| A2 | 0.467 | 0.444 | 0.556 | 0.489 |
| A21 | 0.529 | 0.528 | 0.514 | 0.524 |
| A22 | 0.471 | 0.472 | 0.486 | 0.476 |
| B11 | 0.122 | 0.257 | 0.205 | 0.195 |
| B12 | 0.271 | 0.200 | 0.128 | 0.200 |
| B13 | 0.193 | 0.171 | 0.205 | 0.190 |
| B14 | 0.221 | 0.143 | 0.257 | 0.207 |
| B15 | 0.193 | 0.229 | 0.205 | 0.209 |
| B21 | 0.129 | 0.200 | 0.228 | 0.186 |
| B22 | 0.253 | 0.257 | 0.101 | 0.204 |
| B23 | 0.197 | 0.171 | 0.215 | 0.194 |
| B24 | 0.224 | 0.143 | 0.253 | 0.207 |
| B25 | 0.197 | 0.229 | 0.203 | 0.210 |
| B26 | 0.134 | 0.200 | 0.217 | 0.184 |
| B27 | 0.251 | 0.257 | 0.120 | 0.209 |
| B28 | 0.196 | 0.171 | 0.217 | 0.195 |
| B29 | 0.223 | 0.143 | 0.241 | 0.202 |
| B30 | 0.196 | 0.229 | 0.205 | 0.210 |
2.2 CRITIC法计算客观权重
将原始测试数据进行无量纲化处理。其中换道避障动作流畅性为正向指标,按照式(4)进行处理;最大横向加速度、平均横向加速度、换道避障准备时间、全程时间为负向指标,按照式(5)进行处理。最后得到3种测试工况下的标准化矩阵分别如式(13)~(15)所示。
|
(13) |
|
(14) |
|
(15) |
在Python中,按照CRITIC法,经式(6)~(9)计算求取各指标客观权重如表 4所示。
| 评价指标 | 主观权重wsk | 客观权重wok | 组合权重Wk |
| A1 | 0.511 | 0.526 | 0.537 |
| A2 | 0.489 | 0.474 | 0.463 |
| A21 | 0.524 | 0.479 | 0.503 |
| A22 | 0.476 | 0.521 | 0.497 |
| B11 | 0.195 | 0.160 | 0.156 |
| B12 | 0.200 | 0.247 | 0.246 |
| B13 | 0.190 | 0.193 | 0.182 |
| B14 | 0.207 | 0.194 | 0.201 |
| B15 | 0.209 | 0.206 | 0.215 |
| B21 | 0.186 | 0.154 | 0.142 |
| B22 | 0.204 | 0.263 | 0.267 |
| B23 | 0.194 | 0.193 | 0.187 |
| B24 | 0.207 | 0.194 | 0.199 |
| B25 | 0.210 | 0.196 | 0.205 |
| B26 | 0.184 | 0.161 | 0.147 |
| B27 | 0.209 | 0.256 | 0.266 |
| B28 | 0.195 | 0.193 | 0.187 |
| B29 | 0.202 | 0.190 | 0.191 |
| B30 | 0.210 | 0.200 | 0.209 |
2.3 组合权重
根据式(8),计算出本实例中各指标组合权重如表 4所示。
2.4 模糊综合评价从指标层开始逐层向上评价,以“直道换道避障”要素层的指标层为例。“直道换道避障”要素层的指标层共有5项评价指标,因素集U={u11, u12, u13, u14, u15},以“优秀,良好,一般,合格,不合格”作为评价集的元素,评价集V={v1, v2, v3, v4, v5},评价等级划分情况如表 5所示。若得分低于60分,则评价对象被评为“不合格”,该车辆不具备智能换道避障功能,不能安全躲避障碍物;若得分高于60分,则评价对象具备智能换道避障功能,并将得分按10分为一个区间划分为4个等级,得分由低到高分别为“合格”“一般”“良好”“优秀”,得分越高,车辆该功能表现越好。
| 评价等级 | 得分S区间 |
| 优秀 | [90, 100] |
| 良好 | [80, 90) |
| 一般 | [70, 80) |
| 合格 | [60, 70) |
| 不合格 | [0, 60) |
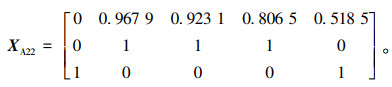
将两台样车的测试数据及各指标的限值作为原始数据矩阵,第1,2列分别为两台样车的指标测试数据,第3列为指标限值,进行无量纲化处理后,得到相对隶属度矩阵RA1,如式(16)所示。
