 2022, Vol. 39
2022, Vol. 39扩展功能
文章信息
- 洪家乐, 曲大义, 贾彦峰, 赵梓旭, 郭海兵
- HONG Jia-le, QU Da-yi, JIA Yan-feng, ZHAO Zi-xu, GUO Hai-bing
- 智能网联混合车流的动态特性及稳态控制策略
- Dynamic Characteristics and Steady State Control Strategy of Intelligent Networked Mixed Traffic Flow
- 公路交通科技, 2022, 39(3): 125-132
- Journal of Highway and Transportation Research and Denelopment, 2022, 39(3): 125-132
- 10.3969/j.issn.1002-0268.2022.03.016
-
文章历史
- 收稿日期: 2020-12-17




城市主干路作为贯穿城市交通网络的重要道路,是城市交通安全、快速、稳定的重要保证,其运行态势直接影响整个城市路网的通行效率和运载能力。近年来,随着道路基础设施的愈加完善以及基于车路协同的智能交通体系不断发展,道路交通问题也在逐步改善,但是这些举措并没有改善交通流的原有属性,难以从本质上去解决道路车流引发的一些问题。智能网联、车路协同、自动驾驶等技术环境重塑微观车车交互行为与宏观车流运行特性,车辆跟驰特性和车流运行特性均呈现出新的结构性变化;研究网联混合车流的跟驰特性,并提出对应的稳态响应策略,对提高车辆行驶的安全性和道路通行能力等方面具有重要的理论价值。
Ngoduy等[1]分析研究了交通流的不稳定性,采用线性分析方法确定了非均匀交通流的稳定阈值,从理论上可以捕捉随机加速度对交通不稳定的影响。由于人类驾驶行为的不确定性,车辆的控制和稳定性变得更加复杂。因此,如何准确地模拟HVs与AVs之间的相互作用,特别是考虑驾驶员的随机行为,对于混合交通流有效可靠的估计、控制和优化至关重要。Zhu等[2]通过Bando模型来研究普通车辆和自动车辆混合交通流的稳定性,验证了自动驾驶汽车在防止冲击波传播方面是有效的。Work等[3]通过混合普通车和自动驾驶车辆调查交通流,在已有模型的基础上,建立了描述混合交通流的2阶连续交通流模型,数值结果验证了完全非线性粒子滤波方法估计交通状态的有效性。Jin等[4]从网络物理的角度出发,考虑驾驶员反应延迟和CAVs获得的多前车信息建立了一个混合流量的确定性模型,研究了不同的CAVs渗透率、驾驶员反应延误和CAVs能够获取信息的车辆数量下的系统稳定性,对混合交通流进行适当的控制,可以显著提高混合交通流的稳定性,这在理论上和经验上都得到了研究。Chen等[5]讨论了包括加速率、期望速度和跟车行为在内的异质车辆行为对混合交通的交通动态和吞吐量的影响。Ghiasi等[6]制定了AVs控制策略,以协调速度和稳定混合交通流。Stern等[7]的一项现场试验研究表明,单个自主车辆可以通过一组具有校准参数的简单控制策略来抑制停行波。Cui等[8]研究发现对于包含许多人工驾驶车辆和单个AV的环形装置,当AV具有一种控制策略以促进其以平衡速度行驶时,可实现流量稳定。在数学上,控制器的有效性是通过线性化邻域内有效的线性稳定性分析(即在光滑均匀的平衡流附近)来确定的。因此,对控制器的分析应被解释为稳定了平衡点周围的流动,从而防止了停波和行波的产生。
以上研究表明网联车辆对于稳定车流态势具有良好的效果,然而网联车的普及不是一蹴而就的,在未来一段时间内网联车与传统车构成的混合车流研究具有重要的现实意义,从交通工程角度研究道路网联混合车流的稳定性是当前阶段最重要的工作。故本研究运用速度-间距函数描述网联混合车流动态特性的分子跟驰模型;基于车路协同理论设计网联混合车流稳态控制策略,平衡传统车流的不稳定性;应用实测交通流数据验证传统车流跟驰行为的波动特征;仿真分析网联混合车流缓和车流波动的稳定效果。
1 网联混合车流的分子跟驰特性解析将车流的运动微化到分子运动,分子在受力下不易压缩又不易膨胀的现象与跟驰车辆间的速度和间距变化引起车流波动的情况十分相似,因此类比车辆间靠近或远离的跟驰现象,从动力学角度就是在引力与斥力合力作用下的运动[9]。道路上行驶车辆之间的跟驰关系与分子之间的力学关系有相似的特征,本研究将车流看作流动的液体,每一辆车看作是液体分子。车流跟驰在单车道的表现是车流某部位车辆突然加速或减速,跟驰车辆采取相应驾驶行为[10]。处于这种状态的车流一般呈现3种特性: 制约性、滞后性、传递性,即车流之间相互联系、相互影响所表现出来的行为[11]。而单车道环境下的车流跟驰运动表现出的类似于液体分子流动的特性,称为车流的分子跟驰特性。
对于网联混合车流而言,车队运行态势基本保持稳定,车间距总是在某个固定距离周围摆动,就像分子一样,2个分子之间由于存在一定的斥力和引力作用,既不能无限地靠近,又不能无限地离远。车队中任意1辆车的行为均受到其前导车行为的影响,跟驰驾驶人会考虑前导车的运行状态采取相应的措施,再传递到网联车时前车的影响会趋于消散,网联车的动态调整又是网联混合车流稳定性分析的基础。
2 网联车流的分子跟驰建模及稳态策略设计 2.1 网联车流分子跟驰模型假设有n-1辆传统车和1辆网联车在同一车道上沿着单行道行驶,且所有传统车的制动性能都是一样的。以图 1前导车1为例,跟驰车1在前导车1后以一定速度跟驰行驶,其前后均有一定的距离,保证车流在运行过程中的需求安全。跟驰车1对前导车1的距离最远端称为需求前沿,跟驰车1对跟驰车2的最远端称为安全后沿。车流的跟驰行为实质上就是车队中的车辆为了满足需求前沿和要求后沿条件而产生的变化,考虑了人工车驾驶行为的随机性,建立了基于跟驰车辆速度与车辆间距关系的网联混合车流跟驰模型。

