 2022, Vol. 39
2022, Vol. 39扩展功能
文章信息
- 张柯娜, 王来军, 洪中荣
- ZHANG Ke-na, WANG Lai-jun, HONG Zhong-rong
- 考虑前后不对称网联多车跟驰模型及数值仿真
- Connected and Automated Multi-vehicle Following Model and Numerical Simulation Considering Front and Rear Asymmetry
- 公路交通科技, 2022, 39(12): 139-148
- Journal of Highway and Transportation Research and Denelopment, 2022, 39(12): 139-148
- 10.3969/j.issn.1002-0268.2022.12.017
-
文章历史
- 收稿日期: 2021-12-07




随着中国新一代信息通信技术的发展,车与车、车与路、车与人通过云平台达到了全方位的网络连接[1]。车辆可以利用自身的传感技术获取整个车队中关于其他车更具体、更精确的交通运行数据,并借助现代智能信息处理技术实现车辆智能化控制,在提高交通运行效率的同时,保障了车辆的安全[2]。基于车联网技术的发展,如何提高交通流运行稳定性和缓解交通拥堵,已经成为智能交通领域研究的重点[3]。
国内外研究主要从涉及混行交通运行状态[4-7]、基于不同应用环境[8-9]、参数拟合[10-11]、引入多车不同信息[12-15]等方面改进模型。宗芳等[4]提出考虑前后多辆车跟驰模型,在不同比例混行交通状态下分析模型的特点。结果表明:网联车辆比例越高,车队整体恢复至平稳状态的时间越短,波动幅度越小。洪家乐等[7]提出了耦合传统车-网联车的网联跟驰模型。结果表明:所建模型基于微观建模机理和人因角度,减少网联车辆跟驰过程中的速度波动。张志勇等[9]考虑侧向前车影响改进车辆跟驰模型,但其并未考虑多辆前后车信息。结果表明:考虑侧向间距和前车运动信息能有效增强交通流的稳定性。邓红星等[10]利用实车数据对加速度敏感系数进行标定,以改进智能驾驶模型(AIDM)。结果表明:引入加速度差能够抑制交通拥堵。Zong等[11]通过考虑多辆前后车信息改进智能驾驶模型(IDM),得到了模型中相关参数的最优值。结果表明:模型的加速过程比减速过程更快也更加平稳。LI等[12]提出考虑多前车车头间距、速度差和加速度差以改进传统跟驰模型。结果表明:提出MHVAD模型的动态性能优于FVD模型和FVAD模型。徐桃让等[13]研究智能网联车与人工驾驶车辆反应时间差异对交通流特性的影响。结果表明:反应时间对通行能力具有消极作用。安树科等[14]通过引入车头间距反馈信息,提出了考虑前方多辆车优化速度信息的改进模型。结果表明:当跟驰车辆数不变时,通过拓展跟驰车辆的信息维度,可以提高交通流稳定性。
综上所述,目前缺乏前后车数量对交通流稳定性影响的研究。主要表现在两个方面,一方面改进模型中考虑的前后车数量过少,以往论文中考虑的车辆数量信息为3 veh;另一方面鲜有文献研究跟驰车辆受前后车数量变化的影响。本研究基于车联网环境,给定跟驰车数为10 veh,通过改变跟驰模型中前后车数量推导AMFR-CAV模型,利用MATLAB对起步、减速、交通流演化过程的交通特性进行数值仿真,对比分析车队中跟驰车辆基于自身位置的改变,不同前后车数量对交通流稳定性产生的影响。通过数值仿真,对比模型跟驰特性参数变化曲线,验证了模型的合理性,为未来网联车的智能跟驰决策应如何考虑跟驰车辆数提供相关参考。
1 AMFR-CAV跟驰模型的建立1995年,Bando等[15]提出了(Optimal Velocity, OV)模型,其微分方程为:
|
(1) |
式中,vn(t)为跟驰模型中第n辆车的速度;Δxn(t)=xn+1(t)-xn(t)为第n辆车(跟驰车)与第n+1辆车(前车)的车间距;V(Δxn)为期望速度函数。
1998年,Helbing和Tilch[16]根据实测数据提出V(Δxn)函数:

|
(2) |
式中,V1=6.75 m/s,V2=7.91 m/s,C1=0.13 m-1,lc=5 m,C2=1.57。
由式(2)可知,当车间距Δxn(t)非常小时,期望速度V(Δxn)也就非常小。当V(Δxn) < vn(t)时,车辆将减速。可在实际交通中,当前车的速度比跟驰车辆速度快的多时,尽管车间距Δxn(t)很小,跟驰车辆仍会加速,OV模型中缺少前车速度的变量。
Jiang等[17]提出了全速度差模型(Full Velocity Difference, FVD),如下:

|
(3) |
式中,当前车速度大于跟驰车速,Δvn(t)为正;否则为负。FVD模型通过引入变量Δvn,模拟出符合实际堵塞情况下的车辆启动延迟时间和波速度。
以往的研究基于人对驾驶环境的感知有限性,对前后车距离、速度、加速度变化的敏感性因人而异,跟驰模型中可考虑的前车数量最多为2 veh,后车数量为1 veh。基于CAV环境,跟驰车辆可以通过传感器探测紧邻前后车辆的位置和运动状态,CAV与CAV之间通过通信设备交流,从而使跟驰车辆获得前后多车的位置和运动状态,实现网联式驾驶辅助功能[18]。当前基于CAV环境的研究只限于通过引入多前后车辆信息,探究模型对交通流稳定性的影响。本研究根据实际情况,当CAV跟驰车辆可获取前后车数量信息一定时,探究不同的前后车数量对交通流稳定性的影响。现存文献基于传统模型中认为引入前车数量越多,曲线脉动幅度越小,交通流稳定性越好[9-10],缺乏在CAV环境中验证此结论。
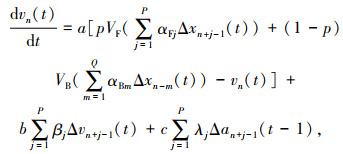
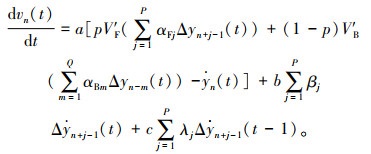
因此本研究结合FVD模型[17],孙棣华等[19]提出的考虑后视效应和速度差信息(BLVD)的跟驰模型、宗芳等[4]提出的考虑前后多车信息的混行跟驰模型(Multi-Front and Rear Headway Velocity and Acceleration Difference, MFRHVAD),基于CAV提出考虑多车头间距Δxn(t)、速度差Δvn(t)和加速度差Δan(t)的前后不对称网联多车跟驰模型(AMFR-CAV):
|
(4) |
式中,a,b,c分别为网联车的期望函数敏感系数、速度差敏感系数与加速度差敏感系数,这里a=1.05,b=0.2,c=0.1[4]。由于跟驰车辆受前方车辆的影响程度比受到后方车辆的影响程度小,p为前车期望速度函数权重取值0.9,则后车期望速度函数权重取值0.1[19]。VF为前车的期望速度;VB为后车的期望。j为相对跟驰车辆的第前j辆车;m为相对跟驰车辆的第后m辆车;Δxn+j-1为前j辆车与前j+1辆车的车头间距;Δxn-m为后m辆车与后m+1辆的车头间距;Δvn为第n+1辆车(前车)与第n辆车后车的速度差;Δan(t)为第n+1辆车(前车)与第n辆车后车的加速度差;αFj为对Δxn+j-1的权重;αBm为对Δxn-m的权重;βj为Δvn速度差的权重;λj为Δan(t)加速度差的权重。因为
|
(5) |
式中P为模型中考虑的前车数量。
|
(6) |
式中Q为模型中考虑的后车数量,且P+Q=10。
AMFR-CAV模型中前车、后车期望速度函数如式(7)、式(8),式中相关参数采用参考文献[1, 5]。

|
(7) |

|
(8) |
假设车辆的车头间距均为B=L/N,对应的优化速度为V(B)。此时稳态的交通流车辆位置如式(9):

|
(9) |
加一扰动yn(t)=e(ikn+zt)后可得第n辆车的位置及第n辆车的跟驰距离为:

|
(10) |

|
(11) |
对式(11)进行求导得:

|
(12) |
对式(12)进行求导得:

|
(13) |
由此可得:
|
(14) |

|
(15) |
将方程(4)线性化可得:
|
(16) |
因为扰动yn(t)=e(ikn+zt)则ẏn(t)=ze(ikn+zt),Δyn(t)=e(ik(n+1)+zt)-e(ikn+zt)=e(ikn+zt)(eik-1),Δẏn(t)=ze(ikn+zt)(eik-1),Δÿn(t)=z2e(ikn+zt)(eik-1)。所以式(16)可展开为:
|
(17) |
对于eik进行泰勒二阶展开式可得eik=1+ik+

|
(18) |
|
(19) |
当z2>0时,受到yn扰动的交通流会逐渐恢复至原始的稳定状态。所以模型保持稳定状态的条件分别为:

|
(20) |
为研究AMFR-CAV模型稳定性的优劣程度,利用MATLAB绘制另4种参考模型的中性稳定性曲线并与AMFR-CAV模型进行对比。其稳定性临界曲线由图 1(a)可见,随着模型引入车辆数量增加,模型的稳定性越好,为保持车辆数量信息的一致性,MFRHVAD模型中前后车数量为3 veh,AMFR-CAV模型的前车数量为2, 后车数量为4 veh;当MFRHVAD模型中跟驰车辆总数为10 veh时,不同前后跟驰车辆数的稳定性临界曲线如图 1(b)所示。

|
| 图 1 车头间距与敏感度稳定性临界曲线 Fig. 1 Critical curves of headway and sensitivity stability |
| |
由图 1(a)可知,5种模型的不稳定性区域面积排序为: AMFR-CAV < MFRHVAD < BLVD < FVD < OV,前、后车车头间距、速度差、加速度差信息使得模型的稳定性大大提高。当引入车辆数量一定时,AMFR-CAV模型比MFRHVAD模型交通流的稳定性更好,图 1(b)可知,当车辆信息数量一定时,前车数量(P)的减少可以使模型的稳定性增大。
3 数值仿真与模型验证跟驰车队共10辆车,其中头车编号为1,初始位置为0 m,AMFR-CAV模型跟驰车辆引入的前后车辆数如表 1所示,车头间距为7.4 m。MFRHVAD模型中跟驰车辆考虑前后车辆数为1 veh。跟驰车辆分别按照MFRHVAD模型和AMFR-CAV模型进行跟驰运动,仿真时间为50 s。
| 车辆编号 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 前车数量 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| 后车数量 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 |
探讨AMFR-CAV模型对交通流稳定性的改善情况。对比AMFR-CAV模型与MFRHVAD模型受到制动和起步扰动后跟驰车辆速度、加速度和位置变化曲线之间的差异。
3.1 制动过程仿真10辆车的初速度为11 m/s,头车减速度从-2.4 m/s2逐渐变为0 m/s2。两种模型下跟驰车辆的加速度、速度、位置变化曲线如图 2~4所示。这里加速度和速度的震荡体现了交通流的延迟性和不稳定性。