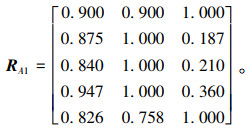
|
(16) |
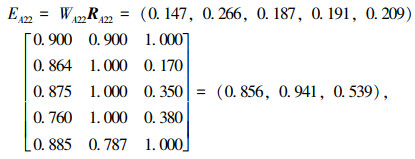
按照式(12),得到该层级的综合评价结果,如式(17)所示:
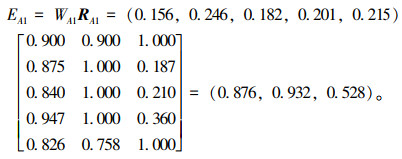
|
(17) |
同理,可以得到其他层次的评价结果,“与弯道同向换道避障”“与弯道反向换道避障”“弯道换道避障”“智能换道避障功能”的评价结果分别如式(18)~(21)所示:
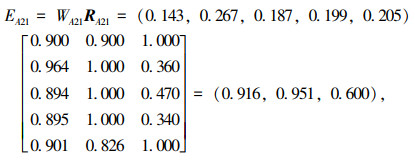
|
(18) |
|
(19) |
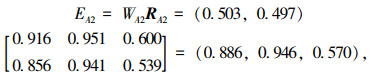
|
(20) |
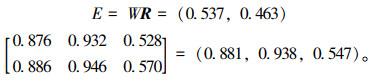
|
(21) |
基于上述综合评价方法,得到C1,C2两台测试车辆的综合评价结果如表 6所示。评价结果可以直观地看到两台车在不同工况下的测试结果,两车均具有智能换道避障功能,能够在不同工况下识别前方影响通行的障碍物,并实现安全换道避障。C2的各项测试工况得分均大于90分,明显优于C1,评价结果为优秀,说明C2的智能换道避障功能表现比C1好。C1仅在与弯道同向换道避障工况中表现优秀,其他工况表现良好,其中与弯道反向换道避障工况得分最低,需要继续针对直道和与弯道反向测试工况的表现,对智能避障功能进行相应改进。C2在直道工况下得分最低,说明相比于弯道工况,C2在直道工况下的表现稍差。
| 工况 | C1 | C2 |
| 与弯道同向换道避障得分(A21) | 91.6 | 95.1 |
| 与弯道反向换道避障得分(A22) | 85.6 | 94.1 |
| 直道换道避障得分(A1) | 87.6 | 93.2 |
| 弯道换道避障得分(A2) | 88.6 | 94.6 |
| 总分 | 88.1 | 93.8 |
| 评价等级 | 良好 | 优秀 |
基于组合赋权的模糊综合评价法对车辆智能换道避障功能进行综合评价,得到的综合评价结果与实际测试结论相符。结合实测数据和各指标权重可以发现,C2在换道避障时所用全程时间相比于C1较长,但由于权重未占很高的比重,故没有影响最终评价结果。C1虽然在与弯道同向换道避障工况中得分较高,但由于弯道工况权重小,且其他工况得分低,故总分仍旧较低。指标层的所有指标中,最大横向加速度权重最高,说明了在智能换道避障过程中平顺性的重要程度,车辆应使横向加速度保持较小值,进而保证车辆的平顺性。
4 结论为了对无人驾驶车辆的智能换道避障功能进行综合评价,按测试工况分类,首先构建了车辆智能换道避障功能评价指标体系,接着基于改进G1法和CRITIC法,通过乘法合成归一求取组合权重,并建立模糊综合评价模型。最后,以两台智能营运车辆在3种工况下的测试数据进行验证。结果表明,基于组合赋权的模糊综合评价方法可以为车辆智能换道避障功能提供全面、科学、合理的评价结果,与单一赋权方法相比,既减少了专家经验的强主观性影响,又防止了客观数据脱离实际的可能性,评价结果可以为车辆智能换道避障功能的改进提供依据。
后续还需要进一步研究车辆智能借道避障综合评价方法,与智能换道避障综合评价方法形成针对车辆智能避障功能的综合评价方法;随着车辆智能技术的不断发展,测试工况和指标仍需要进一步研究,提升综合评价方法的全面性。
| [1] |
冯屹, 王兆. 自动驾驶测试场景技术发展与应用[M]. 北京: 机械工业出版社, 2020. FENG Yi, WANG Zhao. Development and Application of Automated-driving Test Scenario Technology[M]. Beijing: China Machine Press, 2020. |
| [2] |
曹小龙. 武警交通部队应急救援装备保障能力综合评价研究[D]. 西安: 长安大学, 2016. CAO Xiao-long. Research on Comprehensive Evaluation for Emergency Rescue Equipment Support Ability of Armed Police Traffic[D]. Xi'an: Chang'an University, 2016. |
| [3] |
MAMAT T N A R, SAMAN M Z M, WAHAB D A, et al. Development of a Performance Evaluation Tool for End-of-life Vehicle Management System Implementation Using the Analytic Hierarchy Process[J].
