 2022, Vol. 39
2022, Vol. 39扩展功能
文章信息
- 阴晓峰, 朱宇航, 赵小娟, 杨柯普, 李磊
- YIN Xiao-feng, ZHU Yu-hang, ZHAO Xiao-juan, YANG Ke-pu, LI Lei
- 基于5G V2X通信的车辆协同跟随控制策略研究
- Study on Cooperative Following Control Strategy for Vehicles Based on 5G V2X Communication
- 公路交通科技, 2022, 39(5): 149-156
- Journal of Highway and Transportation Research and Denelopment, 2022, 39(5): 149-156
- 10.3969/j.issn.1002-0268.2022.05.018
-
文章历史
- 收稿日期: 2020-12-17




2. 成都知行新材料技术研究有限公司, 四川 成都 611731
2. Chengdu Zhixing New Material Technology Research Co., Ltd., Chengdu Sichuan 611731, China
随着电子控制技术的发展和汽车智能化要求的提高,先进驾驶辅助系统(Advanced Driver Assistance System, ADAS)取得广泛应用。作为ADAS的典型代表,自适应巡航控制系统(Adaptive Cruise Control System,ACCS)能够通过雷达等传感器去感知行驶环境信息,并在其基础上实现车辆加速或减速控制,这在一定程度上减轻了驾驶员的工作强度[1-6]。但在车间距离较远或车辆行驶于雨雾等恶劣天气时,仅依靠传感器,车辆的环境感知能力会受到影响,这对行车安全构成了潜在的威胁。车联网技术的发展,使车辆能够通过直连或网络通信方式在恶劣天气下实现更大范围的环境感知,有效弥补了传感器环境感知能力的不足。因此,研究基于车与外界互联(Vehicle to Everything,V2X)的协同跟随控制技术,对于提高行驶安全性、行驶效率和确保交通流的稳定性,具有重要作用。
目前,国内外专家基于车车通信,利用不同的算法对车辆跟随系统控制进行了大量的研究。Hedrick等[7]使用滑模控制(Sliding Mode Control,SMC)方法构建了多车协同控制模型,前提是车车之间可建立顺畅通信,以获取前车位置、速度和加速度等信息。Xavier等[8]使用分布式PID算法,通过获取车辆前、后方相邻位置车辆行驶状态及跟随车辆的航向角信息,设计了协同驾驶控制器,并通过构建仿真模型利用MATLAB工具对车辆跟随等不同协同工况进行仿真,验证了控制效果。Amir等[9]针对模型预测控制(Model Predictive Control,MPC)进行路径跟随控制时模型复杂、计算量大的问题,提出了多个简约模型切换式的模型预测控制,每个预测模型具有不同的精度粒度,通过可调节的状态预测模型,构建了车辆可重构的预测模型,并利用机器学习方法得到参数选择算法,使运行模型始终切换到误差小计算速度快的最佳模型。He等[10]研究了车辆纵向控制,首车可将当前的车速、加速度、减速度和负载等信息,通过车车通信方式传递给后面的车辆,使后面的车辆可自动调节车速和跟车距离,防止车辆追尾,保持车队行驶的稳定性。Wang等[11]设计了一种模型匹配控制(Model Matching Control,MMC)方案,用于实现车辆跟随的速度控制,这种控制方案还建立了车辆加速度控制的传递函数,利用此传递函数建立了基于滑模控制反馈的模型匹配控制器,该控制器与传统PID的模型匹配控制器相比响应速度更快,控制性能更稳定。Shakouri等[12]设计了一种利用单个控制回路的控制方案,通过引入与前后车辆之间的相对距离和前车速度相对应的额外状态变量实现车辆速度和距离的跟踪,使得对制动和油门的控制更精准,增强了车辆行驶的安全性和稳定性。胡杰等[13]通过改进人工势场算法,将其应用到协同式自适应巡航的上层控制器中,仿真表明,该算法在纵向控制上能够平滑、准确、迅速地达到目标车速与间距。李通等[14]基于模糊PID算法设计车辆协同跟随控制策略,并通过比例模型小车进行了试验验证。Wang等[15]对比分析了PID和MPC控制算法,得出PID算法的控制效果不逊于MPC且具有快速简便的优势。
目前的车车通信主要采用专用短程通信(Dedicated Short Range Communication,DSRC),而基于5G V2X通信的协同跟随控制研究较少。基于5G的V2X通信技术,相对于DSRC而言,具有更远的有效通信距离、更低的通信延时和更高的可靠性,能够更好地获取由于恶劣天气等原因造成的传感器无法获取的信息[16-18]。因此,本研究基于5G V2X通信技术,开展车辆协同跟随控制策略研究。在集成5G V2X通信模块基础上,采用协同决策和运动控制分层控制的方法,分别设计用于协同决策层的模型预测控制算法和用于运动控制层的模糊PID控制算法,并在匀速跟随、加速跟随、他车驶入、变速跟随4种场景下对协同控制策略进行了仿真验证。
1 基于V2X的协同跟随控制系统结构基于V2X的车辆协同跟随控制系统结构如图 1所示。该系统主要由协同决策层、运动控制层、车辆状态采集模块、5G V2X通信模块组成。