|
| 图 2 制动过程加速度变化 Fig. 2 Acceleration variations during braking |
| |

|
| 图 3 制动过程速度变化 Fig. 3 Speed variations during braking |
| |

|
| 图 4 制动过程位置变化 Fig. 4 Position variations during braking |
| |
由图 2可知,AMFR-CAV模型的平均加速度波峰值为0.38 m/s2,显著小于MFRHVAD模型的0.71 m/s2,加速度峰谷差值较MFRHVAD模型降低43.32%,震荡时间延长51.3%,震荡时间提前16%;图 3可知,AMFR-CAV模型平均速度波峰值为2.04 m/s,显著小于MFRHVAD模型的2.66 m/s,速度峰谷差值较MFRHVAD模型降低42.43%,震荡时间延长9.3%,震荡时间提前21.7%。图 4可知,跟驰车辆经过短暂的运动后出现拥堵,随着跟驰车辆的增加,车辆的拥堵时间越长,其中AMFR-CAV模型制动效果更好,制动距离更短,跟驰间距更大,跟驰车队长度更长。
峰谷发生时间与变化值在车队中具有累计作用,比如车辆2的速度波峰时间提前1 s,车队中其后的车辆速度波峰时间跟随车辆2也提前1 s。由表 2可知,AMFR-CAV模型较MFRHVAD模型车辆编号2的震荡时间没有延长,说明增加后车数量不会增加震荡时间,随着前车数量的增加和后车数量的降低,震荡时间先减少后增加,震荡时间越短,车队的拥堵时间越短;车辆2的速度波峰提前10%,制动波速提高0.41 m/s,表明增加后车车辆信息,速度与加速度震荡更加平缓,提高交通流稳定性。车辆8的速度波峰时间提前比例最大,速度波峰发生时间越早,车队制动反应越快,制动波速传递越快。由累计作用可知,车辆2对车队中速度波峰提前比例的贡献最大,后续车辆随着跟驰引入前车数量的增加和后车数量的减少,速度波峰时间提前比例增加变缓,至车辆9速度波峰时间提前比例增加减少,车队的制动效果变差;车辆3在车队中对速度峰谷值、速度波峰值、加速度峰值、加速度谷值改善比例贡献最大,波峰值越低、波谷值越高时,跟驰车辆加速度与速度的震荡越小,交通流平稳性越高。
| 车辆编号 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 速度波峰时间提前/% | 10.00 | 13.79 | 17.95 | 22.45 | 24.14 | 25.00 | 25.64 | 25.29 | 17.24 |
| 震荡时间延长/% | 0.00 | 21.88 | 9.52 | 1.92 | 7.69 | 12.99 | 17.78 | 18.87 | 12.21 |
| 速度峰谷值提高/% | 1.02 | 61.57 | 98.37 | 143.47 | 180.50 | 190.37 | 162.02 | 110.90 | 63.48 |
| 速度波峰值降低/% | 4.45 | 20.43 | 27.79 | 32.46 | 34.37 | 34.58 | 33.71 | 32.22 | 30.68 |
| 加速度峰值降低/% | 19.05 | 60.12 | 53.62 | 55.94 | 57.83 | 58.81 | 58.72 | 57.82 | 56.70 |
| 加速度谷值提高/% | 6.38 | 40.98 | 51.02 | 59.16 | 63.27 | 64.93 | 64.78 | 63.71 | 61.90 |
由制动过程可知:当加速度、速度波峰值降低或波谷值提高时,跟驰车辆震荡时间变长,故认为车辆震荡时间与速度、加速度的波峰、波谷值之间相互制约,不可同时改善。
3.2 起步过程仿真10辆车的初速度为0 m/s,头车加速度从2.4 m/s2降低至0 m/s2。两种模型下跟驰车辆的加速度、速度、位置变化曲线如图 5~7所示。

|
| 图 5 起步过程加速度变化 Fig. 5 Acceleration variations during starting |
| |

|
| 图 6 起步过程速度变化 Fig. 6 Speed variations during starting |
| |

|
| 图 7 起步过程位置变化 Fig. 7 Position variations during starting |
| |
由图 5可知,MFRHVAD模型跟驰车辆的加速度峰值依次增加,而AMFR-CAV模型第3辆车加速度峰值发生异变,加速度峰值小于第2辆车,在文献[4]图中也出现过类似情况,但并未发现4~10 veh跟驰车辆的加速度峰值依然增加。加速度峰值越高,车队中产生的扰动越强,车辆3加速度峰值的降低,降低了交通流的扰动强度,增强了交通流的稳定性。AMFR-CAV模型较MFRHVAD加速度平均波峰值降低28.54%,加速度波峰平均时间提高6.76%,表明考虑多车信息在提高扰动波速的同时,降低了扰动强度。图 6可知,基于跟驰车辆的延迟性,在起步开始阶段速度变化程度很小,AMFR-CAV模型速度平均延迟时间降低30.27%。图 7可知,AMFR-CAV较MFRHVAD模型起步时间减少,且第50 s第10辆跟驰车辆的位置提前1.29 m。
由表 3可知,AMFR-CAV模型跟驰车辆的延迟性从第4辆车开始,较MFRHVAD模型提前两辆车。随着前车数量的增加,速度延迟时间比率降低。速度延迟时间越长,模型起步反应速度越慢。由累计效果可知,车辆编号3在车队里对加速度波峰、加速度波峰时间的改善比例最大。加速度波峰时间越早,速度延迟时间越短,模型起步反应速度越快,跟驰间距更短,跟驰车队更短。
| 车辆编号 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 速度延迟时间降低/% | 100.00 | 100.00 | 61.76 | 44.23 | 34.78 | 29.07 | 24.27 | 20.17 | 17.65 |
| 加速度峰值时间提前/% | -2.56 | 7.02 | 6.76 | 6.67 | 7.48 | 8.06 | 7.14 | 7.01 | 6.94 |
| 加速度峰值降低/% | 2.08 | 30.80 | 32.51 | 33.61 | 33.33 | 32.32 | 30.86 | 29.06 | 28.10 |
3.3 交通流演化过程仿真
在周期性边界条件下,分析AMFR-CAV模型的交通流受到扰动后的演化过程,验证了AMFR-CAV模型对干扰作用的抑制性。车辆数N=100等间距依次排列在长度L=1 500 m的环形道路上,等车辆运行状态稳定后,对车辆编号1施加微小扰动r,即:

|
(21) |

|
(22) |
|
(23) |
模型其他参数取值xn(0)(t)为第t秒第n辆车的稳定状态; V(Δxn)为优化速度函数,头车的初始速度为v1(1)=3.9 m/s。由起步过程与制动过程仿真结果可知车辆编号2和车辆编号3各参数改善情况较好。为验证模型稳定性并求得模型受到扰动时引入的前后车数量与稳定性的关系,AMFR-CAV模型中取(P=1,Q=9), (P=2,Q=8), (P=3,Q=7), (P=4,Q=6), (P=5,Q=5), (P=6,Q=4),分析车辆速度和加速度随交通流的仿真演化结果。AMFR-CAV模型对交通流有很强的致稳能力,在微小扰动下,交通流在较短时间内已经达到稳定状态,所以加速过程取r=7 m,减速过程取r=-7 m。
由图 8可知,在扰动经过300 s后,AMFR-CAV模型中除P=1,Q=9以外,其余情况速度的波动范围已经非常小,基本在3.73 m/s上下波动,说明当跟驰模型引入前车数量大于2时,模型受到扰动后,有很强的修复扰动能力,交通流能够在很短时间回到稳定状态。扰动经过1 000 s后,比扰动经过300 s的速度波动范围更小。这说明随着时间的增大,扰动会逐渐消失,证实模型对扰动在交通流的传播过程中具有抑制作用。

|
| 图 8 车辆速度分布 Fig. 8 Vehicle speed distributions |
| |
由图 8和图 9可知,减速过程速度与加速度幅值变化范围为:(P=2,Q=8) < (P=3,Q=7) < (P=4,Q=6) < (P=5,Q=5) < (P=6,Q=4) < (P=1,Q=9);加速过程速度与加速度幅值变化范围为:(P=3,Q=7) < (P=2,Q=8) < (P=4,Q=6) < (P=5,Q=5) < (P=6,Q=4) < (P=1,Q=9),表明当引入前后车数量一定且前车数量大于2时,考虑前车数量越多,曲线的脉动幅度越大,而现存文献中认为引入前车数量越多,曲线脉动幅度越小,交通流稳定性越好[9-10]。本研究中模拟结果表明:在减速过程,P=2,Q=8的交通流稳定性最好,在加速过程中P=3,Q=7的交通流稳定性最好,证实了跟驰模型并非前车数量考虑越多,交通流稳定性越好。由加速过程与减速过程对比可知AMFR-CAV模型减速过程震荡幅值小于加速过程,交通稳定性更好。