Waste Management & Research, 2018, 36(12): 1210-1222.
|
| [4] |
张庆东, 蒋晓瑜. 一种基于德尔菲法和模糊综合评价的侦察装备运用效能评估方法[J]. 信息通信, 2020(11): 161-163. ZHANG Qing-dong, JIANG Xiao-yu. Evaluation of Reconnaissance Equipment Utilization Efficiency Based on Delphi Method and Fuzzy Comprehensive Evaluation[J]. Information & Communications, 2020(11): 161-163. DOI:10.3969/j.issn.1673-1131.2020.11.056 |
| [5] |
GU Y, XIE J, LIU H, et al. Evaluation and Analysis of Comprehensive Performance of a Brake Pedal Based on an Improved Analytic Hierarchy Process[J].
Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2021, 235(9): 2636-2648.
DOI:10.1177/0954407020987735 |
| [6] |
闫成勇, 章文俊, 尹建川, 等. 基于主成分分析的船舶操纵性综合评价[J]. 上海海事大学学报, 2020, 41(2): 11-15. YAN Cheng-yong, ZHANG Wen-jun, YIN Jian-chuan, et al. Comprehensive Evaluation of Ship Maneuverability Based on Principal Component Analysis[J]. Journal of Shanghai Maritime University, 2020, 41(2): 11-15. DOI:10.13340/j.jsmu.2020.02.003 |
| [7] |
田水承, 薛明月, 李广利, 等. 基于因子分析法的矿工不安全行为影响因素权重确定[J]. 矿业安全与保, 2013, 40(5): 113-116, 123. TIAN Shui-cheng, XUE Ming-yue, LI Guang-li, et al. Weight Determination of Miners' Unsafe Behavior Influencing Factors Based on Factor Analysis[J]. Mining Safety & Environmental Protection, 2013, 40(5): 113-116, 123. |
| [8] |
徐娟. 基于熵值法的物流业高质量发展评价指标体系构建[J]. 物流科技, 2021, 44(3): 6-10. XU Juan. Construction of Evaluation Index System for High Quality Development of Logistics Industry Based on Entropy Method[J]. Logistics Sci-Tech, 2021, 44(3): 6-10. DOI:10.3969/j.issn.1002-3100.2021.03.003 |
| [9] |
路鹏飞, 邹博松, 李京泰. 基于CRITIC法和熵值法的智能网联汽车信息安全综合评价方法研究[J]. 网络空间安全, 2020, 11(10): 98-103. LU Peng-fei, ZOU Bo-song, LI Jing-tai. A Methodology for Cyber Security Quantitative Assessment of Intelligent Connected Vehicles Based on CRITIC and Entropy Method[J]. Cyberspace Security, 2020, 11(10): 98-103. DOI:10.3969/j.issn.1674-9456.2020.10.018 |
| [10] |
DONG F, ZHAO Y N, GAO L. Application of Gray Correlation and Improved AHP to Evaluation on Intelligent U-turn Behavior of Unmanned Vehicles[C]// 2015 8th International Symposium on Computational Intelligence and Design (ISCID). Hangzhou: IEEE, 2016: 25-29.