|
| 图 1 基于V2X的车辆协同跟随控制系统结构 Fig. 1 Structure of vehicle cooperative following control system based on V2X |
| |
协同决策层主要由安全距离模型、车间运动学模型和模型预测控制器组成。其中,安全距离模型根据前车和主车的速度及两车的相对速度,输出期望车间距。基于车间运动学模型的模型预测控制器的输入为期望车间距与实际车间距的偏差,模型预测控制器的输出为期望加速度。
运动控制层包含驱动/制动切换模块及模糊PID控制器,其主要作用是实现对期望加速度的跟踪控制。驱动/制动切换模块首先根据协同决策层输出的期望加速度确定车辆运动控制模式,然后根据车辆运动控制模式、由模糊PID控制器输出节气门开度或制动压力的控制量至被控车辆,进而通过驱动或制动控制使车辆在规划的行驶路径上按期望状态行驶。
车辆状态采集模块根据前车5G V2X通信模块传输的速度和位置信息、自车采集的速度和位置信息,计算车间距、两车相对车速、前车加速度、主车加速度及主车加速度变化率。
5G V2X通信模块的主要作用是发送自车和接收其他车辆的速度和位置等信息,经车辆状态采集模块处理后、提供给协同决策层和运动控制层使用。
2 协同决策层 2.1 安全距离模型安全距离直接影响车辆跟随效果、道路利用率和交通流密度。非定常车间距离策略可根据本车和前车的状态来调整期望的安全车间距,对于复杂的交通环境适应性好。本研究在恒定车头时距基础上,引入前车与本车的相对速度,其安全距离模型可表达为:

|
(1) |
式中,ddes为期望车间距,表示期望的主车和前车之间的安全距离;v为主车的行驶速度;vr为主车和前车的相对速度;th1,th2均为大于0的常数;为d0两车之间最小固定距离,包括车身长度。
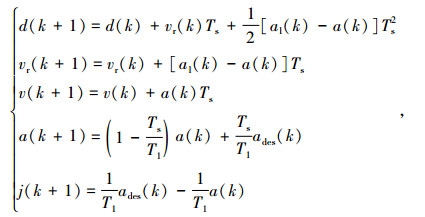
2.2 车间纵向运动学模型本研究用一阶惯性系统来描述期望加速度与实际加速度之间的对应关系[18],结合前车和主车相对运动学关系,可建立车间纵向运动学模型的离散方程如下:
|
(2) |
式中,d(k)为k时刻实际车间距,即前车与主车的间距;v(k)和vr(k)分别为k时刻主车速度、两车相对速度;Ts为系统的采样周期,取值0.01 s;ades (k),al (k),a(k)分别为k时刻期望加速度、前车加速度、主车加速度;j为主车加速度变化率;T1为一阶惯性环节的时间常数,取值为0.5。
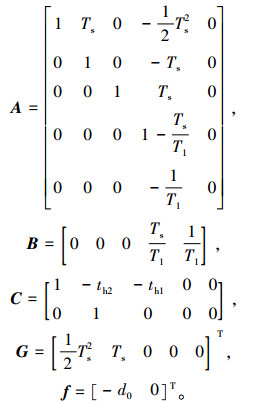
由式(2)可得纵向车间运动学模型的离散状态空间方程:

|
(3) |
式中,x(k)= [d(k), vr(k), v(k), a(k), j(k)]T为状态变量;u(k)为期望加速度ades(k);w(k)为前车加速度ap(k);y(k)= [d(k)-ddes(k), vr(k)]T;各个系数矩阵分别为
|
由式(3)可推导出从当前时刻k到预测时域p的系统状态和预测输出,其矩阵形式为:

|
(4) |
式中,Xp(k+p|k)为预测时域内的状态向量序列,Xp(k+p|k)= [xp(k+1|k), xp(k+2|k),…, xp(k+p|k)]T;Yp(k+p|k)为系统预测时域内的预测输出序列,Yp(k+p|k)=[yp(k+1|k), yp(k+2|k),…, yp(k+p|k)]T;U(k)为控制向量序列,即决策出的期望加速度,U(k)= [u(k|k), u(k+1|k),…, u(k+p-1|k)]T;W(k) 为扰动量,即前车加速度,并假定当前时刻扰动量已知,在整个控制时域内扰动量不变;F= [f, f,…, f]T;

|
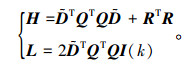
车辆协同跟随控制应实现2个方面的目标:一是实际车间距与期望车间距的偏差尽可能小且主车速度应逐渐收敛于前车速度;另一是车辆的加速度不宜过大,以获得较好的经济性和乘坐舒适性。兼顾这2方面的目标函数可表达为:

|
(5) |
Yref(k+p|k)为参考输出,Q和R为权重矩阵,Q=diag(q1, q2,…, qp),R=diag(r1, r2,…, rp)。
结合式(4),定义控制量无关向量I(k)=

|
(6) |
式中,
|
(7) |
令Ac=diag(1, 1, 1, 1, 1),可定义系统状态约束输出方程:
|
(8) |
由式(3)状态方程和式(8),可推导出从当前时刻k到预测时域p的系统状态约束输出方程:

|
(9) |
式中,
|
系统状态约束可表示为:

|
(10) |
式中,Ycmin= [ycmin, ycmin,…, ycmin]T;Ycmax= [ycmax, ycmax,…, ycmax]T;ycmin= [d0, -∞, vmin, amin, jmin]T;ycmax= [∞, ∞, vmax, amax, jmax]T;vmin,amin,amax,jmin,kp,ki,kd,ycmin,Δa分别为主车的速度、加速度、加速度变化率及系统状态约束的最小及最大值。
同理,系统控制约束可表示为:
|
(11) |
式中,
由式(9)~(11)可得系统约束方程:
|
(12) |
式中,
|
将目标函数转化为标准二次型后,结合系统约束方程,利用MATLAB工具箱可求出控制时域内的最优控制序列,即期望加速度。将决策出的第1个期望加速度作为运动控制层输入,由运动控制层完成对车辆纵向运动的控制。
3 运动控制层 3.1 运动控制层结构运动控制层的作用是快速且精确跟踪决策层输出的期望加速度,以实现车辆协同跟随控制,该层结构如图 2所示,其控制原理为:驱动/制动切换模块根据接收到的期望加速度,确定运动控制模式(即驱动/制动模式);模糊控制器根据期望加速度与实际加速度的差值及其变化率确定PID控制器的参数kp,ki,kd。在驱动模式下,PID控制器的输出为节气门开度;在制动模式下,PID控制器的输出为制动压力(制动主缸压力)。