|
| 图 1 单车道车辆跟驰示意图 Fig. 1 Schematic diagram of single lane car-following |
| |
如图 2所示,假设xn(t)和vn(t)表示在t∈(0, T)时刻若n辆车的位置和速度,在相t时刻车辆n与车辆n-1的车头间距sn(t)表示为:

|
(1) |

|
| 图 2 车流运行时空图 Fig. 2 Time-space diagram of traffic flow operation |
| |

|
| 图 3 车流车头时距与间距变化图 Fig. 3 Diagram of changes of headway and distance in traffic flow |
| |
车辆n的位置表示为:

|
(2) |
式中,xn(0)为车辆n在0时刻的初始位置;vn(τ)为车辆n在τ时刻的瞬时速度,τ∈(0, t)。
联立(1)和(2)得:

|
(3) |
由于人工车驾驶行为的随机性及交通流的非线性特性,引入Newell非线性跟驰[12]模型:

|
(4) |
式中,Vnf为第n辆车的最大速度或自由流速度;λn为前车对车辆n的影响系数,λn=0为前车对后车无影响,λn=1为前车对后车有影响;dn为最小安全车辆间距。
将(1)式代入(4)式得:

|
(5) |
联立(3),(4)和(5)得:

|
(6) |
车头时距和间距在不同驾驶员之间随机变化,也随时间变化:

|
(7) |
在车辆跟驰过程中,由于无法超车和变道,则跟随车的速度受前导车的速度限制,在(t, t+Δt)时间间隔内,车辆n可能加速、减速或平稳运行,则

|
(8) |
式中Δt为车辆n到达车辆n-1位置所需的时间,Δt∈[tn-1(x), tn(x)]。

|
(9) |
式中vn(t+c)为车辆n在时间t时的瞬时速度,c∈(0, Δt)是一个中间值。

|
(10) |

|
(11) |
式中an(t+c)为车辆n在时间t时的加速度,c∈[0, Δt]是一个中间值。
在宏观交通流运行中流量密度关系类似三角形[13],随着流量增加,密度也随着增大,反映到道路车辆时空运行变化时,从自由流到阻塞流,车辆间距随着车流增加间距在逐渐变小,直至车辆静止,因此流量密度关系图[14]与车辆运行时间图有着相互关联性,位置x和时间t的关系函数由流量q-密度ρ有关,则有:
|
(12) |
式中q(x, t)为在时间维上变化。
|
(13) |
式中ρ(x, t)为在空间维上变化。
结合宏观速度的定义,联立(12)和(13)得:
|
(14) |
式中x∈[xn(t), xn-1(t)],t∈[tn-1(x), tn(x)]。
|
(15) |
联立式(6)和式(15)得网联车流分子跟驰模型为:

|
(16) |
由于人工驾驶车辆在实际运行中受到道路条件、交通条件、控制条件、交通环境等主要因素的干扰,导致人工驾驶车辆理论速度与实际速度有少许偏差,为使网联混合车流模型更为准确,以实际道路的交通状况为基础对速度进行调整,排除道路交通环境和驾驶人身体条件的影响,保证了车辆跟驰中的变量只有速度和车头间距。根据交通工程学中道路通行能力的计算方法[15],类比人工驾驶速度,以实际道路和交通状况为基础确定实际速度的修正系数,因此建立车辆速度修正方程:

|
(17) |
式中,vs为实际交通流下的人工驾驶车辆速度;vL为建立的跟驰模型理论速度;Y1为车道宽度修正系数,根据实际情况取值为1;Y2为视距不足修正系数,一般取值为0.9~1,Y3为沿途条件修正系数(主要是指车辆的组成)。
基于智能网联技术,网联车不仅配有必要的传感器还具备车车通信功能,可以实时获取前车行驶状态,从而更好地优化自身的跟驰行为。根据文献[16]的C-LCM模型可知:
|
(18) |
式中,
网联车的速度和位置信息更新如下:

|
(19) |

|
(20) |
当车流在受到外界环境干扰时会出现一些失稳的情况,此时车流平均速度要低于正常运行速度。由于人工驾驶行为的不确定性致使车流失稳常伴有剧烈的速度振荡。速度振荡可能导致道路的通行能力显著下降,这将进一步加剧车流速度崩溃[6]。抑制车流波动的一个方法是稳态控制,其目的是通过控制某些变量来减少车流速度的波动。新兴的网联技术能够精确地执行良好的驾驶策略,通过实时调整网联跟驰车与前导车的距离差项和速度差项,使车流达到一个良好的行驶状态,尽可能地减缓车流的失稳冲击,以改善道路车流的运行态势,图 4为网联车稳态控制机理。