|
| 图 9 车辆加速度分布图 Fig. 9 Vehicle acceleration distributions |
| |
4 结论
(1) 在网联环境下考虑不同前后车辆数量对跟驰车辆的影响,给定前后总车数量为10 veh,通过改变跟驰车辆引入的前后车辆数量,构建了不对称网联多车跟驰模型,并求得减速过程最优稳定状态的前后车数量关系为P=2,Q=8,加速过程为P=3,Q=7。提出模型引入车辆信息一定时,并非前车数量考虑越多,交通流稳定性越好。
(2) 仿真结果表明:制动过程中,车辆震荡时间与速度、加速度的波峰、波谷值之间相互制约,不可同时改善,其中车辆2的震荡时间降低比例最高,车辆3的加速度与速度震荡幅值改善程度最好;起步过程中,加速度峰值发生时间与速度延迟时间之间呈负相关性,其中车辆3跟驰模型的加速度波峰降低比例、加速度波峰时间提前比例最高。交通流演化过程中,减速过程的速度曲线脉动幅度更小,交通流稳定性更好,减速过程稳定性优于加速过程。
(3) 本研究中当给定跟驰车辆数量信息改变时,最优稳定状态亦会随着改变。在今后的研究中,应从多个跟驰车辆数量信息验证模型最优稳定状态的一般规律。本次研究能够为未来汽车厂商在研发网联车跟驰模型时提供一些研究思路,为未来网联车在智能跟驰决策中如何考虑跟驰车辆数提供相关参考。
| [1] |
田野. 11部门联合发布《智能汽车创新发展战略》[J]. 智能网联汽车, 2020(2): 6-7. TIAN Ye. Eleven Departments Jointly Released Intelligent Vehicle Innovation and Development Strategy[J]. Intelligent Connected Vehicles, 2020(2): 6-7. |
| [2] |
BAHRAMI S, ROORDA M J. Optimal Traffic Management Policies for Mixed Human and Automated Traffic Flows[J].
Transportation Research Part A: Policy and Practice, 2020, 135: 130-143.
DOI:10.1016/j.tra.2020.03.007 |
| [3] |
PAPADOULI A, QUDDUS M, IMPRIALOU M. Evaluating the Safety Impact of Connected and Autonomous Vehicles on Motorways[J].
Accident Analysis & Prevention, 2019, 124: 12-22.
|
| [4] |
宗芳, 石佩鑫, 王猛, 等. 考虑前后多车的网联自动驾驶车辆混流跟驰模型[J]. 中国公路学报, 2021, 34(7): 105-117. ZONG Fang, SHI Pei-xin, WANG Meng, et al. Connected and Automated Vehicle Mixed-traffic Car-following Model Considering States of Multiple Front and Rear Vehicles[J]. China Journal of Highway and Transport, 2021, 34(7): 105-117. DOI:10.3969/j.issn.1001-7372.2021.07.009 |
| [5] |
ZHU W X, ZHANG H M. Analysis of Mixed Traffic Flow with Human-driving and Autonomous Cars Based on Car Following Model[J].
Physical A: Statistical Mechanics and Its Applications, 2018, 496: 274-285.
DOI:10.1016/j.physa.2017.12.103 |
| [6] |
陈玲娟, 孙远. 网联环境下混行车流跟驰行为及车队组建研究[J]. 武汉理工大学学报(交通科学与工程版), 2021, 45(3): 408-412. CHEN Ling-juan, SUN Yuan. Research on Car-following Behavior and Team Building of Mixed Traffic Flow under Network Connection Environment[J]. Journal of Wuhan University of Technology (Transportation Science & Engineering Edition), 2021, 45(3): 408-412. DOI:10.3963/j.issn.2095-3844.2021.03.003 |
| [7] |
洪家乐, 曲大义, 贾彦峰, 等. 智能网联混合车流的动态特性及稳态控制策略[J]. 公路交通科技, 2022, 39(3): 125-132. HONG Jia-le, QU Da-yi, JIA Yan-feng, et al. Dynamic Characteristics and Steady State Control Strategy of Intelligent Networked Mixed Traffic Flow[J]. Journal of Highway and Transportation Research and Development, 2022, 39(3): 125-132. DOI:10.3969/j.issn.1002-0268.2022.03.016 |
| [8] |
TANG T Q, YI Z Y, WANG T, et al. A Speed Guidance Strategy for Multiple Signalized Intersections Based on Car-following Model[J].
Physical A: Statistical Mechanics and Its Applications, 2018, 496: 399-409.
DOI:10.1016/j.physa.2018.01.005 |
| [9] |