|
| 图 2 运动控制层结构 Fig. 2 Structure of motion control layer |
| |
3.2 驱动/制动切换策略
运动控制层通过调节节气门开度或制动压力实现对车辆的驱动或制动控制。为避免驱动和制动的同时作用和频繁切换,设置大于零的阈值Δa:若期望加速度ades减去节气门开度为零时的最小加速度amin所得偏差绝对值不大于Δa,保持控制模式;若偏差大于Δa,为驱动模式;若偏小大于-Δa,为制动动模式。驱动/制动切换策略可表示为:
|
(13) |
式中Δa取值为0.05 m/s2。
3.3 模糊PID算法依据试验车的动力、整车及传动系统参数,结合制动性能要求,并兼顾经济性和乘坐舒适性,确定模糊控制器输入量期望加速度与实际加速度的差值e及其变化率ec的论域分别为[-3, 3],[-2, 2]。结合经验和反复调试,设置输出量kp,ki,kd的论域分别为[-1.3, 1.3],[-0.08, 0.08],[-1.5, 1.5]。
模糊控制器输入和输出的语言变量均设置为{NB, NM, NS, ZO, PS, PM, PB},均采用三角形隶属度函数;结合试验及经验分别建立kp,ki,kd模糊推理规则;使用重心法进行反模糊化处理,从而求出kp,ki,kd的精确值[20]。
4 仿真分析为验证基于V2X的协同跟随控制系统及其控制策略的有效性,采用MATLAB/Simulink和CarSim建立了协同跟随联合仿真模型,该仿真模型主要包括基于MPC的协同决策模块、基于模糊PID的运动控制模块和基于CarSim的车辆动力学仿真模块。使用所建立的仿真模型,在匀速跟随、加速跟随、他车驶入、变速跟随4种工况下进行了仿真验证。
(1) 匀速跟随工况
前车和主车初始间距为50 m,主车初始速度为25 m/s,前车以20 m/s的速度匀速行驶,仿真结果如图 3、图 4所示。可以看出,开始时前车速度小于主车速度,主车能够快速减速,在10 s左右与前车速度保持一致,同时能够对期望车间距进行较好的跟随。

|
| 图 3 匀速跟随工况车速 Fig. 3 Speed under constant speed following condition |
| |

|
| 图 4 匀速跟随工况车间距 Fig. 4 Distance under constant speed following condition |
| |
(2) 加速跟随工况
前车和主车初始间距为50 m,主车初始速度为25 m/s,前车0~10 s内从25 m/s匀加速到28 m/s,仿真结果如图 5、图 6所示。可以看出,主车在10 s之后完全跟上前车速度,具有良好的速度跟随能力。在期望车间距跟随方面,由于初始时刻两车的速度以及相对速度均较小,所以期望车间距小于初始时刻的实际车间距,主车在开始时加速度大于前车加速度,以使实际车间距快速接近期望车间距。当两车速度逐渐增大时,期望车间距也不断增加,直到前车进入匀速行驶状态。前车匀速行驶阶段,实际车间距达到期望车间距,主车的车速收敛于前车车速,具有良好的跟随性能。

|
| 图 5 加速跟随工况车速 Fig. 5 Speed under accelerated following condition |
| |

|
| 图 6 加速跟随工况车间距 Fig. 6 Distance under accelerated following condition |
| |
(3) 他车驶入工况
前车和主车初始间距为50 m,主车初始速度为25 m/s,前车以20 m/s的速度匀速行驶,在18 s时主车与前车之间突然驶入其他车辆,且速度低于该时刻主车速度。仿真结果如图 7、图 8所示。开始时由于主车速度大于前车速度,主车减速行驶,在8 s时,实际车间距达到期望车间距。主车速度逐渐与前车速度保持一致且实际车间距等于期望车间距。在18 s后,为保持安全距离以避免发生追尾,协同跟随系统控制主车在较短时间内减速至驶入车辆(新的前车) 速度。减速期间有小幅超调,但很快达到稳定状态,然后对新的前车速度进行跟随行驶。仿真结果表明,协同跟随控制系统能够较好地应对他车驶入突发状况,保证跟随控制的安全性与稳定性。

|
| 图 7 他车驶入车速 Fig. 7 Speed under front vehicle cutting-in condition |
| |

|
| 图 8 他车驶入工况车间距 Fig. 8 Distance under front vehicle cutting-in condition |
| |
(4) 变速跟随行驶工况
前车和主车初始车间距为50 m,主车初始速度为25 m/s,前车初始速度为20 m/s。如图 9、图 10所示,前车速度以类似于正弦信号的趋势变化,在0~15 s加速行驶,在15~40 s减速行驶,而后又开始加速。由仿真结果可知,初期车间距较大、且主车速度大于前车速度,主车从开始时刻进行减速以跟随前方车辆。在主车减速至前车速度附近,有一较小幅度的超调量,随后能够较好地对前车速度进行跟踪。在变速跟随过程中实际车间距能较好地达到期望车间距,而且能够跟上期望车间距的变化趋势。在整个过程中,协同跟随系统都能够较快响应且具有较高的稳定性。