|
| 图 4 智能反馈控制机理 Fig. 4 Intelligent feedback control mechanism |
| |
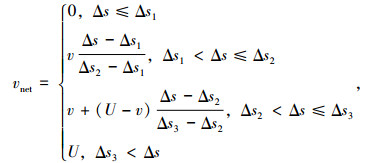
网联车辆在跟随驾驶时,通过探测前车状态进行跟驰控制,保证在前车紧急制动时,网联车不会与前车发生碰撞,且能保持车辆驾驶的舒适性,需对网联车进行平稳控制。网联跟驰车反应的刺激项分别是前导车与跟驰车需求安全距离之差(即距离差项)、前导车速度与网联跟驰车速度之差(即速度差项)。根据文献[17]的研究方法,将网联车探测的距离差项分为3个状态:车辆跟驰最小间距、车辆跟驰常态安全间距、车辆跟驰最大间距,通过网联车探测传感器实时更新跟驰间距,反馈到网联车的速度控制。基于智能反馈控制理论,设计网联驾驶车的稳态控制策略:
|
(21) |
式中,vnet为网联车基于前车信息反馈的输出速度;U为跟驰前车最大速度;v为探测到前车的实际速度;Δs为网联车跟驰间距;Δs1为车辆跟驰最小安全间距;Δs2为车辆跟驰常态安全间距;Δs3为车辆跟驰最大安全间距。
考虑稳态控制策略对于道路车流的效果,采用微扰法进行验证。微扰法是求解相对于某个初始系统具有一微小改变的系统的电磁场本征值的一种近似方法。它将待求系统看作为由某个较简单的初始系统的某个参量发生微小改变所形成的微扰系统。以前导车1为例,在车流稳定运行时,给于头车一个微弱的速度干扰,从而使得车流的整体运行态势发生改变,这种现象被视为一个小扰动。当驾驶员确保其行驶安全后又恢复稳定行驶状态,跟驰车流也逐渐恢复平稳,这就是1个微扰现象。
3 跟驰模型验证 3.1 数据采集为使网联混合车流跟驰模型更加准确,需要实际交通流数据对模型进行校准,以青岛市黄岛区的滨海大道为例,采集路段长400 m,通过路段数据与所建车流模型进行拟合。在滨海大道沿线选取高点位,使用全景高清摄像机以每秒10帧为间隔对路段交通流进行15 min的连续拍摄,之后利用计算机软件对影像资料进行提取分析,获得试验所需数据。试验数据主要包括车辆编号、车辆长度、车型、车辆所在车道编号、速度、加速度、与前车间距、所处时间节点、跟驰前车编号、跟驰后车编号等。
3.2 参数标定为了保证数据的实用性,本研究根据路段采集到的数据,将交通流分为自由流、稳定流、堵塞流3种状态。由于原始数据通过图像识别技术获取,实际应用会存在个别数据异常。为保证所用数据能够合理描述车流运行状态下的随机速度与车头间距变化规律,先进行跟驰数据筛选:车辆跟驰至少60 s;车型均为小型车;车辆在行驶中不进行换道;然后对数据进行降噪处理。速度与道路通行能力是相关的,影响通行能力的大小[18],根据文献[15]中道路通行能力影响因素的取值范围结合最小二乘法进行速度修正,故取Y2=1,Y3=0.9。根据文献[16]的方法,取值pn=un=0.1。
3.3 模型验证基于上述数据对车辆进行了模型仿真,图 5(a)所示为车辆跟驰模型仿真图,图 5(b)所示为车辆跟驰模型实测图,反映了车辆在稳定流跟驰状态下的加速、减速变化的过程。仿真图与实测图的相关程度达到0.95,建立的车辆速度修正方程与实际工况基本吻合,体现了车辆在跟驰行驶过程中的随机性,可以保证网联混合车流模型的准确性。

|
| 图 5 车辆跟驰模型仿真与实测对比 Fig. 5 Comparison between simulation of car-following model and measurement |
| |
4 数值仿真分析 4.1 数值仿真
为验证网联车稳态控制策略的实际效果,设计数值仿真方案。建立单车道行驶队列,只考虑车辆跟驰状态,将本研究构建的分子跟驰模型应用到车流中,采用微扰法分别对2列(1列人工驾驶车队和1列网联混合车队)处于同步流状态行驶的车队进行扰动操作,得到车队整体和各个车辆的状态演化情况。
在同步流平衡态中给于头车一个加速度干扰,探索扰动随时间的变化规律,研究车流的波动情形。如果车流是稳定的,随着时间推移,该扰动在到达尾车时逐步减弱至消失,车流回归到平衡态;如果系统是不稳定的,初始扰动将不断被放大,最终演化为车流拥堵。综合考虑车流的稳态变化,选取两组车流进行试验:一组为驾驶人车流;一组为网联混合车流。
设置初始时车头间距为7.5 m,给于两车初始速度为1 m/s,前车从初始位置开始做匀加速运动,加速度为1 m/s2,当速度达到13 m/s时,匀速行驶10 s后给于头车一个1.3 m/s2的减速度干扰,前车开始做匀减速运动直至停止。后车紧跟前车行驶,与前车保持安全,如表 1所示。
| 前车 | 后车 | 相对差 | |||||||
| 加速度/(m·s-2) | 速度/(m·s-1) | 距离/m | 加速度/(m·s-2) | 速度/(m·s-1) | 距离/m | 速度/(m·s-1) | 距离/m | ||
 |
 |
x1 |  |
 |
x2 |  |
x1-x2 | ||
| 1.0 | 1.0 | 0.0 | 0.00 | 1.00 | -7.5 | 0.00 | 7.5 | ||
4.2 扰动分析
从图 6(a)的数值仿真可以看出,在前导车加速行驶的前几秒,传统车跟驰的速度有微小的动荡变化,最后与前车保持一致;在匀速和减速行驶过程中也有同样的情形,表明前车的加减速度对后车有一定影响,后车的速度在前车的速度值上下浮动。在整个过程中两车的车头间距随前车速度的增加而变大,在前车匀速行驶时逐渐稳定,在前车受到减速度干扰时,车头间距随车速的降低而减小,直至前车停止。从图 6(b)可以看出,网联车在前导车加速行驶的前几秒,网联车与前导车的车头间距逐渐增加,至前导车匀速行驶时车头间距趋于稳定,且随前导车匀速行驶时,网联车做匀速行驶,在前导车受到干扰时,网联车根据稳态策略缓慢调整车速,车头间距没有传统车流跟驰时出现车间距忽大忽小的情形。从表 2中的速度方差与间距方差对比分析,网联车在跟随前导车运行时相对于传统车跟驰比较稳定,能够缓解车流在受到外扰后车流的运行态势。