张志勇, 刘振, 蒋理. 车联网环境下考虑侧向间距的跟驰模型[J]. 长沙理工大学学报(自然科学版), 2021, 18(3): 62-68. ZHANG Zhi-yong, LIU Zhen, JIANG Li. A Car-following Model Considering Lateral Gap in Vehicle Networking Environment[J]. Journal of Changsha University of Science & Technology (Natural Science Edition), 2021, 18(3): 62-68. DOI:10.3969/j.issn.1672-9331.2021.03.009 |
| [10] |
邓红星, 胡翼, 王猛. 考虑前车加速度信息的改进IDM模型研究[J]. 重庆理工大学学报(自然科学版), 2022, 36(5): 226-232. DENG Hong-xing, HU Yi, WANG Meng. An Improved Intelligent Driver Model Considering the Acceleration Information of the Front Vehicle[J]. Journal of Chongqing University of Technology (Natural Science) Edition, 2022, 36(5): 226-232. DOI:10.3969/j.issn.1674-8425(z).2022.05.028 |
| [11] |
ZONG F, WANG M, TANG M, et al. An Improved Intelligent Driver Model Considering the Information of Multiple Front and Rear Vehicles[J].
IEEE Access, 2021, 99: 66241-66252.
|
| [12] |
LI Y F, SUN D H, LI W N, et al. Model and Simulation for Microscopic Traffic Flow Based on Multiple Headway, Velocity and Acceleration Difference[J].
Nonlinear Dynamics, 2011, 66(1/2): 15-28.
|
| [13] |
徐桃让, 姚志洪, 蒋阳升, 等. 智能网联车环境下考虑反应时间影响的基本图模型[J]. 公路交通科技, 2020, 37(8): 108-117. XU Tao-rang, YAO Zhi-hong, JIANG Yang-sheng, et al. Fundamental Diagram Model of Considering Reaction Time in Environment of Intelligent Connected Vehicles[J]. Journal of Highway and Transportation Research and Development, 2020, 37(8): 108-117. |
| [14] |
安树科, 徐良杰, 钱良辉, 等. 考虑前方多车优化速度信息的车辆跟驰模型[J]. 东南大学学报(自然科学版), 2020, 50(6): 1156-1162. AN Shu-ke, XU Liang-jie, QIAN Liang-hui, et al. Car-following Model with Optimal Velocity Information of Multiple-vehicle Ahead[J]. Journal of Southeast University (Natural Science Edition), 2020, 50(6): 1156-1162. |
| [15] |
BANDO M, HASEBE K, NAKAYAMA A, et al. Dynamical Model of Traffic Congestion and Numerical Simulation[J].
Physical Review E: Statistical Physics, Plasmas, Fluids, and Related Interdisciplinary Topics, 1995, 51(2): 1035-1042.
|
| [16] |
HELBING D, TILCH B. Generalized Force Model of Traffic Dynamics[J].
Physical Review E: Statistical Physics, Plasmas, Fluids, and Related Interdisciplinary Topics, 1998, 58(1): 133-138.
|
| [17] |
JIANG R, WU Q, ZHU Z. Full Velocity Difference Model for a Car-following Theory[J].
Physical Review E: Statistical Physics, Plasmas, Fluids, and Related Interdisciplinary Topics, 2001, 64(1): 017101.
|
| [18] |
李克强, 戴一凡, 李升波, 等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报, 2017, 8(1): 1-14. LI Ke-qiang, DAI Yi-fan, LI Sheng-bo, et al. State-of-the-art and Technical Trends of Intelligent and Connected Vehicles[J]. Automotive Safety and Energy, 2017, 8(1): 1-14. DOI:10.3969/j.issn.1674-8484.2017.01.001 |
| [19] |
孙棣华, 张建厂, 赵敏, 等. 考虑后视效应和速度差信息的跟驰模型[J]. 四川大学学报(自然科学版), 2012, 49(1): 115-120. SUN Li-hua, ZHANG Jiang-chang, ZHAO Min, et al. Effect of Backward Looking and Velocity Difference in an Extended Car Following Model[J]. Journal of Sichuan University (Natural Science Edition), 2012, 49(1): 115-120. DOI:10.3969/j.issn.0490-6756.2012.01.019 |