|
| 图 9 变速跟随工况车速 Fig. 9 Speed under variable speed following condition |
| |

|
| 图 10 变速跟随工况车间距 Fig. 10 Distance under variable speed following condition |
| |
5 结论
为在保障行车安全的前提下实现车辆跟随行驶,提出了一种基于5G V2X的协同跟随控制系统,该控制系统由5G V2X通信模块、车辆状态采集模块、协同决策层、运动控制层组成。在固定车头时距的基础上引入前车和主车的相对速度,设计了安全距离模型,用以计算期望安全距离。以车速/车间距快速跟踪、提高经济性和乘坐舒适性为目标,运用模型预测控制算法决策出期望加速度。运用模糊PID对决策层中输出的期望加速度进行跟踪,通过控制节气门开度或制动压力,使其以期望状态行驶。建立了基于MATLAB/Simulink和CarSim的联合仿真模型。在匀速跟随、加速跟随、他车驶入及变速跟随4种工况下对所提出的控制系统及其控制策略进行了仿真验证。仿真结果表明,车辆在4种工况下均能够达到良好的跟随性能。
| [1] |
崔洪军, 朱敏清, 邢江柯, 等. 信号交叉口车路协同诱导策略下ACC车辆控制模式研究[J]. 公路交通科技, 2019, 36(6): 86-93. CUI Hong-jun, ZHU Min-qing, XING Jiang-ke, et al. Study on ACC Vehicle Control Mode under Cooperative Vehicle Infrastructure Guidance Strategy for Signalized Intersection[J]. Journal of Highway and Transportation Research and Development, 2019, 36(6): 86-93. DOI:10.3969/j.issn.1002-0268.2019.06.012 |
| [2] |
张明智. 基于模型预测控制理论的纯电动车自适应巡航控制策略研究[D]. 长春: 吉林大学, 2020. ZHANG Ming-zhi. Research on Adaptive Cruise Control Strategy for Electric Vehicle Based on MPC[D]. Changchun: Jilin University, 2020. |
| [3] |
吴光强, 张亮修, 刘兆勇, 等. 汽车自适应巡航控制系统研究现状与发展趋势[J]. 同济大学学报(自然科学版), 2017, 45(4): 544-553. WU Guang-qiang, ZHANG Liang-xiu, LIU Zhao-yong, et al. Research Status and Development Trend of Vehicle Adaptive Cruise Control Systems[J]. Journal of Tongji University (Natural Science Edition), 2017, 45(4): 544-553. DOI:10.11908/j.issn.0253-374x.2017.04.012 |
| [4] |
龚李龙. 车辆自适应巡航控制系统的算法研究[D]. 杭州: 浙江大学, 2012. GONG Li-long. Study on Algorithm of Vehicle Adaptive Cruise Control System[D]. Hangzhou: Zhejiang University, 2012. |
| [5] |
李肖含. 汽车自适应巡航控制系统模糊控制策略研究[D]. 北京: 北京理工大学, 2015. LI Xiao-han. Research on Fuzzy Control Strategy of Automotive Adaptive Cruise Control System[D]. Beijing: Beijing Institute of Technology, 2015. |
| [6] |
初亮, 李天骄, 孙成伟. 纯电动车自适应巡航纵向控制方法研究[J]. 汽车工程, 2018, 40(3): 277-282, 296. CHU Liang, LI Tian-jiao, SUN Cheng-wei. A Research on Adaptive Cruise Longitudinal Control Scheme for Battery Electric Vehicles[J]. Automotive Engineering, 2018, 40(3): 277-282, 296. |
| [7] |
HEDRICK J K, MCMAHON D, NARENDRAN V, et al. Longitudinal Vehicle Controller Design for IVHS Systems[C] // Proceedings of the American Control Conference. Boston: IEEE, 1991: 3107-3112.
|
| [8] |
XAVIER P, PAN Y. A Practical PID-based Scheme for the Collaborative Driving of Automated Vehicles[C] // Proceedings of the Joint 48th IEEE Conference on Decision and Control and 28th Chinese Control Conference. Shanghai: IEEE, 2009: 966-971.
|
| [9] |
AMIR M, VAHID F, GIVARGIS T. Switching Predictive Control Using Reconfigurable State-based Mode[J].
ACM Transactions on Design Automation of Electronic Systems, 2019, 24(1): 1-21.
DOI:10.1145/3267126 |
| [10] |