|
(22) |

|
(23) |

|
| 图 6 车流跟驰间距效果对比 Fig. 6 Comparison of car-following distances |
| |
| 速度方差 | 车头间距方差 | |
| 传统车流跟驰 | 19.37 | 87.71 |
| 网联混合车流跟驰 | 17.89 | 50.81 |
5 结论
通过分子跟驰模型的构建及仿真,还原了现实场景中的车辆跟驰情况,较为准确地描述了车流在运行过程中的时快时慢的跟驰情况,及车辆跟驰行为下传统车之间由于跟驰间距刺激而表现出的车速波动。在此基础上设计网联车的稳态控制策略,数值仿真网联车跟驰与传统车跟驰行为,对比分析单车道跟驰状态下的传统车流与网联混合车流从平衡态到受到外界干扰后车流的波动情况;仿真发现当处于平衡态的网联混合车队中的前车受到微扰后,网联车可以减缓或抑制交通干扰的传递,有效改善混合车流的稳定性,对于道路通行能力的提升和通行安全有着重要的作用。研究主要针对均质交通流建模,对于城市快速路多重异质的交通流研究稍显不足,以后的研究会加以考虑。同时对于地方车辆工况不同,还需要继续深化才足以推广到更大的适用范围。
| [1] |
NGODUY D, LEE S, TREIBER M, et al. Langevin Method for a Continuous Stochastic Car-following Model and Its Stability Conditions[J].
Transportation Research Part C: Emerging Technologies, 2019, 105(10): 599-610.
|
| [2] |
ZHU W, ZHANG H M. Analysis of Mixed Traffic Flow with Human-driving and Autonomous Cars Based on Car-following Model[J].
Physica A: Statistical Mechanics and Its Applications, 2018, 496: 274-285.
|
| [3] |
WANG R, LI Y, WORK D B, et al. Comparing Traffic State Estimators for Mixed Human and Automated Traffic Flows[J].
Transportation Research Part C: Emerging Technologies, 2017, 78(3): 95-110.
|
| [4] |
JIN S, SUN D H, ZHAO M, et al. Modeling and Stability Analysis of Mixed Traffic with Conventional and Connected Automated Vehicles from Cyber Physical Perspective[J].
Physica A: Statistical Mechanics and Its Applications, 2020, 551.
|
| [5] |
CHEN D, SRIVASTAVA A, AHN S, et al. Traffic Dynamics under Speed Disturbance in Mixed Traffic with Automated and Non-automated Vehicles[J].
Transportation Research Part C: Emerging Technologies, 2019, 113(1): 293-313.
|
| [6] |
GHIASI A, LI X, MA J, et al. A Mixed Traffic Speed Harmonization Model with Connected Autonomous Vehicles[J].
Transportation Research Part C: Emerging Technologies, 2019, 104: 210-233.
|
| [7] |
STERN R E, CUI S, MONACHE M L D, et al. Dissipation of Stop-and-go Waves via Control of Autonomous Vehicles: Field Experiments[J].
Transportation Research Part C: Emerging Technologies, 2018, 89: 205-221.
|
| [8] |
CUI S, SEIBOLD B, STERN R, et al. Stabilizing Traffic Flow via a Single Autonomous Vehicle: Possibilities and Limitations[C]// 2017 IEEE Intelligent Vehicles Symposium (IV). Los Angeles: IEEE, 2017: 1336-1341.
|
| [9] |