|
| [11] |
张学显, 刘伟, 余彪, 等. 数据驱动的智能车辆目标检测能力测试评价方法[J]. 计算机系统应用, 2017, 26(11): 249-253. ZHANG Xue-Xian, LIU Wei, YU Biao, et al. Data Driven Test and Evaluation Method for Intelligent Vehicle Object Detection Capability[J]. Computer Systems & Applications, 2017, 26(11): 249-253. |
| [12] |
DU F, ZHAO Y, GAO L, et al. Evaluation of the Autonomous Parking System Based on BP Neural Network[C]// 2017 9th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC). Hangzhou: IEEE, 2017: 324-327.
|
| [13] |
MAO X H, FEI L P, SHANG X P, et al. A Fuzzy Evaluation Method of Road Vehicle Automatic Weighing Instrument in Dynamic Force Metrological Performance[J].
International Journal of Applied Electromagnetics and Mechanics, 2020, 64(1/2/3/4 Pt. 2): 1365-1372.
|
| [14] |
SUN Y, YANG H, MENG F. Research on an Intelligent Behavior Evaluation System for Unmanned Ground Vehicles[J].
Energies, 2018, 11(7): 1764.
DOI:10.3390/en11071764 |
| [15] |
ZHAO Y N, MENG K W, GAO L. The Entropy-cost Function Evaluation Method for Unmanned Ground Vehicles[J].
Mathematical Problems in Engineering, 2015, 2015: 410796.
|
| [16] |
HUANG W L, WEN D, GENG J, et al. Task-specific Performance Evaluation of UGVs: Case Studies at the IVFC[J].
IEEE Transactions on Intelligent Transportation Systems, 2014, 15(5): 1969-1979.
|
| [17] |
李茹, 马育林, 田欢, 等. 基于熵值和G1法的自动驾驶车辆综合智能定量评价[J]. 汽车工程, 2020, 42(10): 1327-1334. LI Ru, MA Yu-lin, TIAN Huan, et al. Comprehensive Intelligent Quantitative Evaluation of Autonomous Vehicle Based on Entropy and G1 Methods[J]. Automotive Engineering, 2020, 42(10): 1327-1334. |
| [18] |
肖白, 李攀攀, 姜卓, 等. 基于梯级组合评分的农村电网精益化改造方法[J]. 电力系统自动化, 2020, 44(3): 220-228. XIAO Bai, LI Pan-pan, JIANG Zhuo, et al. Lean Transformation Method for Rural Electric Power Grid Based on Cascaded Combination Scoring Enhanced Publishing[J]. Automation of Electric Power Systems, 2020, 44(3): 220-228. |
| [19] |
杨洋, 黄德镛, 耿元玲, 等. 基于FAHP-CRITIC组合赋权的采矿方法优选[J]. 化工矿物与加工, 2022, 51(1): 6-11, 22. YANG Yang, HUANG De-yong, GENG Yuan-ling, et al. Optimization of Mining Methods Based on FAHP-CRITIC Combined Weighting Process[J]. Industrial Minerals & Processing, 2022, 51(1): 6-11, 22. |
| [20] |
中国智能交通产业联盟, 道路运输装备科技创新联盟. 中国营运车辆智能化运用发展报告(2020)[M]. 北京: 人民交通出版社, 2020. China lTS Industry Alliance, Road Transport Equipment Science and Technology Innovation Alliance. Report on Development of Intelligent Commercial Vehicles in China(2020)[M]. Beijing: China Communications Press, 2020. |
| [21] |
伍小沙, 田世祥, 袁梅, 等. 基于主客观赋权VIKOR法的煤矿智能化评价研究[J]. 矿业研究与发, 2021, 41(4): 165-169. WU Xiao-sha, TIAN Shi-xiang, YUAN Mei, et al. Research on Coal Mine Intelligent Evaluation Based on Subjective and Objective Weighting VIKOR Method[J]. Mining Research and Development, 2021, 41(4): 165-169. |
| [22] |
王国娟, 吕文红, 付守艳, 等. 基于层次分析法的商业区路内停车管理水平评价[J]. 科学技术与工程, 2020, 20(21): 8810-8816. WANG Guo-juan, LÜ Wen-hong, FU Shou-yan, et al. Evaluation of On-street Parking Management Level in Commercial District Based on Analytic Hierarchy Process[J]. Science Technology and Engineering, 2020, 20(21): 8810-8816. |