HE J, CHEN H H, CHEN T M, et al. Adaptive Congestion Control for DSRC Vehicle Networks[J].
IEEE Communications Letters, 2010, 14(2): 6-13.
DOI:10.1109/LCOMM.2010.02.092002 |
| [11] |
WANG Y J, BING Y, LI K Q. Longitudinal Acceleration Tracking Control of Low Speed Heavy-duty Vehicles[J].
Tsinghua Science and Technology, 2008, 13(5): 636-643.
DOI:10.1016/S1007-0214(08)70102-0 |
| [12] |
SHAKOURI P, ORDYS A, ASKARI M R, et al. Adaptive Cruise Control with Stop & Go Function Using the State-dependent Nonlinear Model Predictive Control Approach[J].
ISA Transactions, 2012, 51(5): 622-631.
DOI:10.1016/j.isatra.2012.05.001 |
| [13] |
胡杰, 鲁若宇, 陈瑞楠, 等. 基于改进人工势场的协同式自适应巡航控制方法[C] // 2020中国汽车工程学会年会论文集(1). 北京: 机械工业出版社, 2020: 88-93. HU Jie, LU Ruo-yu, CHEN Rui-nan, et al. An Artificial Potential Field-based CACC Controller for Autonomous Road Vehicles[C] // Proceedings of 2020 China SAE Congress & Exhibition (SAECCE) (1). Beijing: China Machine Press, 2020: 88-93. |
| [14] |
李通, 鹿应荣, 王庞伟, 等. 基于模糊PID的车辆协同跟随控制算法研究[C] // 2014第9届中国智能交通年会大会论文集. 北京: 电子工业出版社, 2014: 350-360. LI Tong, LU Ying-rong, WANG Pang-wei, et al. Research of Cooperative Car-following Control Algorithm Based on Fuzzy PID[C] // 2014 Proceedings of the 9th China Intelligent Transport Conference. Beijing: Publishing House of Electronics Industry, 2014: 350-360. |
| [15] |
WANG P D, SUN Z P, TAN J, et al. Development and Evaluation of Cooperative Adaptive Cruise Controllers[C] // 2015 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing: IEEE, 2015: 1607-1612.
|
| [16] |
李斌, 侯德藻, 张纪升, 等. 论智能车路协同的概念与机理[J]. 公路交通科技, 2020, 37(10): 134-141. LI Bin, HOU De-zao, ZHANG Ji-sheng, et al. Study on Conception and Mechanism of Intelligent Vehicle-infrastructure Cooperation[J]. Journal of Highway and Transportation Research and Development, 2020, 37(10): 134-141. DOI:10.3969/j.issn.1002-0268.2020.10.015 |
| [17] |
张心睿, 王润民, 石娟, 等. 典型V2X通信技术标准化进展及对比分析研究[C] // 2020中国汽车工程学会年会论文集(1). 北京: 机械工业出版社, 2020: 155-160. ZHANG Xin-rui, WANG Run-min, SHI Juan, et al. Progress and Comparative Analysis of Standardization of Typical V2X Communication Technology[C] // Proceedings of 2020 China SAE Congress & Exhibition (SAECCE) (1). Beijing: China Machine Press, 2020: 155-160. |
| [18] |
FAEDO N, OLAYA S, RINGWOOD J. Optimal Control, MPC and MPC-like Algorithms for Wave Energy Systems: An Overview[J].
IFAC Journal of Systems and Control, 2017, 1: 37-56.
DOI:10.1016/j.ifacsc.2017.07.001 |
| [19] |
龚建伟. 无人驾驶车辆模型预测控制[M]. 北京: 北京理工大学出版社, 2014. GONG Jian-wei. Model Predictive Control for Self-driving Vehicles[M]. Beijing: Beijing Institute of Technology Press, 2014. |
| [20] |
杨柯普. 基于V2X的多车协同控制技术研究[D]. 成都: 西华大学, 2019. YANG Ke-pu. Research on Multi-vehicle Cooperative Control Technology Based on V2X[D]. Chengdu: Xihua University, 2019. |