李娟, 曲大义, 刘聪, 等. 基于分子动力学的跟驰特性及其模型[J]. 公路交通科技, 2018, 35(3): 126-131. LI Juan, QU Da-yi, LIU Cong, et al. Car-following Characteristics and Its Models Based on Molecular Dynamics[J]. Journal of Highway and Transportation Research and Development, 2018, 35(3): 126-131. |
| [10] |
曲大义, 李娟, 刘聪, 等. 基于分子动力学的车流运行动态特性及其模型[J]. 交通运输系统工程与信息, 2017, 17(4): 188-194. QU Da-yi, LI Juan, LIU Cong, et al. Dynamic Characteristics Model of Traffic Flow Based on Molecular Dynamics[J]. Journal of Transportation Systems Engineering and Information Technology, 2017, 17(4): 188-194. |
| [11] |
陈秀锋, 郭涛, 曲大义, 等. 基于分子跟驰特性的交通流稳定性分析[J]. 公路交通科技, 2013, 30(5): 112-117. CHEN Xiu-feng, GUO Tao, QU Da-yi, et al. Analysis on Traffic Flow Stability Based on Molecular Following Behavior[J]. Journal of Highway and Transportation Research and Development, 2013, 30(5): 112-117. |
| [12] |
NEWELL G F. Nonlinear Effects in the Dynamics of Car Following[J].
Operations Research, 1961, 9(2): 209-229.
|
| [13] |
DAGANZO C F. Fundamentals of Transportation and Traffic Operations[M].
Oxford: Pergamon Press, 1997.
|
| [14] |
王殿海. 交通流理论[M]. 北京: 人民交通出版社, 2002. WANG Dian-hai. Traffic Flow Theory[M]. Beijing: China Communications Press, 2002. |
| [15] |
王炜, 过秀成. 交通工程学[M]. 南京: 东南大学出版社, 2011. WANG Wei, GUO Xiu-cheng. Traffic Engineering[M]. Nanjing: Southeast University Press, 2011. |
| [16] |
吴兵, 王文璇, 李林波, 等. 多前车影响的智能网联车辆纵向控制模型[J]. 交通运输工程学报, 2020, 20(2): 184-194. WU Bing, WANG Wen-xuan, LI Lin-bo, et al. Longitudinal Control Model for Connected Autonomous Vehicles Influenced by Multiple Preceding Vehicles[J]. Journal of Traffic and Transportation Engineering, 2020, 20(2): 184-194. |
| [17] |
陈文娇, 曲大义, 杨万三, 等. 基于分子动力学的车辆需求安全距离及模型[J]. 青岛理工大学学报, 2014, 35(1): 94-99, 110. CHEN Wen-jiao, QU Da-yi, YANG Wan-san, et al. Molecular Kinetics Behavior of Car-following Required Safe Distance and Its Model[J]. Journal of Qingdao Technological University, 2014, 35(1): 94-99, 110. |
| [18] |
徐桃让, 姚志洪, 蒋阳升, 等. 智能网联车环境下考虑反应时间影响的基本图模型[J]. 公路交通科技, 2020, 37(8): 108-117. XU Tao-rang, YAO Zhi-hong, JIANG Yang-sheng, et al. Fundamental Diagram Model of Considering Reaction Time in Environment of Intelligent Connected Vehicles[J]. Journal of Highway and Transportation Research and Development, 2020, 37(8): 108-117. |